Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Panasonic LCD HDTV TC-L32X1 TC-L37X1 Chassis LH90 Service ManualDocument63 pagesPanasonic LCD HDTV TC-L32X1 TC-L37X1 Chassis LH90 Service ManualElectronica Leon Espinoza100% (4)
- Harris Surveillance AmberJack, StingRay, StingRay II, KingFish Wireless Surveillance Products Price ListDocument8 pagesHarris Surveillance AmberJack, StingRay, StingRay II, KingFish Wireless Surveillance Products Price Listoccupyoakland100% (1)
- 7 WeightSystem - ENG IsDocument174 pages7 WeightSystem - ENG Iseverton vittiNo ratings yet
- Fat - MSB Pmu JinjangDocument6 pagesFat - MSB Pmu JinjangFirdaus Muhammad100% (1)
- FX3S - Hardware Manual (2AD Type) JY997D51701-A (09.13)Document4 pagesFX3S - Hardware Manual (2AD Type) JY997D51701-A (09.13)Hanafi HariyantoNo ratings yet
- Fault Analysis in Power SystemsDocument3 pagesFault Analysis in Power SystemsdjebienNo ratings yet
- Power Transmission - WikipediaDocument3 pagesPower Transmission - WikipediaVIKAS T NNo ratings yet
- 數位控制系統 NTU 課程大綱Document3 pages數位控制系統 NTU 課程大綱Cuter HsuNo ratings yet
- BJT2Document12 pagesBJT2swan1619No ratings yet
- T40 Main Components Warranty Periods List-2Document2 pagesT40 Main Components Warranty Periods List-2pedro manjarres figueredoNo ratings yet
- Generic Torque-Maximizing Design Methodology of Surface Permanent - Magnet Vernier MachineDocument8 pagesGeneric Torque-Maximizing Design Methodology of Surface Permanent - Magnet Vernier MachineJohn McLovenNo ratings yet
- Sony KDL 40HX800 ManualDocument24 pagesSony KDL 40HX800 ManualRipu Simiyu100% (1)
- R&S®Series4200 Software Defined Radios: VHF/UHF Radio Family For ATC CommunicationsDocument24 pagesR&S®Series4200 Software Defined Radios: VHF/UHF Radio Family For ATC CommunicationsDoan HoaNo ratings yet
- Ieee 1584 Arc Flash Hazard - Ilm (Energia Incidente)Document21 pagesIeee 1584 Arc Flash Hazard - Ilm (Energia Incidente)thaleshatemNo ratings yet
- High Voltage Cable Accessories: Product CatalogDocument53 pagesHigh Voltage Cable Accessories: Product Catalogla ammiragfliaNo ratings yet
- Liebert APM: User Manual-15-90kVA, 120, 208, 480 and 600V, 50/60HzDocument144 pagesLiebert APM: User Manual-15-90kVA, 120, 208, 480 and 600V, 50/60Hzhector CarreraNo ratings yet
- Juuko ENGDocument4 pagesJuuko ENGBegoñaNo ratings yet
- Hy-Gain 411 Five Element BeamDocument7 pagesHy-Gain 411 Five Element BeamRobert GettyNo ratings yet
- 2nd-Order System: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocument12 pages2nd-Order System: Lab-808: Power Electronic Systems & Chips Lab., NCTU, Taiwanhord72No ratings yet
- 5069 In011f en P PDFDocument12 pages5069 In011f en P PDFfaisalNo ratings yet
- 3000A-Calibration-Manual AJUSTE-V3 PDFDocument84 pages3000A-Calibration-Manual AJUSTE-V3 PDFfelipeNo ratings yet
- Multi VibratorsDocument24 pagesMulti VibratorsAnanthnag BezgamNo ratings yet
- Power Electronics Chapter#09Document18 pagesPower Electronics Chapter#09Bilal HussainNo ratings yet
- Motor Driver ICs For Industrial Consumer and Computer ApplicationsDocument8 pagesMotor Driver ICs For Industrial Consumer and Computer ApplicationsMax AGuilarNo ratings yet
- As 2374.8-2000 Power Transformers Application GuideDocument7 pagesAs 2374.8-2000 Power Transformers Application GuideSAI Global - APACNo ratings yet
- Eh Pitchfork en PDFDocument2 pagesEh Pitchfork en PDFMairondoNo ratings yet
- Conductors and Insulators LPDocument2 pagesConductors and Insulators LPrezhabloNo ratings yet
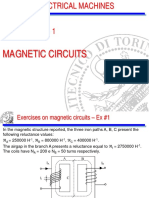
- Exercises On ELECTRICAL MACHINESDocument29 pagesExercises On ELECTRICAL MACHINESDavide100% (1)
- 03 FCC Test Report DSS Module A 5143835Document64 pages03 FCC Test Report DSS Module A 5143835KIN SNo ratings yet
- Adept MV ControllerDocument402 pagesAdept MV Controllerenzo67No ratings yet