Download as pdf or txt
You might also like
- Forecasting For Dynasol Industries: T University of Akron 6500: 680 S C L M Case Assignment 2Document8 pagesForecasting For Dynasol Industries: T University of Akron 6500: 680 S C L M Case Assignment 2Rubayat IslamNo ratings yet
- 7080 HandbookDocument139 pages7080 Handbookdony prabuNo ratings yet
- Analytical Chemistry Topics Lecture (Adamson University)Document10 pagesAnalytical Chemistry Topics Lecture (Adamson University)Rolie CastroNo ratings yet
- MAQUET CARDIOHELP Disposables HLS - Module - Advanced PDFDocument2 pagesMAQUET CARDIOHELP Disposables HLS - Module - Advanced PDFXavi AnpiNo ratings yet
- FVDAM FlowchartDocument1 pageFVDAM FlowchartDarko IvancevicNo ratings yet
- Astm E562 19Document4 pagesAstm E562 19aminsuhadiNo ratings yet
- LGCIV2051 - Thiessen + Hydrological BalanceDocument2 pagesLGCIV2051 - Thiessen + Hydrological BalanceMohammad BattalNo ratings yet
- A) Ziegler-Nichols Method:: Exercises Simulator Automatisation 3th Bachelor Marine EngineeringDocument3 pagesA) Ziegler-Nichols Method:: Exercises Simulator Automatisation 3th Bachelor Marine EngineeringvivekvkumarNo ratings yet
- ST 3009 Lecture 3Document24 pagesST 3009 Lecture 3dilanidameNo ratings yet
- Lab LVDT 2017Document7 pagesLab LVDT 2017KyoRakurin DavidNo ratings yet
- Heat Lab 3 CV1Document12 pagesHeat Lab 3 CV1Alexis VélezNo ratings yet
- LabSheet2 (Traversing) PDFDocument9 pagesLabSheet2 (Traversing) PDFElilragiGanasanNo ratings yet
- University of Mauritius: Faculty of Engineering Mechanical & Production Engineering DepartmentDocument17 pagesUniversity of Mauritius: Faculty of Engineering Mechanical & Production Engineering Departmenthansley100% (1)
- Experiment No. 4 New858Document3 pagesExperiment No. 4 New858Silent KhanNo ratings yet
- Wetted Wall ColumnDocument8 pagesWetted Wall ColumnSameer NasirNo ratings yet
- Experiment No. 9 Hydraulic Jump I. Objectives: To Observe The Hydraulic Jump in Open Channel Flow by The Use of Control Gates and WeirsDocument5 pagesExperiment No. 9 Hydraulic Jump I. Objectives: To Observe The Hydraulic Jump in Open Channel Flow by The Use of Control Gates and WeirsJohn Emerald GoloNo ratings yet
- Rain Water Basin DesignDocument11 pagesRain Water Basin DesignSturza AnastasiaNo ratings yet
- Discharge CoefficientDocument5 pagesDischarge CoefficientHannan AyubNo ratings yet
- Power Electronics 2Document9 pagesPower Electronics 2Jontelli SimonNo ratings yet
- 17AIC BaylonDocument12 pages17AIC Baylonskdelacruz.djdengrNo ratings yet
- Experiment3 ForcedOscillation G34 ECE2023Document13 pagesExperiment3 ForcedOscillation G34 ECE2023Trần QuânNo ratings yet
- Potentiometer Report Abdulaziz 14Document19 pagesPotentiometer Report Abdulaziz 14عبدالعزيز شقحانNo ratings yet
- RtgergregDocument13 pagesRtgergregabod saadehNo ratings yet
- Calibration of Supersonic Wind Tunnel: Experiment No: 4 Date: 21/08/2018 AimDocument5 pagesCalibration of Supersonic Wind Tunnel: Experiment No: 4 Date: 21/08/2018 Aimbad guyNo ratings yet
- Islamic University of Gaza Faculty of Engineering Department of Mechanical EngineeringDocument9 pagesIslamic University of Gaza Faculty of Engineering Department of Mechanical EngineeringwasemNo ratings yet
- T2 EosDocument17 pagesT2 EosKush ShahNo ratings yet
- Solution: Vertical Section Depth (FT.) Avg. Vel. (FPS)Document6 pagesSolution: Vertical Section Depth (FT.) Avg. Vel. (FPS)Lamberto Bancoro Marcial Jr.No ratings yet
- Faculty of Engineering Mechanical Engineering Program: Vibration Engineering Lab: KM31401: LAB IVDocument7 pagesFaculty of Engineering Mechanical Engineering Program: Vibration Engineering Lab: KM31401: LAB IVhasmikaNo ratings yet
- Digital CaliperDocument18 pagesDigital Caliperdzaky fawwazNo ratings yet
- American University of Beirut CIVE 663 Transportation Systems Analysis Spring 2021-2022 Homework Assignment 2Document6 pagesAmerican University of Beirut CIVE 663 Transportation Systems Analysis Spring 2021-2022 Homework Assignment 2Khalil FanousNo ratings yet
- Marcet BoilerDocument14 pagesMarcet BoilerPeter LauNo ratings yet
- Sensor CalibrationDocument11 pagesSensor Calibrationupeksha erandiNo ratings yet
- Panel Lifting Line Methods AERODocument27 pagesPanel Lifting Line Methods AEROzhigueras18No ratings yet
- Lift and Drag Lab Report Raphael EfstathiouDocument9 pagesLift and Drag Lab Report Raphael EfstathiouRaphael EfstathiouNo ratings yet
- 30deg AirfoilDocument14 pages30deg AirfoilAbinesh AbineshNo ratings yet
- THERMODYNAMICSDocument11 pagesTHERMODYNAMICSPeter NdisoNo ratings yet
- 11.07.2023 - (0131) Nibm Pune Energy Saving CalculationDocument58 pages11.07.2023 - (0131) Nibm Pune Energy Saving Calculationrilaxem841No ratings yet
- Weibull Ortega GurumendiDocument8 pagesWeibull Ortega GurumendiYaritza maribel ortega anzulesNo ratings yet
- Chapter Three: Experiment 3.1.1 The Counting AssemblyDocument13 pagesChapter Three: Experiment 3.1.1 The Counting AssemblyEgunjobi AbiodunNo ratings yet
- Thermofluids LabDocument14 pagesThermofluids Labحسين عمريNo ratings yet
- Truck - Cycle Time Analysis PDFDocument16 pagesTruck - Cycle Time Analysis PDFgokulNo ratings yet
- Here Is A Procedure For Field Testing The Distribution Uniformity of A Drip Irrigation SystemDocument7 pagesHere Is A Procedure For Field Testing The Distribution Uniformity of A Drip Irrigation SystemabdulazizNo ratings yet
- Experiment No. 7 New540Document4 pagesExperiment No. 7 New540Silent KhanNo ratings yet
- D2 - Crank and Slider MechanismDocument18 pagesD2 - Crank and Slider MechanismAfif HaziqNo ratings yet
- Experiment # 3: Transverse Vibrations of Beam With One/more Bodies AttachedDocument12 pagesExperiment # 3: Transverse Vibrations of Beam With One/more Bodies AttachedMuhammad Farooq100% (1)
- Horizontal Projectile MotionDocument8 pagesHorizontal Projectile MotionInu KagNo ratings yet
- Chapter Three 1Document30 pagesChapter Three 1muhyideen6abdulganiyNo ratings yet
- Eyad All ReportsDocument25 pagesEyad All ReportsHazemNo ratings yet
- Sharp Crested Weir: Assignment No. ICA-1 Module - MMD1002-NDocument11 pagesSharp Crested Weir: Assignment No. ICA-1 Module - MMD1002-NYashpal SuwansiaNo ratings yet
- Outcome Based Lab Task ReportDocument13 pagesOutcome Based Lab Task ReportAbijith MuruganNo ratings yet
- 60 Deg AirDocument14 pages60 Deg AirAbinesh AbineshNo ratings yet
- Lab1 Group1 ReportDocument19 pagesLab1 Group1 ReportLouisNo ratings yet
- Japan Test Report: Report No.: JR1D0705AE Page No.: 1 of 15 Report Version: Rev. 01Document69 pagesJapan Test Report: Report No.: JR1D0705AE Page No.: 1 of 15 Report Version: Rev. 01polish001No ratings yet
- Iut Cooling LoadDocument17 pagesIut Cooling LoadBashir Ali Sidi 191031102No ratings yet
- Control Moment Gyroscope ExperimentDocument8 pagesControl Moment Gyroscope ExperimentMohammed FarisNo ratings yet
- Wind Tunnel Calibration MemoDocument5 pagesWind Tunnel Calibration Memoapi-512393144No ratings yet
- Octane Max 1 & 2+ User Manual - enDocument60 pagesOctane Max 1 & 2+ User Manual - enSAGOBI TECH100% (1)
- WR3Document8 pagesWR3Chris AdaminovicNo ratings yet
- Lab 5-WorksheetDocument5 pagesLab 5-WorksheetShahid mailsiNo ratings yet
- Lab Report-1Document7 pagesLab Report-1Kazi Ershadul IslamNo ratings yet
- Me3112 2 Lab Dynamic Balancing Amp Gyroscopic EffectsDocument12 pagesMe3112 2 Lab Dynamic Balancing Amp Gyroscopic EffectsDenise Isebella LeeNo ratings yet
- 4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFDocument15 pages4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFusmancheema81No ratings yet
- Xilinx In-System Programming Using An Embedded MicrocontrollerDocument38 pagesXilinx In-System Programming Using An Embedded Microcontrollerusmancheema81No ratings yet
- Tasking 80196 UtilsguideDocument319 pagesTasking 80196 Utilsguideusmancheema81No ratings yet
- Lesson 2 Configuring Your Hardware: TopicsDocument41 pagesLesson 2 Configuring Your Hardware: Topicsusmancheema81No ratings yet
- LabVIEW DAQ Hands On ManualDocument75 pagesLabVIEW DAQ Hands On ManualNIUK100% (26)
- XR16C2850Document44 pagesXR16C2850usmancheema81No ratings yet
- EMI Filter DesignDocument320 pagesEMI Filter Designusmancheema81100% (6)
- EMI Filter DesignDocument320 pagesEMI Filter Designusmancheema81100% (6)
- Airdata Measurement and Calibration: Edward A. Haering, JRDocument22 pagesAirdata Measurement and Calibration: Edward A. Haering, JRusmancheema81No ratings yet
- Tasking C196 ManualDocument389 pagesTasking C196 Manualusmancheema81No ratings yet
- KJHTDocument15 pagesKJHTEngr Nayyer Nayyab MalikNo ratings yet
- 000 TablaPresionTemperaturaMO49plus PDFDocument2 pages000 TablaPresionTemperaturaMO49plus PDFAlexis QuinteroNo ratings yet
- Hydrognomon Theory English 07Document11 pagesHydrognomon Theory English 07Junior BerrocalNo ratings yet
- Infinitesimal Differences - Controversies Between Leibniz and His ContemporariesDocument337 pagesInfinitesimal Differences - Controversies Between Leibniz and His ContemporariesFreeWill100% (3)
- 21-07-2021 - SR - Super60 & ICON All - Jee-Main - GTM-41 - Question PaperDocument23 pages21-07-2021 - SR - Super60 & ICON All - Jee-Main - GTM-41 - Question PaperSohanSwapnil TechNo ratings yet
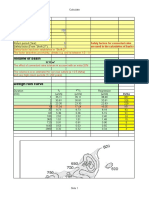
- Fire Flow CalculationsDocument37 pagesFire Flow CalculationsAmy CurryNo ratings yet
- I J E S M: A Review Paper On Concrete Mix Design of M20 ConcreteDocument4 pagesI J E S M: A Review Paper On Concrete Mix Design of M20 ConcreteKerby Brylle GawanNo ratings yet
- ALMagd C-86-C Drilling Program v1Document46 pagesALMagd C-86-C Drilling Program v1Anonymous XbmoAFtI100% (2)
- PLS Pole Tutorial Part 2Document9 pagesPLS Pole Tutorial Part 2JCuchapin100% (2)
- Rev DDocument21 pagesRev Dpsn1234567890No ratings yet
- SPICE Simulation: Chang Gung UniversityDocument34 pagesSPICE Simulation: Chang Gung UniversityJagadeesh AkuratiNo ratings yet
- SCE 100nmDocument48 pagesSCE 100nmGoogle acntNo ratings yet
- API 571 Damage MechanismsDocument42 pagesAPI 571 Damage MechanismsIsmail Jamaluddin100% (2)
- 13 Design DocsDocument78 pages13 Design DocsRites limitedNo ratings yet
- Forced Degradation StudiesDocument9 pagesForced Degradation Studiesppiccolini100% (1)
- BAS Flyer PDFDocument2 pagesBAS Flyer PDFFilip TeofilskiNo ratings yet
- L13-Rolling of MetalsDocument32 pagesL13-Rolling of MetalsAbirHasan100% (1)
- Colm/collision PaperDocument6 pagesColm/collision Paperronak204No ratings yet
- GS Ep Ele 081 enDocument16 pagesGS Ep Ele 081 entunwahbNo ratings yet
- ES 64 First Exam Answer KeyDocument6 pagesES 64 First Exam Answer KeyDinah Pearl MadeloNo ratings yet
- Chapter 5 OscDocument36 pagesChapter 5 OschasyikinNo ratings yet
- Statistical Signal Processing PK BoraDocument135 pagesStatistical Signal Processing PK Boraakash130791No ratings yet
- W 12 # 2 Calculus - Differentiation MsDocument39 pagesW 12 # 2 Calculus - Differentiation MsBader Al-SaloumNo ratings yet
- Turbulence Model in Open FoamDocument35 pagesTurbulence Model in Open FoamjahidNo ratings yet
- Motor WindingDocument40 pagesMotor WindingALI AKBARNo ratings yet
- ChymosinDocument242 pagesChymosinvbortizlNo ratings yet
- Linear Encoding of The Spatiotemporal CatDocument71 pagesLinear Encoding of The Spatiotemporal CatPredrag CvitanovicNo ratings yet
- Nonconvex Proximal Splitting With Computational Errors: Suvrit SraDocument20 pagesNonconvex Proximal Splitting With Computational Errors: Suvrit SrafhhgfghtNo ratings yet