Download as pdf or txt
You might also like
- IUB Format For ThesisDocument14 pagesIUB Format For Thesismuhammad_sarwar_2743% (7)
- AHM650 Ground Incident Damage Report Sheet 01-02 PDFDocument4 pagesAHM650 Ground Incident Damage Report Sheet 01-02 PDFNarablues IndonesiaNo ratings yet
- My Pizza OvenDocument41 pagesMy Pizza Ovensorrinalor100% (2)
- Load Flow StudiesDocument54 pagesLoad Flow Studiesk rajendra100% (1)
- Modelling A PV Module Using Matlab PDFDocument20 pagesModelling A PV Module Using Matlab PDFluysf548067% (3)
- PSSE 33.4 CrackDocument1 pagePSSE 33.4 Crackmuhammad_sarwar_27No ratings yet
- Visual Examination ProcedureDocument10 pagesVisual Examination Proceduresantanurini50% (2)
- Lecture 5 - Load Flow SolutionsDocument5 pagesLecture 5 - Load Flow Solutions12onn1eNo ratings yet
- EE 368 Lecture Notes-2011Document84 pagesEE 368 Lecture Notes-2011frimponge100% (3)
- The Power Flow Equations 1.0 The Admittance Matrix: Current Injections at A Bus Are Analogous To Power Injections. TheDocument29 pagesThe Power Flow Equations 1.0 The Admittance Matrix: Current Injections at A Bus Are Analogous To Power Injections. TheJose A. Regalado RojasNo ratings yet
- Power System Analysis: Transformers, Load & Generator Models, YbusDocument33 pagesPower System Analysis: Transformers, Load & Generator Models, YbusAhmedKhaledSalahNo ratings yet
- Load Flow Analysis: Semestral Project Ondrej Ivan C IkDocument5 pagesLoad Flow Analysis: Semestral Project Ondrej Ivan C IkOndrej IvančíkNo ratings yet
- List of ExperimentsDocument27 pagesList of ExperimentssangeetadineshNo ratings yet
- Formation of Jacobian Matrix: 1) X (N + N 1) - The DimensionsDocument4 pagesFormation of Jacobian Matrix: 1) X (N + N 1) - The DimensionsSampurna DasNo ratings yet
- 4994 Load Flow Analysis by Gauss-Seidel PDFDocument8 pages4994 Load Flow Analysis by Gauss-Seidel PDFMartin AwaseNo ratings yet
- PSA Chapter 2Document64 pagesPSA Chapter 2Barkhad MohamedNo ratings yet
- Newton Raphson & JacobiDocument21 pagesNewton Raphson & Jacobimadhes14No ratings yet
- A Review On Load Flow Studies FinalDocument46 pagesA Review On Load Flow Studies FinalTesfahun Girma100% (1)
- Newton-Raphson State Estimation Solution Employing Systematically Constructed Jacobian MatrixDocument5 pagesNewton-Raphson State Estimation Solution Employing Systematically Constructed Jacobian MatrixMuhudin Mohammed SemanNo ratings yet
- Instantaneus Power TheoromDocument5 pagesInstantaneus Power TheoromAlok Bikash SadangiNo ratings yet
- Subject-Power System 2 Subject Code - 3EE11 Faculty - Ajay Patel SirDocument60 pagesSubject-Power System 2 Subject Code - 3EE11 Faculty - Ajay Patel SirVismay ThackerNo ratings yet
- CAPA Chapter 2Document109 pagesCAPA Chapter 2daveadeNo ratings yet
- Power Sysem Analysis 2: Rns Institute of Technology BangaloreDocument44 pagesPower Sysem Analysis 2: Rns Institute of Technology BangaloreRachitha RNo ratings yet
- Lab Manual EE336 - Spring 2022 Exp 1Document8 pagesLab Manual EE336 - Spring 2022 Exp 1absNo ratings yet
- Chapter - 2 Power Flow AnalysisDocument24 pagesChapter - 2 Power Flow AnalysisdivyaNo ratings yet
- Ijeev9n2 01 PDFDocument12 pagesIjeev9n2 01 PDFHAMID 01No ratings yet
- Ee3008 Ps-II Lab Manual 2Document25 pagesEe3008 Ps-II Lab Manual 2Swapnil Gade007No ratings yet
- Power Flow AnalysisDocument11 pagesPower Flow AnalysisPradeep RajasekeranNo ratings yet
- PE351 Lect9 2020Document26 pagesPE351 Lect9 2020Abdul RazzaqNo ratings yet
- Power Systems - Basic ConceptsDocument50 pagesPower Systems - Basic ConceptskhaireddinNo ratings yet
- Module 1Document20 pagesModule 1Taha MohammedNo ratings yet
- Ee 258 Load-Flow Studies: Lecturer: Ambrosio T. Magtajas Nod-Mso, NGCPDocument33 pagesEe 258 Load-Flow Studies: Lecturer: Ambrosio T. Magtajas Nod-Mso, NGCPRovick Tarife67% (3)
- Study Notes On Load Flow Analysis For Electrical Engineering StudentsDocument18 pagesStudy Notes On Load Flow Analysis For Electrical Engineering StudentsSangodiji Akinwale Isaac100% (1)
- PEpract OcrDocument11 pagesPEpract OcrPiyush Ranjan SinghNo ratings yet
- Power Flow AnalysisDocument39 pagesPower Flow AnalysisDemelash BekeleNo ratings yet
- Lect 08Document4 pagesLect 08eswar110582No ratings yet
- International Journal of Engineering Research and Development (IJERD)Document9 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- A Feedback Linearization Based Control Strategy For VSC-HVDC Transmission ConvertersDocument10 pagesA Feedback Linearization Based Control Strategy For VSC-HVDC Transmission ConvertersĐỗ TrườngNo ratings yet
- Grid Calculation With Decentralised Generation Calculation MethodsDocument34 pagesGrid Calculation With Decentralised Generation Calculation MethodsYasinNo ratings yet
- Load Flow AnalysisDocument12 pagesLoad Flow AnalysisHendra Dwi RamadhanNo ratings yet
- Lecture 11 - Power-Flow StudiesDocument14 pagesLecture 11 - Power-Flow Studiessandeepmalik22No ratings yet
- Load FlowDocument42 pagesLoad FlowTahir KedirNo ratings yet
- Notes On Power System Load Flow Analysis Using An Excel WorkbookDocument20 pagesNotes On Power System Load Flow Analysis Using An Excel WorkbookkittuNo ratings yet
- Lecture 11 - Power-Flow StudiesDocument28 pagesLecture 11 - Power-Flow StudiesVipin WilfredNo ratings yet
- Base (Reference) PaperDocument7 pagesBase (Reference) Papermphaniteja2012No ratings yet
- Power System Analysis: Transformers, Load & Generator Models, YbusDocument34 pagesPower System Analysis: Transformers, Load & Generator Models, YbusOladeji Ifedayo RNo ratings yet
- Stability 2Document31 pagesStability 2Fengxing ZhuNo ratings yet
- ECE 476 Power System Analysis: Lecture 11: Ybus, Power FlowDocument32 pagesECE 476 Power System Analysis: Lecture 11: Ybus, Power FlowFady MichealNo ratings yet
- Optimum Power Flow Analysis by Newton Raphson Method, A Case StudyDocument9 pagesOptimum Power Flow Analysis by Newton Raphson Method, A Case StudyNurul Ain RosdiNo ratings yet
- New Contributions To Load Flow Studies by The Method of Reduction and RestorationDocument7 pagesNew Contributions To Load Flow Studies by The Method of Reduction and RestorationncleninNo ratings yet
- 08 EE394J 2 Spring12 LoadflowDocument15 pages08 EE394J 2 Spring12 LoadflowkgskgmNo ratings yet
- Lecture 11 - Power-Flow StudiesDocument28 pagesLecture 11 - Power-Flow StudiesdhanunjayudunasikaNo ratings yet
- A, B C j ∈ m τ ∈ (0 ≤ τ ≤ τ ≤ ≤ τ j ∈Document3 pagesA, B C j ∈ m τ ∈ (0 ≤ τ ≤ τ ≤ ≤ τ j ∈Originall LozanoNo ratings yet
- 1-Power Systems ModelingDocument23 pages1-Power Systems ModelingFady MichealNo ratings yet
- Unit 2Document100 pagesUnit 2Mukesh 2004No ratings yet
- Psa QB 2016-2017 Questions OnlyDocument25 pagesPsa QB 2016-2017 Questions OnlykmohanadasseNo ratings yet
- Method For Load-Flow Solution of Radial Distribution NetworksDocument8 pagesMethod For Load-Flow Solution of Radial Distribution NetworksriyazNo ratings yet
- EE 368 Chapter 1 ModDocument93 pagesEE 368 Chapter 1 ModJames AnokyeNo ratings yet
- Formation of Ybus Martix by Using Direct PDFDocument5 pagesFormation of Ybus Martix by Using Direct PDFPower System Analysis-1No ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Pes TP TR81 PSRC WGC32 071520Document72 pagesPes TP TR81 PSRC WGC32 071520muhammad_sarwar_27No ratings yet
- Profile of Pakistani PHD Student - MIT Sloan Fall 2014 - BrightLink Prep Lahore, PakistanDocument3 pagesProfile of Pakistani PHD Student - MIT Sloan Fall 2014 - BrightLink Prep Lahore, Pakistanmuhammad_sarwar_27No ratings yet
- Overcurrent Relay - Theoretical Concepts & Design in SimulinkDocument15 pagesOvercurrent Relay - Theoretical Concepts & Design in Simulinkmuhammad_sarwar_27No ratings yet
- Horizontal Axis Wind Turbine - Working Principle - EE Power School PDFDocument10 pagesHorizontal Axis Wind Turbine - Working Principle - EE Power School PDFmuhammad_sarwar_27No ratings yet
- Writing Minutes of Board MeetingsDocument2 pagesWriting Minutes of Board Meetingsmuhammad_sarwar_27No ratings yet
- Power System - Basic Structure and Functioning - EE Power SchoolDocument9 pagesPower System - Basic Structure and Functioning - EE Power Schoolmuhammad_sarwar_27No ratings yet
- CLO Technical CommunicationDocument1 pageCLO Technical Communicationmuhammad_sarwar_27No ratings yet
- Assignment On Minutes WritingDocument2 pagesAssignment On Minutes Writingmuhammad_sarwar_27No ratings yet
- Experiment No# 2: Study of Power Factor Correction On Hardware SystemDocument2 pagesExperiment No# 2: Study of Power Factor Correction On Hardware Systemmuhammad_sarwar_27No ratings yet
- Stage: Auditorium Seating Plan (Zeroeth Semester)Document1 pageStage: Auditorium Seating Plan (Zeroeth Semester)muhammad_sarwar_27No ratings yet
- Think You'Re Just 'Not Very Good' at Learning Languages - Wrong - World Economic ForumDocument5 pagesThink You'Re Just 'Not Very Good' at Learning Languages - Wrong - World Economic Forummuhammad_sarwar_27No ratings yet
- Experiment No# 2: Study of Power Factor Correction On Hardware SystemDocument2 pagesExperiment No# 2: Study of Power Factor Correction On Hardware Systemmuhammad_sarwar_27No ratings yet
- B400 Product SpecificationDocument2 pagesB400 Product SpecificationStephen RetzlaffNo ratings yet
- Peugeot Expert Tepee Range BrochureDocument20 pagesPeugeot Expert Tepee Range BrochurepeugeotUKNo ratings yet
- 84876283Document4 pages84876283homaNo ratings yet
- Module 9 (Human Factors) Sub Module 9.9 (Hazards in The Work Place)Document7 pagesModule 9 (Human Factors) Sub Module 9.9 (Hazards in The Work Place)falcon21152115No ratings yet
- Classes of FireDocument12 pagesClasses of FireMusharaf Shah100% (2)
- Project Report On BriquettingDocument11 pagesProject Report On BriquettingdilipNo ratings yet
- Tadano Faun GT 550E-2 Truck Crane Operator's & Maintenance Manual PDF-84-85Document2 pagesTadano Faun GT 550E-2 Truck Crane Operator's & Maintenance Manual PDF-84-85Ahmed El-FayoumyNo ratings yet
- SRX HA Deployment GuideDocument35 pagesSRX HA Deployment GuideCraig NetsNo ratings yet
- PhysicsDocument5 pagesPhysicsAnuNo ratings yet
- Factory Talk SE Alarmas y EventosDocument178 pagesFactory Talk SE Alarmas y EventosAlejandro Almonacid RivasNo ratings yet
- Isometric Layout Drawing Isometric Offsets Calculating Isometric Offsets Isometric Dimensioning & LabelingDocument18 pagesIsometric Layout Drawing Isometric Offsets Calculating Isometric Offsets Isometric Dimensioning & LabelingSuresh Ram RNo ratings yet
- Duresca Make Bus Bar Type AllDocument40 pagesDuresca Make Bus Bar Type AllMutaharZahidNo ratings yet
- Pipework Components - Definition and Selection of DN (Nominal Size) (ISO 6708:1995) Rörledningar - Nominell Storlek, DN (ISO 6708:1995)Document6 pagesPipework Components - Definition and Selection of DN (Nominal Size) (ISO 6708:1995) Rörledningar - Nominell Storlek, DN (ISO 6708:1995)white9013No ratings yet
- LA-3732P IBL80 Rev.0.1Document40 pagesLA-3732P IBL80 Rev.0.1Paco ChavesNo ratings yet
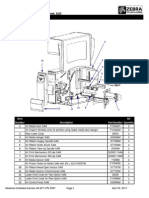
- S4m-En Part ManualDocument8 pagesS4m-En Part ManualGustavo Andrés Mardones NovaNo ratings yet
- Product ProgrammeDocument28 pagesProduct ProgrammePedro FernandesNo ratings yet
- FOGT - Subsea Flanges, Comparison Between Conventional API 6A & SPO CF DesignsDocument14 pagesFOGT - Subsea Flanges, Comparison Between Conventional API 6A & SPO CF DesignsEDWIN M.PNo ratings yet
- 1 EES Fatigue Testing Machine Is Used For Studying The Effects of Fatigue Using ADocument7 pages1 EES Fatigue Testing Machine Is Used For Studying The Effects of Fatigue Using AFrank.JNo ratings yet
- The T Motor Protector Is Designed To Protect Single PhaseDocument3 pagesThe T Motor Protector Is Designed To Protect Single PhaserayNo ratings yet
- IB HL - Resource ManagementDocument13 pagesIB HL - Resource Managementmedeck bruce100% (1)
- Guide Specification PowerWave 33-1Document11 pagesGuide Specification PowerWave 33-1ZIPDASHNo ratings yet
- Mathcad CMU WallDocument23 pagesMathcad CMU WallqimingzengNo ratings yet
- Custom Adapter Module DevelopmentDocument7 pagesCustom Adapter Module DevelopmentBikash Bhanu RoyNo ratings yet
- Honeywell l3000 Data SheetDocument2 pagesHoneywell l3000 Data SheetAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- Synopsis Front Page Thermal Power Plant PSM 1Document10 pagesSynopsis Front Page Thermal Power Plant PSM 1omkar nazare0% (1)
- DNSD 339 FDocument2 pagesDNSD 339 FrajeshdaveNo ratings yet
- Vega Admin Guide R85 v1.6 PDFDocument349 pagesVega Admin Guide R85 v1.6 PDF'Gustavo JuiNo ratings yet