Download as pdf or txt
You might also like
- Calculation of The Crosshead Velocity Required To Achieve A Specified Stress Rate or An Estimated Strain RateDocument9 pagesCalculation of The Crosshead Velocity Required To Achieve A Specified Stress Rate or An Estimated Strain Ratemp87_ing100% (1)
- Electronic JacquardDocument2 pagesElectronic JacquardAshiksajjat75% (4)
- 14 Momentum ImpulseDocument4 pages14 Momentum ImpulseeltytanNo ratings yet
- Kathmandu University: Department of Mechanical EngineeringDocument2 pagesKathmandu University: Department of Mechanical Engineeringabdata wakjiraNo ratings yet
- Navier - Stokes Equation PDFDocument10 pagesNavier - Stokes Equation PDFanagha sreenivasamNo ratings yet
- All ProblemsDocument107 pagesAll ProblemsjoshiabhijeetNo ratings yet
- Assignment 1Document1 pageAssignment 1Partha SurveNo ratings yet
- Chapter 3 Truss ElementsDocument19 pagesChapter 3 Truss Elementsanoop asokanNo ratings yet
- Continuum MechanicsDocument410 pagesContinuum MechanicsAnonymous eCD5ZRNo ratings yet
- 3D Stress Components: Normal StressesDocument71 pages3D Stress Components: Normal Stressesengr_usman04No ratings yet
- Solved Mechanical-Engineering-Paper-I PDFDocument54 pagesSolved Mechanical-Engineering-Paper-I PDFSumit BhNo ratings yet
- III-Basics of Continuum Mechanics-StressDocument22 pagesIII-Basics of Continuum Mechanics-StressMirza Muneeb AhsanNo ratings yet
- Aae556 HW#2Document8 pagesAae556 HW#2venkatNo ratings yet
- Exercises Fourier SeriesDocument3 pagesExercises Fourier SeriesZaid Al-AliNo ratings yet
- Finite Strain TheoryDocument19 pagesFinite Strain TheorySnehasish BhattacharjeeNo ratings yet
- CM Exam 2015dec21Document9 pagesCM Exam 2015dec21sepehrNo ratings yet
- FEM L1 (C)Document27 pagesFEM L1 (C)zinilNo ratings yet
- Homework Problems For Chapter 2 Problem 2.1: B e K KDocument9 pagesHomework Problems For Chapter 2 Problem 2.1: B e K KB K LNo ratings yet
- Deformation PDFDocument66 pagesDeformation PDFRicardo ColosimoNo ratings yet
- Expansion Wave Prandti - MEDDocument10 pagesExpansion Wave Prandti - MEDMohammed SalmanNo ratings yet
- Couples: Chapter Two Force SystemDocument8 pagesCouples: Chapter Two Force SystemabasNo ratings yet
- Homework 8Document3 pagesHomework 8Arthur DingNo ratings yet
- Statics and Strength of Materials Formula SheetDocument1 pageStatics and Strength of Materials Formula SheetRichard TsengNo ratings yet
- Gupta Vol 1Document611 pagesGupta Vol 1aebsdNo ratings yet
- Finite Elements For The (Navier) Stokes EquationsDocument61 pagesFinite Elements For The (Navier) Stokes EquationschrissbansNo ratings yet
- Chapter 7 Analysis of Stress and StrainDocument18 pagesChapter 7 Analysis of Stress and StrainMohammad Asif KabirNo ratings yet
- Fluid Dynamics PDFDocument11 pagesFluid Dynamics PDFrgcsm88100% (1)
- Homework 5Document2 pagesHomework 5Arthur DingNo ratings yet
- Finite Element MethodsDocument14 pagesFinite Element MethodspriyaankNo ratings yet
- Lecture 3Document15 pagesLecture 3ansgcekNo ratings yet
- ElasticityDocument8 pagesElasticityGuru GuroNo ratings yet
- Me2353 Finite Element Analysis 16 MarksDocument16 pagesMe2353 Finite Element Analysis 16 MarksEkantha Moorthy0% (1)
- Rotating PendulumDocument12 pagesRotating Pendulumjerome meccaNo ratings yet
- 2 Conduction Tutorial 1Document11 pages2 Conduction Tutorial 1GnazGoragod100% (1)
- FEM Higher Order ElementsDocument28 pagesFEM Higher Order Elementsjoshibec100% (1)
- Differential Equations - Solved Assignments - Semester Spring 2005Document60 pagesDifferential Equations - Solved Assignments - Semester Spring 2005Muhammad Umair100% (1)
- Understanding Stress and StrainDocument47 pagesUnderstanding Stress and StrainSachin BanerjiNo ratings yet
- 3-d ElasticityDocument40 pages3-d Elasticityp_sahoo8686No ratings yet
- Drawing A Lumley TriangleDocument4 pagesDrawing A Lumley TrianglegoldenthangamNo ratings yet
- Cauchy Stress TensorDocument15 pagesCauchy Stress TensorPrantik Adhar SamantaNo ratings yet
- MA6351-Transforms and Partial Differential EquationDocument10 pagesMA6351-Transforms and Partial Differential EquationmohanNo ratings yet
- Engineering Mechanics: StaticsDocument31 pagesEngineering Mechanics: Statics재인디디No ratings yet
- Fatigue Failure CriteriaDocument17 pagesFatigue Failure CriteriaAmrMashhourNo ratings yet
- Tensile TestingDocument10 pagesTensile TestingOsama Ahmed OfficialNo ratings yet
- 01 Continuum MechanicsDocument2 pages01 Continuum MechanicsHernan Vega0% (1)
- Stress Transformation and Circular Beam Under Combined LoadingDocument11 pagesStress Transformation and Circular Beam Under Combined Loadingkostas.sierros9374No ratings yet
- Strain Chap 04Document37 pagesStrain Chap 04Ricardo ColosimoNo ratings yet
- Engineering Mathematics Ii MA-2001: Dr. Umber SheikhDocument66 pagesEngineering Mathematics Ii MA-2001: Dr. Umber Sheikhaswar teknikNo ratings yet
- Structural Dynamics - Mock ExamDocument4 pagesStructural Dynamics - Mock Examgen ridanNo ratings yet
- Chapter 5 Airy Stress FunctionDocument19 pagesChapter 5 Airy Stress FunctionGilang Farhan Ramadhan MulyadiNo ratings yet
- Navier Stokes PDFDocument22 pagesNavier Stokes PDFKhirupasagar RavibaskarNo ratings yet
- Fluid MechanicsDocument5 pagesFluid MechanicsAkash SoniNo ratings yet
- ES 11 Formula Sheet v1Document3 pagesES 11 Formula Sheet v1Sam RuelosNo ratings yet
- Lecture Notes (Chapter 2.5 Application of Multiple Integral)Document12 pagesLecture Notes (Chapter 2.5 Application of Multiple Integral)shinee_jayasila2080No ratings yet
- Lec 13 - Variation of ParametersDocument22 pagesLec 13 - Variation of ParametersJege Mongcal JavierNo ratings yet
- Conjugate Beam Method SLUDocument41 pagesConjugate Beam Method SLULydia D. GalinganNo ratings yet
- Solid MechanicsDocument117 pagesSolid MechanicsOluwaseun Awe67% (3)
- Nonlinear Ordinary Differential Equations in Transport ProcessesFrom EverandNonlinear Ordinary Differential Equations in Transport ProcessesNo ratings yet
- Cauchy Stress Tensor WikiDocument10 pagesCauchy Stress Tensor WikiVicky JaiswalNo ratings yet
- State of Stress at PointDocument37 pagesState of Stress at PointDilara ÇınarelNo ratings yet
- 2 - Theories of Stress and StrainDocument28 pages2 - Theories of Stress and StrainJorge Roa RomeroNo ratings yet
- Mechanics of Materials BasicsDocument65 pagesMechanics of Materials BasicsengrasheedNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Structural Integrity ManagementDocument22 pagesStructural Integrity Managementonnly1964100% (1)
- Structural Integrity Management: Ageing Structures Workshop April 8thDocument10 pagesStructural Integrity Management: Ageing Structures Workshop April 8thonnly1964No ratings yet
- Structural Integrity ManagementDocument12 pagesStructural Integrity Managementonnly1964No ratings yet
- NRES Report IllustrationDocument2 pagesNRES Report Illustrationonnly1964No ratings yet
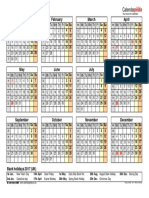
- Calendar 2017 Landscape Year at A GlanceDocument1 pageCalendar 2017 Landscape Year at A Glanceonnly1964No ratings yet
- Bulge/ FLC Tester Model 161: Testing Equipment For Quality ManagementDocument4 pagesBulge/ FLC Tester Model 161: Testing Equipment For Quality Managementonnly1964No ratings yet
- Distributed Intelligent Systems: Cursus Sem. TypeDocument2 pagesDistributed Intelligent Systems: Cursus Sem. Typeonnly1964No ratings yet
- Universal Sheet Metal Testing Machine Model 146: Maximum Strain Deep Drawing Cup TestDocument4 pagesUniversal Sheet Metal Testing Machine Model 146: Maximum Strain Deep Drawing Cup Testonnly1964No ratings yet
- SolidWorksToAbaqus AIDocument28 pagesSolidWorksToAbaqus AIonnly1964No ratings yet
- Renewable Energy: Wenyi Liu, Baoping Tang, Yonghua JiangDocument5 pagesRenewable Energy: Wenyi Liu, Baoping Tang, Yonghua Jiangonnly1964No ratings yet
- PHD PlannerDocument3 pagesPHD Planneronnly1964No ratings yet
- Model Testing of FPSODocument80 pagesModel Testing of FPSOJorge HLNo ratings yet
- ch08 SMDocument139 pagesch08 SMPiNg Wanwatanakul0% (1)
- 2d Unsteady Flow HydrodynamicsDocument16 pages2d Unsteady Flow Hydrodynamicsshubham sachanNo ratings yet
- CFDDocument16 pagesCFDRangel Silva100% (1)
- Lecture 3 VTSDocument42 pagesLecture 3 VTSGanesuni HarishNo ratings yet
- Date: March 20, 2015 Wicomico High School 5E Lesson Plan Subject: Honors Chemistry Grade: 11th/12th Teacher: Rachel ThorntonDocument3 pagesDate: March 20, 2015 Wicomico High School 5E Lesson Plan Subject: Honors Chemistry Grade: 11th/12th Teacher: Rachel Thorntonapi-28361150088% (8)
- Physics - 1 - LESSON 1 (Final Term - Summer 23)Document18 pagesPhysics - 1 - LESSON 1 (Final Term - Summer 23)fardinmojumdar123No ratings yet
- Chapter # 11 Heat & Thermodynamic Golden PointsDocument8 pagesChapter # 11 Heat & Thermodynamic Golden PointsMudasir Hussain TuriNo ratings yet
- General Chemistry 2Document3 pagesGeneral Chemistry 2Rhea Gamao RarogalNo ratings yet
- PDC - TR 06 02 PDFDocument227 pagesPDC - TR 06 02 PDFHelenNo ratings yet
- Computational Fluid Dynamics Simulation of A Scroll CompressorDocument54 pagesComputational Fluid Dynamics Simulation of A Scroll Compressor吳致緯100% (1)
- Interview With Whitley Strieber by Sean CasteelDocument9 pagesInterview With Whitley Strieber by Sean CasteelastrozzNo ratings yet
- Fundamentals of Thermodynamics Solutions ch12Document156 pagesFundamentals of Thermodynamics Solutions ch12Cierré No'Middlename Jones100% (8)
- Stress and Strain Regime in Colombia, 2019 PDFDocument21 pagesStress and Strain Regime in Colombia, 2019 PDFEdgar Gilberto Arciniegas MillanNo ratings yet
- Solved Paper: Iit-Jam 2014: Part-I: Objective Questions Q. 1 - Q. 10 Carry One Mark EachDocument23 pagesSolved Paper: Iit-Jam 2014: Part-I: Objective Questions Q. 1 - Q. 10 Carry One Mark EachyashbhardwajNo ratings yet
- Modeling of Radiation Intensity in An EAFDocument6 pagesModeling of Radiation Intensity in An EAFmehran1364No ratings yet
- 2D Flow Past Cylinder - 21 Mar 21Document12 pages2D Flow Past Cylinder - 21 Mar 21D NautiyalNo ratings yet
- SMiRT 25 Full Paper Konkuk Univ SubmittedDocument10 pagesSMiRT 25 Full Paper Konkuk Univ SubmittedRyu ReyhanNo ratings yet
- GATE 2014 Answer Keys For CS Computer Science and Information TechnologyDocument1 pageGATE 2014 Answer Keys For CS Computer Science and Information TechnologyKaustav BasuNo ratings yet
- The Optics of Distributed Vibration SensingDocument5 pagesThe Optics of Distributed Vibration SensingJanNo ratings yet
- Technical Report: Assessment of Torque-Controlled Bonded AnchorsDocument6 pagesTechnical Report: Assessment of Torque-Controlled Bonded AnchorscoolkaisyNo ratings yet
- Is Alice Burning or Fuzzing?Document14 pagesIs Alice Burning or Fuzzing?Fábio DuarteNo ratings yet
- Chapter 9 Static Equilibrium Elasticity and Fracture: Physics: Principle and Applications, 7e (Giancoli)Document24 pagesChapter 9 Static Equilibrium Elasticity and Fracture: Physics: Principle and Applications, 7e (Giancoli)KarissaNo ratings yet
- Determining Density Lab ReportDocument3 pagesDetermining Density Lab ReportJohn JohnsonNo ratings yet
- Exp - S1B - Vapor in Air DiffusionDocument11 pagesExp - S1B - Vapor in Air DiffusionAnuj SrivastavaNo ratings yet
- ME466 Computational Fluid DynamicsDocument2 pagesME466 Computational Fluid DynamicsAkhi SankarNo ratings yet