Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- CMC-Testing of Restricted Earth Fault Protection With OMICRON Advanced DifferentialDocument12 pagesCMC-Testing of Restricted Earth Fault Protection With OMICRON Advanced Differentialskylimit.skylimit100% (4)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Final Project ReportDocument47 pagesFinal Project ReportShashank Dubey100% (1)
- MATLAB Course Session 1 Introduction To Modelling and SimulationDocument59 pagesMATLAB Course Session 1 Introduction To Modelling and SimulationMahamod IsmailNo ratings yet
- The UFO Evidence - Richard H. HallDocument342 pagesThe UFO Evidence - Richard H. HallCarlos Rodriguez100% (2)
- 6615 LowSecondHarmonic BK 20140210 WebDocument20 pages6615 LowSecondHarmonic BK 20140210 Webskylimit.skylimitNo ratings yet
- Settings Considerations For Distance Elements in Line Protection ApplicationsDocument25 pagesSettings Considerations For Distance Elements in Line Protection Applicationsskylimit.skylimitNo ratings yet
- Datasheet of 5VT1 CableDocument2 pagesDatasheet of 5VT1 Cableskylimit.skylimitNo ratings yet
- Comparing Power Transformer Turn-to-Turn FaultsDocument9 pagesComparing Power Transformer Turn-to-Turn Faultsskylimit.skylimitNo ratings yet
- Mutual Coupling Compensation Techniques Used For Distance Protection of Parallel LinesDocument15 pagesMutual Coupling Compensation Techniques Used For Distance Protection of Parallel Linesskylimit.skylimitNo ratings yet
- Mi454an MISDocument3 pagesMi454an MISskylimit.skylimitNo ratings yet
- Analysis of Oltc of Parallel TransformersDocument31 pagesAnalysis of Oltc of Parallel Transformersskylimit.skylimitNo ratings yet
- Cable Sheath Bonding Application Guide Companion PDFDocument45 pagesCable Sheath Bonding Application Guide Companion PDFskylimit.skylimitNo ratings yet
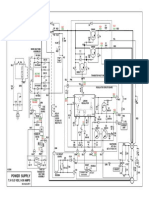
- Power Supply ShematicDocument1 pagePower Supply Shematicskylimit.skylimit100% (1)
- Power Supply ShemeDocument1 pagePower Supply Shemeskylimit.skylimitNo ratings yet
- Weight-Volume RelationshipDocument3 pagesWeight-Volume RelationshipAndrich Rey CortesNo ratings yet
- PoloniumDocument20 pagesPoloniumKosuke IchinichiNo ratings yet
- Weld DesignDocument51 pagesWeld DesignJoseph Booker100% (1)
- Assignment 3 (Health Insurance) by Anmol (1920983013)Document4 pagesAssignment 3 (Health Insurance) by Anmol (1920983013)Tarun AroraNo ratings yet
- Sika RainTiteDocument2 pagesSika RainTiteRialno TambunanNo ratings yet
- Choke Flow CVDocument5 pagesChoke Flow CVpca97No ratings yet
- Renewable Energy PolicyDocument194 pagesRenewable Energy PolicysulemankhalidNo ratings yet
- Chapter 9: Mechanical Failure: Issues To Address..Document62 pagesChapter 9: Mechanical Failure: Issues To Address..badaboyNo ratings yet
- Free Energy GeneratorDocument18 pagesFree Energy GeneratorDeepakRajKurrey60% (5)
- Technical Writing Primer: Additional ResourcesDocument13 pagesTechnical Writing Primer: Additional ResourcesLuís Filipe SantosNo ratings yet
- Mechanics of Tractor BookDocument216 pagesMechanics of Tractor BookMohamad Nadzri YahayaNo ratings yet
- Lecture-1: Course Plan / OutlineDocument3 pagesLecture-1: Course Plan / OutlineNaiem IslamNo ratings yet
- June 2009 MS - Unit 1 Edexcel Chemistry A-LevelDocument28 pagesJune 2009 MS - Unit 1 Edexcel Chemistry A-LevelNabindra RuwaliNo ratings yet
- Force and Acceleration WSDocument2 pagesForce and Acceleration WSMIS NURUL IMAN JakbarNo ratings yet
- PETE 311 Lab 2 MemoDocument3 pagesPETE 311 Lab 2 MemoTyler MroskoNo ratings yet
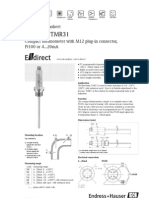
- 1.TMR 31Document2 pages1.TMR 31anader0lNo ratings yet
- Surface Chemistry in The Atomic Layer Deposition of TiN Films From TiCl4 and AmmoniaDocument8 pagesSurface Chemistry in The Atomic Layer Deposition of TiN Films From TiCl4 and AmmoniaThang NguyenNo ratings yet
- KNM GCSDocument2 pagesKNM GCSChris AntoniouNo ratings yet
- Soalan Set1Document13 pagesSoalan Set1Aziz BakarNo ratings yet
- Rak-50 3149 F. l6 - Drained Undrained AnalysisDocument43 pagesRak-50 3149 F. l6 - Drained Undrained AnalysisDedy DharmawansyahNo ratings yet
- Tim Wood Quant QA The Hard PartDocument42 pagesTim Wood Quant QA The Hard PartAlfonso Davide PinelliNo ratings yet
- Thermo 2Document12 pagesThermo 2katabayoob11No ratings yet
- (TDB) ERV For Europe (Nasa, 50Hz - 60Hz) - Ver.1.4Document17 pages(TDB) ERV For Europe (Nasa, 50Hz - 60Hz) - Ver.1.4carlo jose cortez montanoNo ratings yet
- Radiometric Correction and Calibration of SAR ImagesDocument7 pagesRadiometric Correction and Calibration of SAR ImagesSimone MeschinoNo ratings yet
- Blackmer CompressorsDocument4 pagesBlackmer CompressorsBesan LaduNo ratings yet
- Response of Hollow-Core Slab Floors To Concentrated LoadsDocument16 pagesResponse of Hollow-Core Slab Floors To Concentrated LoadsJuan Carlos GonzálezNo ratings yet
- AO202 Aerodynamics - IDocument2 pagesAO202 Aerodynamics - IVIGNESH RAJNo ratings yet