
2-D URANS Vs - Experiments of Flow Induced Motion Softw o Circular Cylinders in Tandem With Passive Turbulence Control For 30,000oreo105,000
2-D URANS Vs - Experiments of Flow Induced Motion Softw o Circular Cylinders in Tandem With Passive Turbulence Control For 30,000oreo105,000
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The University of The South Pacific: School of Engineering and PhysicsDocument4 pagesThe University of The South Pacific: School of Engineering and PhysicsRoshiv Sharma0% (1)
- MODULE 2 - Hydraulics (Revised)Document36 pagesMODULE 2 - Hydraulics (Revised)Nicole Ann ArellanoNo ratings yet
- Dryness Fraction of Steam ExpDocument5 pagesDryness Fraction of Steam ExpAthinaNo ratings yet
- ResEngCh10 PDFDocument131 pagesResEngCh10 PDFweldsv50% (2)
- Modal Analysis of A Small Ship Sea Keeping Trial: A. Metcalfe L. Maurits T. Svenson R. Thach G. E. HearnDocument19 pagesModal Analysis of A Small Ship Sea Keeping Trial: A. Metcalfe L. Maurits T. Svenson R. Thach G. E. Hearnricky.pigazziniNo ratings yet
- Numerical Investigation of The Flow Around Two Circular Cylinders in TandemDocument11 pagesNumerical Investigation of The Flow Around Two Circular Cylinders in Tandemricky.pigazziniNo ratings yet
- Rowing DavisDocument6 pagesRowing Davisricky.pigazziniNo ratings yet
- A Ray Theory For Nonlinear Ship Waves and Wave Resistance YimDocument28 pagesA Ray Theory For Nonlinear Ship Waves and Wave Resistance Yimricky.pigazziniNo ratings yet
- GPS With Touch Screen, Turn-By-Turn and Voice PromptsDocument2 pagesGPS With Touch Screen, Turn-By-Turn and Voice Promptsricky.pigazziniNo ratings yet
- 6.9 Wave Forces On A Body: 2.20 - Marine Hydrodynamics, Fall 2008Document6 pages6.9 Wave Forces On A Body: 2.20 - Marine Hydrodynamics, Fall 2008ricky.pigazziniNo ratings yet
- Naca Arr l5f23Document56 pagesNaca Arr l5f23ricky.pigazziniNo ratings yet
- Wageningen B-Series ChartsDocument33 pagesWageningen B-Series ChartsMunteanu Sylvèr RobèrtNo ratings yet
- Introduction To Thermal RecoveryDocument49 pagesIntroduction To Thermal RecoveryShely RiveraNo ratings yet
- Leser EngineeringDocument439 pagesLeser EngineeringeimrehNo ratings yet
- Simulasi Waduk Sukaraja III, Kecamatan Margatiga, Kabupaten Lampung Timur Febrian Gatot Eko Susilo Endro P WahonoDocument16 pagesSimulasi Waduk Sukaraja III, Kecamatan Margatiga, Kabupaten Lampung Timur Febrian Gatot Eko Susilo Endro P WahonoQurratul 'AiniNo ratings yet
- Texaco Oil EquivalentsDocument32 pagesTexaco Oil EquivalentsMustafa100% (2)
- Sheet 8 (Cha (7,8) )Document2 pagesSheet 8 (Cha (7,8) )chemicalengineering321No ratings yet
- Natural Gas Regulator Grove 83Document5 pagesNatural Gas Regulator Grove 83montanovillarroelfabiolalourdeNo ratings yet
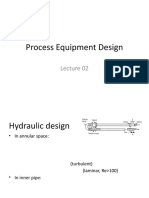
- Process Equipment Design-02Document22 pagesProcess Equipment Design-02PARAG DAHARWAL 20CH10020No ratings yet
- Fundamentals of Gas Turbine Meters Robert Bennett American Meter CompanyDocument6 pagesFundamentals of Gas Turbine Meters Robert Bennett American Meter CompanysaadisdkNo ratings yet
- Agip F.1 Super Motor OilDocument2 pagesAgip F.1 Super Motor OilwindiNo ratings yet
- Full TextDocument8 pagesFull TextSiddharth MurarkaNo ratings yet
- Discharge Through BridgeDocument2 pagesDischarge Through Bridgesirkali1973No ratings yet
- Hydraulics - Graphic Symbols ValvesDocument1 pageHydraulics - Graphic Symbols ValvesJairoHernanLoperaNo ratings yet
- Unistrut Uniper Pipe Support SystemsDocument24 pagesUnistrut Uniper Pipe Support SystemsmolinachNo ratings yet
- OzLinc Product CatalogueDocument192 pagesOzLinc Product CatalogueKarenNo ratings yet
- Studi Korelasi Koefisien Permeabilitas Vertikal Dan Permeabilitas Horizontal Pada Tanah LempungDocument11 pagesStudi Korelasi Koefisien Permeabilitas Vertikal Dan Permeabilitas Horizontal Pada Tanah LempungGyan D RenNo ratings yet
- Module No. 4Document7 pagesModule No. 4The one guyNo ratings yet
- Orifice Plate Calculator PRDocument3 pagesOrifice Plate Calculator PRredroom31100% (1)
- Piping Material ListDocument1 pagePiping Material ListidilfitriNo ratings yet
- Heat and Mass Transfer1Document173 pagesHeat and Mass Transfer1Subramanian ChidambaramNo ratings yet
- Parametric Study of Volutes For Optimal Centrifugal Fan ImpellersDocument13 pagesParametric Study of Volutes For Optimal Centrifugal Fan ImpellersphyominkoNo ratings yet
- Sheet 1Document2 pagesSheet 1Ahmed NabilNo ratings yet
- Assignment 3Document3 pagesAssignment 3Vandit GoyalNo ratings yet
- Lecture Notes Mixing PFFL101 For 2020 MCDocument20 pagesLecture Notes Mixing PFFL101 For 2020 MCAnele HadebeNo ratings yet
- Project Report of POL Terminals2 PDFDocument31 pagesProject Report of POL Terminals2 PDFRashmi RanjanNo ratings yet
- RAR OCP - Uleiuri Motor Marca PRISTA Si VERILA Anexa Pentru Cererea de Recertificare Nr. .......Document3 pagesRAR OCP - Uleiuri Motor Marca PRISTA Si VERILA Anexa Pentru Cererea de Recertificare Nr. .......Svilen VasilevNo ratings yet
- Instrucciones Mantenimiento GPW-3000Document14 pagesInstrucciones Mantenimiento GPW-3000tecknotron2072100% (1)













































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The University of The South Pacific: School of Engineering and PhysicsDocument4 pagesThe University of The South Pacific: School of Engineering and PhysicsRoshiv Sharma0% (1)
- MODULE 2 - Hydraulics (Revised)Document36 pagesMODULE 2 - Hydraulics (Revised)Nicole Ann ArellanoNo ratings yet
- Dryness Fraction of Steam ExpDocument5 pagesDryness Fraction of Steam ExpAthinaNo ratings yet
- ResEngCh10 PDFDocument131 pagesResEngCh10 PDFweldsv50% (2)
- Modal Analysis of A Small Ship Sea Keeping Trial: A. Metcalfe L. Maurits T. Svenson R. Thach G. E. HearnDocument19 pagesModal Analysis of A Small Ship Sea Keeping Trial: A. Metcalfe L. Maurits T. Svenson R. Thach G. E. Hearnricky.pigazziniNo ratings yet
- Numerical Investigation of The Flow Around Two Circular Cylinders in TandemDocument11 pagesNumerical Investigation of The Flow Around Two Circular Cylinders in Tandemricky.pigazziniNo ratings yet
- Rowing DavisDocument6 pagesRowing Davisricky.pigazziniNo ratings yet
- A Ray Theory For Nonlinear Ship Waves and Wave Resistance YimDocument28 pagesA Ray Theory For Nonlinear Ship Waves and Wave Resistance Yimricky.pigazziniNo ratings yet
- GPS With Touch Screen, Turn-By-Turn and Voice PromptsDocument2 pagesGPS With Touch Screen, Turn-By-Turn and Voice Promptsricky.pigazziniNo ratings yet
- 6.9 Wave Forces On A Body: 2.20 - Marine Hydrodynamics, Fall 2008Document6 pages6.9 Wave Forces On A Body: 2.20 - Marine Hydrodynamics, Fall 2008ricky.pigazziniNo ratings yet
- Naca Arr l5f23Document56 pagesNaca Arr l5f23ricky.pigazziniNo ratings yet
- Wageningen B-Series ChartsDocument33 pagesWageningen B-Series ChartsMunteanu Sylvèr RobèrtNo ratings yet
- Introduction To Thermal RecoveryDocument49 pagesIntroduction To Thermal RecoveryShely RiveraNo ratings yet
- Leser EngineeringDocument439 pagesLeser EngineeringeimrehNo ratings yet
- Simulasi Waduk Sukaraja III, Kecamatan Margatiga, Kabupaten Lampung Timur Febrian Gatot Eko Susilo Endro P WahonoDocument16 pagesSimulasi Waduk Sukaraja III, Kecamatan Margatiga, Kabupaten Lampung Timur Febrian Gatot Eko Susilo Endro P WahonoQurratul 'AiniNo ratings yet
- Texaco Oil EquivalentsDocument32 pagesTexaco Oil EquivalentsMustafa100% (2)
- Sheet 8 (Cha (7,8) )Document2 pagesSheet 8 (Cha (7,8) )chemicalengineering321No ratings yet
- Natural Gas Regulator Grove 83Document5 pagesNatural Gas Regulator Grove 83montanovillarroelfabiolalourdeNo ratings yet
- Process Equipment Design-02Document22 pagesProcess Equipment Design-02PARAG DAHARWAL 20CH10020No ratings yet
- Fundamentals of Gas Turbine Meters Robert Bennett American Meter CompanyDocument6 pagesFundamentals of Gas Turbine Meters Robert Bennett American Meter CompanysaadisdkNo ratings yet
- Agip F.1 Super Motor OilDocument2 pagesAgip F.1 Super Motor OilwindiNo ratings yet
- Full TextDocument8 pagesFull TextSiddharth MurarkaNo ratings yet
- Discharge Through BridgeDocument2 pagesDischarge Through Bridgesirkali1973No ratings yet
- Hydraulics - Graphic Symbols ValvesDocument1 pageHydraulics - Graphic Symbols ValvesJairoHernanLoperaNo ratings yet
- Unistrut Uniper Pipe Support SystemsDocument24 pagesUnistrut Uniper Pipe Support SystemsmolinachNo ratings yet
- OzLinc Product CatalogueDocument192 pagesOzLinc Product CatalogueKarenNo ratings yet
- Studi Korelasi Koefisien Permeabilitas Vertikal Dan Permeabilitas Horizontal Pada Tanah LempungDocument11 pagesStudi Korelasi Koefisien Permeabilitas Vertikal Dan Permeabilitas Horizontal Pada Tanah LempungGyan D RenNo ratings yet
- Module No. 4Document7 pagesModule No. 4The one guyNo ratings yet
- Orifice Plate Calculator PRDocument3 pagesOrifice Plate Calculator PRredroom31100% (1)
- Piping Material ListDocument1 pagePiping Material ListidilfitriNo ratings yet
- Heat and Mass Transfer1Document173 pagesHeat and Mass Transfer1Subramanian ChidambaramNo ratings yet
- Parametric Study of Volutes For Optimal Centrifugal Fan ImpellersDocument13 pagesParametric Study of Volutes For Optimal Centrifugal Fan ImpellersphyominkoNo ratings yet
- Sheet 1Document2 pagesSheet 1Ahmed NabilNo ratings yet
- Assignment 3Document3 pagesAssignment 3Vandit GoyalNo ratings yet
- Lecture Notes Mixing PFFL101 For 2020 MCDocument20 pagesLecture Notes Mixing PFFL101 For 2020 MCAnele HadebeNo ratings yet
- Project Report of POL Terminals2 PDFDocument31 pagesProject Report of POL Terminals2 PDFRashmi RanjanNo ratings yet
- RAR OCP - Uleiuri Motor Marca PRISTA Si VERILA Anexa Pentru Cererea de Recertificare Nr. .......Document3 pagesRAR OCP - Uleiuri Motor Marca PRISTA Si VERILA Anexa Pentru Cererea de Recertificare Nr. .......Svilen VasilevNo ratings yet
- Instrucciones Mantenimiento GPW-3000Document14 pagesInstrucciones Mantenimiento GPW-3000tecknotron2072100% (1)