Download as pdf or txt
You might also like
- Practical Research 1 Paper FormatDocument6 pagesPractical Research 1 Paper FormatKhea Gamil100% (6)
- HLSC4482U Course SyllabusDocument9 pagesHLSC4482U Course Syllabusahmad.a.touseefNo ratings yet
- Determine and Sketch: The Even and Odd Parts of The Signals Depicted in Figures. Label Your Sketches CarefullyDocument5 pagesDetermine and Sketch: The Even and Odd Parts of The Signals Depicted in Figures. Label Your Sketches Carefullyyaswanth rNo ratings yet
- Module 1 Types of Qualitative ResearchDocument5 pagesModule 1 Types of Qualitative ResearchMc Jansen Cadag0% (1)
- Application of Limits and ContinuityDocument2 pagesApplication of Limits and ContinuityBabar JavedNo ratings yet
- Control System IDocument13 pagesControl System Ishiko nemanNo ratings yet
- Assignment of Signals and SystemDocument3 pagesAssignment of Signals and SystemNitish Kumar YadavNo ratings yet
- CH 1Document11 pagesCH 1tarekegn utaNo ratings yet
- Signals Analysis - Assignment # 2: Fourier Transform: Universidad de La SalleDocument6 pagesSignals Analysis - Assignment # 2: Fourier Transform: Universidad de La SalleWilliam Steven Triana GarciaNo ratings yet
- Signals and Systems: Lecture #2: Introduction To SystemsDocument8 pagesSignals and Systems: Lecture #2: Introduction To Systemsking_hhhNo ratings yet
- Enee 660 HW #7Document2 pagesEnee 660 HW #7PeacefulLion0% (1)
- Ece IV Signals & Systems (10ec44) AssignmentDocument14 pagesEce IV Signals & Systems (10ec44) AssignmentBlackArmy880% (1)
- Signals & Systems (Solved Problems)Document7 pagesSignals & Systems (Solved Problems)Lohith CoreelNo ratings yet
- 202 End Term Solutions 2013Document17 pages202 End Term Solutions 2013Vikash ManidharNo ratings yet
- Control System IDocument12 pagesControl System IKhawar RiazNo ratings yet
- Cce330 (B) L: Matlab Applications in Signals and (Bio) Systems: American University of Science & TechnologyDocument7 pagesCce330 (B) L: Matlab Applications in Signals and (Bio) Systems: American University of Science & TechnologyDani Hajj Ali SleimanNo ratings yet
- S and S Examination PaperDocument3 pagesS and S Examination Paperzeeshanahmad12030No ratings yet
- Signals and SystemsDocument9 pagesSignals and SystemsJeevith JeeviNo ratings yet
- ELCE301 Lecture5 (LTIsystems Time2)Document31 pagesELCE301 Lecture5 (LTIsystems Time2)Little VoiceNo ratings yet
- Tutorial 1Document12 pagesTutorial 1Beat Boy RkayNo ratings yet
- Signals and Systems: ELCE 301 Continuous-Time SystemsDocument26 pagesSignals and Systems: ELCE 301 Continuous-Time SystemsLittle VoiceNo ratings yet
- Project Fall2015Document5 pagesProject Fall2015AlvinNo ratings yet
- Haramaya Inistitute of Technology School of Electrical and Computer Engineering Signal and Systems Analysis WorksheetDocument5 pagesHaramaya Inistitute of Technology School of Electrical and Computer Engineering Signal and Systems Analysis Worksheetktesfaneh01No ratings yet
- Advance Control Systems Lab File: Name: Prateek Pandey Enroll. No: 43113204918 Batch: EEE 4 YrDocument26 pagesAdvance Control Systems Lab File: Name: Prateek Pandey Enroll. No: 43113204918 Batch: EEE 4 YrCharanpreet SinghNo ratings yet
- Signals and SystemsDocument2 pagesSignals and SystemsJanani MunisamyNo ratings yet
- EE322M Assignment 01Document4 pagesEE322M Assignment 01shubhamNo ratings yet
- EE132 Lab1 OL Vs CLDocument3 pagesEE132 Lab1 OL Vs CLthinkberry22No ratings yet
- HW 4Document2 pagesHW 4Kuann CNo ratings yet
- Sheet 2Document1 pageSheet 2Keke 911No ratings yet
- Yt X HT D: Lecture 9: Convolution Evaluation: Continuous Time SystemDocument5 pagesYt X HT D: Lecture 9: Convolution Evaluation: Continuous Time SystemRajat RameshNo ratings yet
- Discret IzationDocument18 pagesDiscret IzationsydofneeNo ratings yet
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceDocument5 pagesENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaNo ratings yet
- Lab 06 PDFDocument7 pagesLab 06 PDFAbdul Rehman AfzalNo ratings yet
- Lecture 2Document47 pagesLecture 2Houssam moussaNo ratings yet
- Systems: Mathematical Model of A Physical ProcessDocument15 pagesSystems: Mathematical Model of A Physical ProcesszawirNo ratings yet
- Module-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughDocument27 pagesModule-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughMehul MayankNo ratings yet
- Mathematics 08 00992Document20 pagesMathematics 08 00992JaimeSobrinhoNo ratings yet
- Ece 565 - HW1 - 12Document2 pagesEce 565 - HW1 - 12Dave JonesNo ratings yet
- CH 2 System and PropertiesDocument99 pagesCH 2 System and PropertiesPUSPA JOSHINo ratings yet
- Old Exams - 3rd MT (2017-3) - AMRDocument2 pagesOld Exams - 3rd MT (2017-3) - AMRAndrea SabogalNo ratings yet
- First Problem Assignment: EE603 - DSP and Its ApplicationsDocument3 pagesFirst Problem Assignment: EE603 - DSP and Its ApplicationsRahul CPNo ratings yet
- Chapter - 5 - Part2 - DT Signals & SystemsDocument51 pagesChapter - 5 - Part2 - DT Signals & SystemsReddy BabuNo ratings yet
- EE301 FINAL Fall22 Allquestions Ver5Document7 pagesEE301 FINAL Fall22 Allquestions Ver5hasan MD. ShazidNo ratings yet
- rr321303 Advanced Control SystemsDocument8 pagesrr321303 Advanced Control SystemsSRINIVASA RAO GANTANo ratings yet
- Kheder MED 10Document6 pagesKheder MED 10p26q8p8xvrNo ratings yet
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaDocument120 pagesProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçNo ratings yet
- Control Systems CSE 301 Lab Manual 5: G(s) = s s + ωDocument3 pagesControl Systems CSE 301 Lab Manual 5: G(s) = s s + ωsumairanadeem83100% (1)
- Alkafeel University Engineering College Department of Computer Techniques EngineeringDocument9 pagesAlkafeel University Engineering College Department of Computer Techniques Engineeringمحمد مهدي الحسينيNo ratings yet
- Examination Control Systems 2: Problem 1Document4 pagesExamination Control Systems 2: Problem 1Luis CarvalhoNo ratings yet
- DSPDocument95 pagesDSPAbdulhafeez ShaikNo ratings yet
- SSP QB Answers Unit-1 PDFDocument59 pagesSSP QB Answers Unit-1 PDFmushahedNo ratings yet
- BIEN462 A1Document4 pagesBIEN462 A1Eileen FuNo ratings yet
- Signal & System - UNIT - I - MCQDocument18 pagesSignal & System - UNIT - I - MCQMr. AbrarNo ratings yet
- This Set of SignalsDocument52 pagesThis Set of SignalsumaNo ratings yet
- EEE243/ECE243 Signals and Systems - Assignment : Please Show All The Integrations. Do Not Use Any CalculatorsDocument5 pagesEEE243/ECE243 Signals and Systems - Assignment : Please Show All The Integrations. Do Not Use Any CalculatorsRedwan AhmedNo ratings yet
- State Estimation For Nonlinear System Diagnosis UsDocument9 pagesState Estimation For Nonlinear System Diagnosis UsFatiha HAMDINo ratings yet
- Signals and Systems Question BankDocument4 pagesSignals and Systems Question BankVimal RajNo ratings yet
- Assignment 2Document7 pagesAssignment 2ue06037No ratings yet
- HW SignalDocument4 pagesHW SignalHiếu VũNo ratings yet
- Maquin STA 09Document28 pagesMaquin STA 09p26q8p8xvrNo ratings yet
- Lab 4: Linear Time-Invariant Systems and Representation: ObjectivesDocument6 pagesLab 4: Linear Time-Invariant Systems and Representation: ObjectivesFahad AneebNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Maxwell's Equations Summary SheetDocument4 pagesMaxwell's Equations Summary Sheetahmad.a.touseefNo ratings yet
- Course Outline ENGR4500U - PostedDocument7 pagesCourse Outline ENGR4500U - Postedahmad.a.touseefNo ratings yet
- 2017 - ELEE3100 - Lectures 13 - BLANK - PPT - Bode PlotsDocument15 pages2017 - ELEE3100 - Lectures 13 - BLANK - PPT - Bode Plotsahmad.a.touseefNo ratings yet
- 13C NMR Student Product W11Document2 pages13C NMR Student Product W11ahmad.a.touseefNo ratings yet
- CHEM 2120 Midterm 1 PracticeDocument8 pagesCHEM 2120 Midterm 1 Practiceahmad.a.touseefNo ratings yet
- Code of Ethics Sections 72 & 77 From Ontario Regulation 941Document2 pagesCode of Ethics Sections 72 & 77 From Ontario Regulation 941ahmad.a.touseefNo ratings yet
- ENGR 1200 Introduction To Programming Lecture 0Document12 pagesENGR 1200 Introduction To Programming Lecture 0ahmad.a.touseefNo ratings yet
- Cardiovascular Assessment LabDocument6 pagesCardiovascular Assessment Labahmad.a.touseefNo ratings yet
- Lab 3 ManualDocument23 pagesLab 3 Manualahmad.a.touseefNo ratings yet
- Electric Machines LabDocument68 pagesElectric Machines Labahmad.a.touseefNo ratings yet
- ENGL 1003T Syllabus Revolution Summer 2017Document6 pagesENGL 1003T Syllabus Revolution Summer 2017ahmad.a.touseefNo ratings yet
- ELEE3240U Course Outlines 2015Document6 pagesELEE3240U Course Outlines 2015ahmad.a.touseefNo ratings yet
- How To Become An Exec (Executive) at A Club or Society at UOIT or DC?Document1 pageHow To Become An Exec (Executive) at A Club or Society at UOIT or DC?ahmad.a.touseefNo ratings yet
- Bachelor of Health Science - Medical Laboratory Science 2013-2014Document1 pageBachelor of Health Science - Medical Laboratory Science 2013-2014ahmad.a.touseefNo ratings yet
- DesigualdadesDocument97 pagesDesigualdadesabner_chingaNo ratings yet
- Mahadi Shahrill 2014Document9 pagesMahadi Shahrill 2014bandivas.vlonericaNo ratings yet
- Pharm. Analysis - Calculations in Volumetric Analysis (Midterms) PDFDocument1 pagePharm. Analysis - Calculations in Volumetric Analysis (Midterms) PDFSHAIRA PAMAYLAONNo ratings yet
- Tugas Kimia Analitik 2Document6 pagesTugas Kimia Analitik 2DiahNurhayatiNo ratings yet
- Calcu TechsDocument73 pagesCalcu TechsAmstel McGinnisNo ratings yet
- A221 SOW Calculus I SQQM1034 UpdateDocument6 pagesA221 SOW Calculus I SQQM1034 UpdateAnis SyazwaniNo ratings yet
- Industrial Project Management A Handbook of Planning Scheduling Evaluation TechniquesDocument103 pagesIndustrial Project Management A Handbook of Planning Scheduling Evaluation TechniquesOmkarNo ratings yet
- Exercises: Level - 1 (Problems Based On Fundamentals)Document19 pagesExercises: Level - 1 (Problems Based On Fundamentals)Shashank KumarNo ratings yet
- 2nd Grading IP FormatDocument4 pages2nd Grading IP FormatAnna Garcia BuquidNo ratings yet
- Operation Research: AssignmentsDocument8 pagesOperation Research: AssignmentsSekla ShaqdieselNo ratings yet
- Marketing Research ProcessDocument3 pagesMarketing Research ProcessTripti TewariNo ratings yet
- Lecture1 8 PDFDocument2 pagesLecture1 8 PDFbiruk1No ratings yet
- Survival Analysis OverviewDocument23 pagesSurvival Analysis OverviewLoraline YuNo ratings yet
- Practical Research 2 Quarter 2 Week 7Document4 pagesPractical Research 2 Quarter 2 Week 7Caranay BillyNo ratings yet
- Article Gerdi Kafi LoleDocument10 pagesArticle Gerdi Kafi Lolealimudasiregar98No ratings yet
- Function: Q-Series: Mathematics For BS/MS.C QM Khan Wazir 14Document10 pagesFunction: Q-Series: Mathematics For BS/MS.C QM Khan Wazir 14Kamran JalilNo ratings yet
- Applied Nonparametric RegressionDocument426 pagesApplied Nonparametric RegressionIntan Purnomosari100% (1)
- Jinnah Educational Institute: Name: - Roll NoDocument3 pagesJinnah Educational Institute: Name: - Roll Nocarrot112233No ratings yet
- Control Engineering PDFDocument164 pagesControl Engineering PDFsanthoshramrNo ratings yet
- Lecture Notes ON Differential and Integral Calculus: Pablo S. CasasDocument29 pagesLecture Notes ON Differential and Integral Calculus: Pablo S. CasasJonathan MendietaNo ratings yet
- Matlab: Symbolic Math Toolbox, Control System Toolbox: Dr. Luis SánchezDocument35 pagesMatlab: Symbolic Math Toolbox, Control System Toolbox: Dr. Luis SánchezmiscaelNo ratings yet
- 1280-IIT JEE2012 Maths DPP 2 Differentiation WAKeyDocument2 pages1280-IIT JEE2012 Maths DPP 2 Differentiation WAKeykashish_chaddha100% (1)
- Kerangka Konsep KajianDocument3 pagesKerangka Konsep KajianZuraifah Safiee100% (1)
- Ejercicios Métodos ElectroquímicosDocument3 pagesEjercicios Métodos ElectroquímicosGalo OrtizNo ratings yet
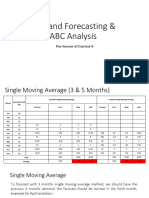
- Answer Demand Forecasting & ABC Analysis (Exercise 2)Document18 pagesAnswer Demand Forecasting & ABC Analysis (Exercise 2)Asep Rahmatullah50% (2)
- Efficient Topology Optimization in MATLAB Using 88 Lines of CodeDocument16 pagesEfficient Topology Optimization in MATLAB Using 88 Lines of CodepietroNo ratings yet
- Mid Term - Sample QPMMZG515 - SAT09 - ANDocument3 pagesMid Term - Sample QPMMZG515 - SAT09 - ANSrinivas RNo ratings yet