Download as docx, pdf, or txt
You might also like
- EV1 SCR Motor ControllerDocument32 pagesEV1 SCR Motor ControllerJShearer95% (20)
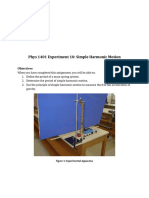
- Phys 1401 Experiment 10 Simple Harmonic Motion COmpletedDocument15 pagesPhys 1401 Experiment 10 Simple Harmonic Motion COmpletedAsaad iqbalNo ratings yet
- Lab 125 Darshan PatelDocument4 pagesLab 125 Darshan PatelDarshan PatelNo ratings yet
- Triple PendulumDocument9 pagesTriple PendulumSalvador SilveyraNo ratings yet
- Ecs 03 0054 Connection of LV Large Services To Secondary Distribution SubstationsDocument23 pagesEcs 03 0054 Connection of LV Large Services To Secondary Distribution SubstationsRadulescu AndreiNo ratings yet
- VibracionesDocument14 pagesVibracionesFernando LopezNo ratings yet
- Physics - Spring Oscillations LabDocument9 pagesPhysics - Spring Oscillations LabsalochinNo ratings yet
- Spring Oscillator Lab ReportDocument10 pagesSpring Oscillator Lab ReportVincent Vuong100% (2)
- Free Harmonic Oscillations Formal Report EditedDocument9 pagesFree Harmonic Oscillations Formal Report EditedPassionFruitBowlNo ratings yet
- Formal Report Lab 1Document11 pagesFormal Report Lab 1Mohan RyanNo ratings yet
- Experiment 1Document11 pagesExperiment 1Nurul Anati ZulkifliNo ratings yet
- Sonnenschein 1986 5Document3 pagesSonnenschein 1986 5niko_sonnenscheinNo ratings yet
- Lab 1: SDOF Spring-Mass Systems: ObjectiveDocument5 pagesLab 1: SDOF Spring-Mass Systems: ObjectiveTyranid hunterNo ratings yet
- NewtonssecondlawDocument10 pagesNewtonssecondlawapi-276881836No ratings yet
- PPS Project ReportDocument7 pagesPPS Project ReportRITIK JAINNo ratings yet
- 5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionDocument8 pages5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionHaridev MoorthyNo ratings yet
- 2014 ExercisesDocument8 pages2014 ExercisesElvir PecoNo ratings yet
- Simple Harmonic MotionDocument7 pagesSimple Harmonic MotionKen AkikiNo ratings yet
- 1984, A Molecular Dynamics Method For Simulations in The Canonical Ensemblet by SHUICHI NOSEDocument14 pages1984, A Molecular Dynamics Method For Simulations in The Canonical Ensemblet by SHUICHI NOSEAnatoli KrasilnikovNo ratings yet
- Experiment Labview ArduinoDocument7 pagesExperiment Labview ArduinoLuca AlbertiNo ratings yet
- Mechanical Physical Laboratory Practices Year 2018Document50 pagesMechanical Physical Laboratory Practices Year 2018Miller PerezNo ratings yet
- Conservation of Linear Momentum Lab ReportDocument5 pagesConservation of Linear Momentum Lab ReportShang Divina Ebrada100% (3)
- Damping Lab 1Document60 pagesDamping Lab 1Robert Lau Yik SiangNo ratings yet
- Experiment Hooke' S Law: 1 Objectives of The ExperimentDocument11 pagesExperiment Hooke' S Law: 1 Objectives of The ExperimentHarjinder RoarNo ratings yet
- Simple Harmonic Motion Lab: K M T and M KDocument2 pagesSimple Harmonic Motion Lab: K M T and M Knio tistaNo ratings yet
- 16 Marks TovDocument13 pages16 Marks TovrenjithrenjuNo ratings yet
- SHM ReviewDocument2 pagesSHM ReviewShabbir H. KhanNo ratings yet
- Dynamic Systems Lab ReportDocument42 pagesDynamic Systems Lab ReportSachee Perera100% (6)
- Physics 232 Lab ReportDocument11 pagesPhysics 232 Lab ReportBrian CoghlanNo ratings yet
- Hooke's LawDocument15 pagesHooke's LawHisyamAl-Muhammadi100% (1)
- How To Write A Physics Lab Report - Revise PDFDocument18 pagesHow To Write A Physics Lab Report - Revise PDFTural UsubovNo ratings yet
- Introduction To Statistical Mechanics and A Two-Dimensional Ising ModelDocument50 pagesIntroduction To Statistical Mechanics and A Two-Dimensional Ising ModelTradingCLoudNo ratings yet
- Simple Pedulum Motion: General Physics Quastion SheetsDocument8 pagesSimple Pedulum Motion: General Physics Quastion SheetsShiun TungNo ratings yet
- Structural Dynamics: Force DT MV DDocument12 pagesStructural Dynamics: Force DT MV DrajNo ratings yet
- Notes On Mechanical Vibrations: 1 Masses and Springs-The Linear OscillatorDocument10 pagesNotes On Mechanical Vibrations: 1 Masses and Springs-The Linear Oscillatoramlandas08No ratings yet
- Dynamics of A Mass-Spring-Pendulum System With Vastly Different FrequenciesDocument6 pagesDynamics of A Mass-Spring-Pendulum System With Vastly Different FrequenciesvertugoNo ratings yet
- TALLER 1 Vibraciones LibresDocument11 pagesTALLER 1 Vibraciones LibresAlexis FlexyNo ratings yet
- Mechanical VibrationsDocument12 pagesMechanical VibrationsDhiyanesh WaranNo ratings yet
- Adv Lab OscillatorsDocument12 pagesAdv Lab OscillatorsPeter John BolgertNo ratings yet
- Lab 4 Mass-Spring System - v3Document13 pagesLab 4 Mass-Spring System - v3sairafiNo ratings yet
- Free Harmonic Oscillations Formal Report UploadDocument9 pagesFree Harmonic Oscillations Formal Report UploadPassionFruitBowlNo ratings yet
- TALLER 1 Vibraciones LibresDocument11 pagesTALLER 1 Vibraciones LibresPortugal SergioNo ratings yet
- MEC424-Vibration: Oscillations Periodic RandomDocument6 pagesMEC424-Vibration: Oscillations Periodic RandomBilly JohnsonNo ratings yet
- Title: Natural Frequency of Spring Mass System Without DampingDocument15 pagesTitle: Natural Frequency of Spring Mass System Without DampingTorentox OctopusNo ratings yet
- Divisi N-VibracionesDocument12 pagesDivisi N-VibracionesDaniel MoraNo ratings yet
- Physics Lab 7 - EnergyDocument3 pagesPhysics Lab 7 - EnergylaureanojimmyNo ratings yet
- Damped Harmonic MotionDocument6 pagesDamped Harmonic MotionIan MumwayaNo ratings yet
- FVEG For Hyperbolic SystemsDocument29 pagesFVEG For Hyperbolic SystemsAnand MaltoNo ratings yet
- Report PDFDocument5 pagesReport PDFjacobNo ratings yet
- Study of Forced Double PendulumsDocument17 pagesStudy of Forced Double PendulumsrizkibiznizNo ratings yet
- Coupled Masses and Modes of Oscillation: Todd Crutcher June 10, 2003Document15 pagesCoupled Masses and Modes of Oscillation: Todd Crutcher June 10, 2003Julian David Henao EscobarNo ratings yet
- Vibration Analysis - Approximate Methods: Unit 4 - ContinuationDocument29 pagesVibration Analysis - Approximate Methods: Unit 4 - ContinuationAdrian ArasuNo ratings yet
- Bifilar and Trifilar ReportDocument43 pagesBifilar and Trifilar ReportHasan Seleem100% (1)
- Limitation Imposed On Structural DesignerDocument2 pagesLimitation Imposed On Structural DesignerdvarsastryNo ratings yet
- Physics 2nd Assignment Deney Harmonic MothionDocument4 pagesPhysics 2nd Assignment Deney Harmonic MothionMohammad AlsmadiNo ratings yet
- Beyond Landauer ErasureDocument13 pagesBeyond Landauer ErasureJoanVaccaroNo ratings yet
- On Feedback Control of Chaotic Continuous-Time Systems: Senior Member, IEEE, Student Member, IEEEDocument11 pagesOn Feedback Control of Chaotic Continuous-Time Systems: Senior Member, IEEE, Student Member, IEEEAnu AliyasNo ratings yet
- Ondas DinâmicasDocument16 pagesOndas DinâmicasivyjeannNo ratings yet
- I1. S.H.M. Estudy of The Mass-Spring System and Analysis of Oscillation With Cassy-LabDocument14 pagesI1. S.H.M. Estudy of The Mass-Spring System and Analysis of Oscillation With Cassy-LabSergio Lozano MijaresNo ratings yet
- HSC Physics Practical 1Document7 pagesHSC Physics Practical 1Jonathan ChanNo ratings yet
- Discussion of The Improved Methods For Analyzing ADocument16 pagesDiscussion of The Improved Methods For Analyzing ASudheer Reddy TenaliNo ratings yet
- 2012 Fuelmaker CatalogueDocument31 pages2012 Fuelmaker CataloguedlseymourNo ratings yet
- 2ruun Biomechanics and Motor Control of Human Movement Fourth EditionDocument383 pages2ruun Biomechanics and Motor Control of Human Movement Fourth EditionTom Tampon100% (1)
- National Stock Exchange India LTD: BSE Limited ofDocument301 pagesNational Stock Exchange India LTD: BSE Limited ofraja rajanNo ratings yet
- Pipeline RoutingDocument5 pagesPipeline RoutingSaid Ahmed SalemNo ratings yet
- Miniature Circuit Breakers Catalog 1 Uvr STRDocument14 pagesMiniature Circuit Breakers Catalog 1 Uvr STRmyselfashinthedarkNo ratings yet
- Vpa Public Address Amplifiers: Installation & Service ManualDocument22 pagesVpa Public Address Amplifiers: Installation & Service ManualIlija GrozdanovicNo ratings yet
- K20 Engine Control Module X3Document4 pagesK20 Engine Control Module X3Data TécnicaNo ratings yet
- Pet Engineering College Department of Mechanical EngineeringDocument3 pagesPet Engineering College Department of Mechanical EngineeringAHAMED SULBIHAR MNo ratings yet
- HTWL Service Manual: Failure ListDocument2 pagesHTWL Service Manual: Failure ListClaudio Valencia MarínNo ratings yet
- Tanks Prestressed Concrete PDFDocument7 pagesTanks Prestressed Concrete PDFAnonymous laHDd9soNo ratings yet
- Skymark Vac8 25t Engineering Guide PDFDocument16 pagesSkymark Vac8 25t Engineering Guide PDFBraulio Ramón PeñaNo ratings yet
- Cogen 3 Technical Financial Analysis ModelDocument58 pagesCogen 3 Technical Financial Analysis ModelLai Mei EeNo ratings yet
- LPK 909ex Bs-Iii: (Parts List)Document216 pagesLPK 909ex Bs-Iii: (Parts List)shivamNo ratings yet
- Data Sheet Co2 Cylinder AssemblyDocument2 pagesData Sheet Co2 Cylinder AssemblyPinjala AnoopNo ratings yet
- Keller-Jet GroutDocument11 pagesKeller-Jet GroutrecepsenNo ratings yet
- CAC Energy Efficiency and Housing 10.16.20 FINALDocument22 pagesCAC Energy Efficiency and Housing 10.16.20 FINALOANo ratings yet
- Afspdcl-?Atz-: Andidate L (Document21 pagesAfspdcl-?Atz-: Andidate L (shaktiNo ratings yet
- Harshitha Energy Systems: MR K A Anand Kumar Garu KakinadaDocument3 pagesHarshitha Energy Systems: MR K A Anand Kumar Garu KakinadaLizzi JNo ratings yet
- Classwork On Photosynthesis Cellular Respiration and FermentationDocument3 pagesClasswork On Photosynthesis Cellular Respiration and Fermentationapi-272124446100% (1)
- STS Midterm Exam All PartsDocument27 pagesSTS Midterm Exam All PartsTomiwa FaithNo ratings yet
- Test Bank For Organic Chemistry 7th Edition BrownDocument21 pagesTest Bank For Organic Chemistry 7th Edition Browna157293279No ratings yet
- CH 05Document40 pagesCH 05miathegirl9No ratings yet
- Iit Jee Advance Mock PaperDocument11 pagesIit Jee Advance Mock Papergaurav gargNo ratings yet
- SIT - Ajutaj 1Document8 pagesSIT - Ajutaj 1gvisanNo ratings yet
- Pressure EnthalpyDocument9 pagesPressure Enthalpypunk cmNo ratings yet
- The Science of NASCARDocument2 pagesThe Science of NASCARBurhanMalikNo ratings yet
- DS6213 Standard EU enDocument5 pagesDS6213 Standard EU enwinwin2302No ratings yet
- Rotating Face Mechanical SealsDocument3 pagesRotating Face Mechanical SealsSufi Lord NewNo ratings yet