Download as docx, pdf, or txt
You might also like
- Solved Problems Axial DeformationDocument6 pagesSolved Problems Axial DeformationChristopher Largado67% (3)
- Brymen PC Interface Schematic 3rd PartyDocument6 pagesBrymen PC Interface Schematic 3rd PartyCostinSîrgheiNo ratings yet
- VZ-30 Service ManualDocument32 pagesVZ-30 Service ManualJimmy Mayta100% (1)
- GE LP33 Series 10 60kVA Technical Data SheetDocument8 pagesGE LP33 Series 10 60kVA Technical Data SheetMuhaimin Muhammad romadhonNo ratings yet
- Industrial Automation - Technical Interview QuestionsDocument27 pagesIndustrial Automation - Technical Interview QuestionsAnjali Sharma79% (19)
- Gravimetric FeederDocument47 pagesGravimetric FeederYousuf Ali67% (3)
- Spirit Levels - Block LevelsDocument4 pagesSpirit Levels - Block LevelsGia Minh Tieu Tu100% (1)
- Industrial Production Counter Using At89S52 MicrocontrollerDocument24 pagesIndustrial Production Counter Using At89S52 MicrocontrollerrajkiritiNo ratings yet
- Automatic Room Light Controller and CounterDocument20 pagesAutomatic Room Light Controller and CounterleopaulyNo ratings yet
- Obstacle Sensed Switching in Industrial ApplicationsDocument68 pagesObstacle Sensed Switching in Industrial ApplicationsAbhijit PattnaikNo ratings yet
- Index: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionDocument19 pagesIndex: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionKrishnaBihariShuklaNo ratings yet
- Bidirectional Visitor CounterDocument28 pagesBidirectional Visitor CounterRahul Verma100% (1)
- Automatic Room Light Controller With Visitor Counter: DescriptionDocument10 pagesAutomatic Room Light Controller With Visitor Counter: DescriptionDanny PinheiroNo ratings yet
- Eye BlinkDocument31 pagesEye BlinkPoorva Gupta67% (3)
- Vivekanand Education Society'S: Institute of TechnologyDocument9 pagesVivekanand Education Society'S: Institute of TechnologyFazle RahmanNo ratings yet
- Arduino AC-DC Voltmeter PDFDocument6 pagesArduino AC-DC Voltmeter PDFyb3hgf2222No ratings yet
- Graduation Project 3Document28 pagesGraduation Project 3s.b.v.seshagiri1407No ratings yet
- Applied Science Private UniversityDocument12 pagesApplied Science Private UniversityRobin OhanyanNo ratings yet
- Bidirectional Visitor Counter SynopsysDocument6 pagesBidirectional Visitor Counter SynopsysNagaAkhilES100% (1)
- Home Security System Using Microcontroller 8051: Project Synopsis OnDocument19 pagesHome Security System Using Microcontroller 8051: Project Synopsis OndeepeshNo ratings yet
- Micro-Controller 8051 Based Obstacle Avoider RobotDocument17 pagesMicro-Controller 8051 Based Obstacle Avoider RobotMirza Abdul Waris40% (5)
- Applicatoin Note - Phil Zanotti (AD Converter)Document4 pagesApplicatoin Note - Phil Zanotti (AD Converter)arturovinnNo ratings yet
- RF and GSM Based Wireless Power Theft MonitoringDocument27 pagesRF and GSM Based Wireless Power Theft MonitoringDebashishParida50% (2)
- DATEL Application NoteDocument1 pageDATEL Application Noteyousaf_zai_khan81995No ratings yet
- M.Siva Prasadu Reddy: Submitted byDocument18 pagesM.Siva Prasadu Reddy: Submitted bySai AdithyaNo ratings yet
- Arduino Wattmeter - Measure Voltage, Current and Power ConsumptionDocument9 pagesArduino Wattmeter - Measure Voltage, Current and Power ConsumptionMihai BogdanNo ratings yet
- Street Lights White PaperDocument5 pagesStreet Lights White PaperhtsmarcoNo ratings yet
- Eye BlinkDocument31 pagesEye BlinkNarender C. PalNo ratings yet
- Project Title:-: Accident Identification and Alerting SystemDocument17 pagesProject Title:-: Accident Identification and Alerting SystemSathish KumarNo ratings yet
- RPM Measurement (Tachometer)Document10 pagesRPM Measurement (Tachometer)19E45A0229 SDESEEENo ratings yet
- Design of Micontroller Based Training Board With Serial Command Line InterfaceDocument5 pagesDesign of Micontroller Based Training Board With Serial Command Line Interfaceaye aye KhineNo ratings yet
- Working Principle: 1) System CheckDocument8 pagesWorking Principle: 1) System CheckHans IngoleNo ratings yet
- Vinutha DAQ ReportDocument16 pagesVinutha DAQ ReportVinod HandiNo ratings yet
- Table of Content: Digital OhmmeterDocument23 pagesTable of Content: Digital OhmmeterLow Koon Yee100% (1)
- Co2 Laser Card ManualDocument11 pagesCo2 Laser Card ManualJuan Carlos CosmeNo ratings yet
- Bidirectional CounterDocument15 pagesBidirectional Countermpsingh2200No ratings yet
- Automatic Room Light ControllerDocument35 pagesAutomatic Room Light ControllerUjjwal Deb BarmanNo ratings yet
- P 2700 Eyeblink Sensor in VehicleDocument25 pagesP 2700 Eyeblink Sensor in Vehicle_imsandeepNo ratings yet
- Line Following Robot Tutorial - Roboveda'12Document8 pagesLine Following Robot Tutorial - Roboveda'12Stefanus William SaputraNo ratings yet
- Basic Stamp - Digital Signal ConditioningDocument27 pagesBasic Stamp - Digital Signal ConditioningRussellNo ratings yet
- Smoke SensorDocument10 pagesSmoke SensorPrabhat SharmaNo ratings yet
- 3.design of Automated Smart Home For Smart CityDocument110 pages3.design of Automated Smart Home For Smart Citysyed nemath miyaNo ratings yet
- ProjectDocument28 pagesProjectSatyanarayana GurramNo ratings yet
- Wa0002 PDFDocument18 pagesWa0002 PDFuppulajashwanthNo ratings yet
- Open Ended Lab Report - ET201053Document7 pagesOpen Ended Lab Report - ET201053foysalarman50No ratings yet
- ACS712 Hall Effect Current SensorDocument7 pagesACS712 Hall Effect Current SensorWilliam BlackNo ratings yet
- Opto IsolationDocument5 pagesOpto IsolationMahendra JoshiNo ratings yet
- Temp Measurment Using GSMDocument12 pagesTemp Measurment Using GSMRavi JoshiNo ratings yet
- Eyeblink Sensor in VehicleDocument25 pagesEyeblink Sensor in VehicleArulNo ratings yet
- ED Real LifeDocument8 pagesED Real Lifejiraf_19No ratings yet
- AndegoDocument11 pagesAndegoFidel OtienoNo ratings yet
- Industrial Automation Engineers Interview QuestionsDocument5 pagesIndustrial Automation Engineers Interview QuestionsJêmš NavikNo ratings yet
- Auto Protection of Power Sharing Transformers For Different LoadsDocument22 pagesAuto Protection of Power Sharing Transformers For Different LoadsKamurunissa GouharNo ratings yet
- Digital Voltmeter Using Pic MicrocontrollerDocument38 pagesDigital Voltmeter Using Pic MicrocontrollerTaramba kossiNo ratings yet
- 20 Adc1Document5 pages20 Adc1vishnuksNo ratings yet
- 3axis Scanhead Control Board Manual 2012Document21 pages3axis Scanhead Control Board Manual 2012ramjoceNo ratings yet
- 78 - An EfficientDocument5 pages78 - An EfficientMuntasir AnwarNo ratings yet
- Voltmeter MasimoDocument4 pagesVoltmeter MasimorandalloeyNo ratings yet
- In Industrial Process, Speed As A Variable Refers To The ReDocument71 pagesIn Industrial Process, Speed As A Variable Refers To The Reapi-19786583No ratings yet
- Operation Manual: M-RPR2 - Rev.02 - EDocument20 pagesOperation Manual: M-RPR2 - Rev.02 - EJorge Mauricio Sepulveda CabreraNo ratings yet
- Xbee Based Home SecurityDocument21 pagesXbee Based Home Securitypiyushji125No ratings yet
- Fiber Optic Telemetry System Using Ne555Document10 pagesFiber Optic Telemetry System Using Ne555Rajesh VeerabadranNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- ReadingactivityNowwhat PDFDocument5 pagesReadingactivityNowwhat PDFLauraDMKorkmazNo ratings yet
- Manual Leroy Somer Generator Lsa 50 l8Document28 pagesManual Leroy Somer Generator Lsa 50 l8Carlos Andre Sante MancillaNo ratings yet
- EWESDocument10 pagesEWESPratham KatariyaNo ratings yet
- 510 - Sps Vega vs. SSS, 20 Sept 2010Document2 pages510 - Sps Vega vs. SSS, 20 Sept 2010anaNo ratings yet
- Fermentation of Cucumbers Brined With Calcium Chloride Instead of Sodium ChlorideDocument6 pagesFermentation of Cucumbers Brined With Calcium Chloride Instead of Sodium ChloridedupitosariNo ratings yet
- CS Form No. 4 Certification of Assumption To Duty (Enteria)Document5 pagesCS Form No. 4 Certification of Assumption To Duty (Enteria)Concepcion MpsNo ratings yet
- N Endah 2019 J. Phys. Conf. Ser. 1179 012178 PDFDocument7 pagesN Endah 2019 J. Phys. Conf. Ser. 1179 012178 PDFfeow meowNo ratings yet
- Prelim ProjectDocument8 pagesPrelim ProjectBlezel Mae AlzagaNo ratings yet
- A - B - C - Data Entry Operations (OS)Document24 pagesA - B - C - Data Entry Operations (OS)Indu GoyalNo ratings yet
- Thrive - Materials Compiled and Prepared by Prasanna RanganathanDocument41 pagesThrive - Materials Compiled and Prepared by Prasanna RanganathanVũ Thanh Đỉnh100% (2)
- BCH Filled FormDocument2 pagesBCH Filled Formcecertificateqvc1No ratings yet
- A Detailed Lesson Plan in Sine Rule 1Document13 pagesA Detailed Lesson Plan in Sine Rule 1Byron Apuli MajadasNo ratings yet
- ELEC9762 - Assignment - T1 2024Document3 pagesELEC9762 - Assignment - T1 2024Abhimanyu ChhabraNo ratings yet
- Essentials of Project Management Course OutlineDocument3 pagesEssentials of Project Management Course OutlinetesfaNo ratings yet
- Walt Disney Was Born in ChicagoDocument24 pagesWalt Disney Was Born in ChicagoNyimaSherpaNo ratings yet
- List of Companies Having SAPDocument2 pagesList of Companies Having SAPKrushikeshNo ratings yet
- HEVC TutorialDocument33 pagesHEVC TutorialLaurentiu IacobNo ratings yet
- Data Base Proyek KonstruksiDocument913 pagesData Base Proyek KonstruksiZefanyaNo ratings yet
- Megohmmeter: User ManualDocument60 pagesMegohmmeter: User ManualFlavia LimaNo ratings yet
- Nmo QuesDocument12 pagesNmo QuesmaheshnagarkarNo ratings yet
- Unit 11 Jurassic Park: Making The Film: (Write From The Textbook)Document3 pagesUnit 11 Jurassic Park: Making The Film: (Write From The Textbook)mohamed zoropNo ratings yet
- Workstationst Modbus® Instruction Guide: Gei-100696EDocument41 pagesWorkstationst Modbus® Instruction Guide: Gei-100696EЕсет ДаулетжанNo ratings yet
- POLGOVSEA - MOD 1 - IntroDocument30 pagesPOLGOVSEA - MOD 1 - IntroBryan MarasiganNo ratings yet
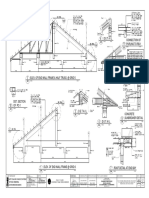
- Detail 6 Connection of Purlins To Rb-1 9Document1 pageDetail 6 Connection of Purlins To Rb-1 9Fritz NatividadNo ratings yet
- List of Companies With Contact Details For Global VillageDocument5 pagesList of Companies With Contact Details For Global VillagemadhutkNo ratings yet