Download as pdf or txt
You might also like
- A/C Mazda 3 Sistema ManualDocument2 pagesA/C Mazda 3 Sistema ManualJhon ConnorNo ratings yet
- HHT Alpha MethodDocument22 pagesHHT Alpha MethodSasi Sudhahar ChinnasamyNo ratings yet
- Energy-Based Hybrid Control For The RTAC System: Experimental ResultsDocument6 pagesEnergy-Based Hybrid Control For The RTAC System: Experimental ResultsDhandapani ManoharanNo ratings yet
- Power-Shaping Control of An Exothermic Continuous Stirred Tank Reactor (CSTR)Document10 pagesPower-Shaping Control of An Exothermic Continuous Stirred Tank Reactor (CSTR)chithuan0805No ratings yet
- On An Optimal Linear Control of A Chaotic Non-Ideal Duffing SystemDocument7 pagesOn An Optimal Linear Control of A Chaotic Non-Ideal Duffing SystemJefferson MartinezNo ratings yet
- Nonlinear PI/PID Controllers For A High-Order Reactor SystemDocument6 pagesNonlinear PI/PID Controllers For A High-Order Reactor SystemEngr Nayyer Nayyab MalikNo ratings yet
- Integration of The Synthetic Dynamics Power Flow Equations With The Optimal MultiplierDocument5 pagesIntegration of The Synthetic Dynamics Power Flow Equations With The Optimal MultiplierMarchena Segil ErikNo ratings yet
- Robust Nonlinear Controller Design of Wind Turbine With Doubly Fed Induction Generator by Using Hamiltonian Energy ApproachDocument6 pagesRobust Nonlinear Controller Design of Wind Turbine With Doubly Fed Induction Generator by Using Hamiltonian Energy ApproachB Vijay VihariNo ratings yet
- Lagrange Equation 1Document32 pagesLagrange Equation 1Gthulasi78No ratings yet
- Cartesian Impedance Control of Redundant Robots: Recent Results With The DLR-Light-Weight-ArmsDocument6 pagesCartesian Impedance Control of Redundant Robots: Recent Results With The DLR-Light-Weight-ArmsByron Xavier Lima CedilloNo ratings yet
- Systems & Control Letters: Joaquín Carrasco, Alfonso Baños, Arjan Van Der SchaftDocument7 pagesSystems & Control Letters: Joaquín Carrasco, Alfonso Baños, Arjan Van Der SchaftPaulina MarquezNo ratings yet
- Robust Pointwise Min-Norm Control of Distributed Systems With Fluid FlowDocument6 pagesRobust Pointwise Min-Norm Control of Distributed Systems With Fluid FlowdgsdfjkgdfjksnNo ratings yet
- Electromagnetic Levitation System: An Experimental ApproachDocument7 pagesElectromagnetic Levitation System: An Experimental Approachsh1n00b1No ratings yet
- Mathetical ModelDocument3 pagesMathetical ModelOscar AvilesNo ratings yet
- Paper 31Document6 pagesPaper 31Daniel G Canton PuertoNo ratings yet
- Controller Design of Inverted Pendulum Using Pole Placement and LQRDocument7 pagesController Design of Inverted Pendulum Using Pole Placement and LQRInternational Journal of Research in Engineering and Technology100% (1)
- PaperhbifDocument28 pagesPaperhbifIshika KhandelwalNo ratings yet
- Passivity Based Modelling and Simulation of A Nonlinear Process Control SystemDocument6 pagesPassivity Based Modelling and Simulation of A Nonlinear Process Control SystemJose A MuñozNo ratings yet
- Interconnection and Damping Assignment Passivity-Based Experimental Control of A Single-Link Exible Robot ArmDocument6 pagesInterconnection and Damping Assignment Passivity-Based Experimental Control of A Single-Link Exible Robot ArminfodotzNo ratings yet
- Stress-Energy Tensor Beyond The Belinfante and Rosenfeld FormulaDocument7 pagesStress-Energy Tensor Beyond The Belinfante and Rosenfeld FormulajuanrgaNo ratings yet
- State RegulatorDocument23 pagesState RegulatorRishi Kant SharmaNo ratings yet
- Neural Network Based Model Reference Adaptive Control For Ship Steering SystemDocument8 pagesNeural Network Based Model Reference Adaptive Control For Ship Steering SystemdharshanirymondNo ratings yet
- An Adaptive Controller Using Output Feedback For Improving Dynamic Stability of Synchronous Power SystemDocument7 pagesAn Adaptive Controller Using Output Feedback For Improving Dynamic Stability of Synchronous Power Systemনূর হোসেন সৌরভNo ratings yet
- 1984, A Molecular Dynamics Method For Simulations in The Canonical Ensemblet by SHUICHI NOSEDocument14 pages1984, A Molecular Dynamics Method For Simulations in The Canonical Ensemblet by SHUICHI NOSEAnatoli KrasilnikovNo ratings yet
- Nonholonomic Control Systems On Riemannian Manifolds : L. IntroductionDocument21 pagesNonholonomic Control Systems On Riemannian Manifolds : L. IntroductionLuis Rios SantillanaNo ratings yet
- Dinius Project PaperDocument8 pagesDinius Project PaperIman SatriaNo ratings yet
- Modern Control Theory and It'S ApplicationsDocument9 pagesModern Control Theory and It'S ApplicationsMohamed ShamseldeinNo ratings yet
- CH 7Document10 pagesCH 7aprilswapnilNo ratings yet
- Configuration Equilibrium Perturbation InfinitesimalDocument10 pagesConfiguration Equilibrium Perturbation InfinitesimalAndrea ŠkarićNo ratings yet
- F95 OpenMPv1 v2Document21 pagesF95 OpenMPv1 v2Abdullah IlyasNo ratings yet
- Output Linear Feedback For A Class of Nonlinear Systems Based On The Invariant Ellipsoid MethodDocument6 pagesOutput Linear Feedback For A Class of Nonlinear Systems Based On The Invariant Ellipsoid MethodinfodotzNo ratings yet
- 7 Chapter 7: Non-Linear Thermodynamics of Irreversible ProcessesDocument13 pages7 Chapter 7: Non-Linear Thermodynamics of Irreversible ProcessesBARBOSA RAFFAELLINo ratings yet
- Estabilizacion de Reactores CSTRDocument28 pagesEstabilizacion de Reactores CSTRlamtrauNo ratings yet
- ViBrasi InmanDocument67 pagesViBrasi InmanAnonymous RJtBkn100% (1)
- Cartesian Impedance Control of RedundantDocument6 pagesCartesian Impedance Control of Redundant이재봉No ratings yet
- Stability Analysis of Nonlinear Systems Using Frozen Stationary LinearizationDocument5 pagesStability Analysis of Nonlinear Systems Using Frozen Stationary Linearizationeradat67No ratings yet
- Driving A Mechanical Resonator in To Coherent States Via Random Measurements - Lluc GarciaDocument10 pagesDriving A Mechanical Resonator in To Coherent States Via Random Measurements - Lluc GarciaCambiador de MundoNo ratings yet
- On Integral Control in Backstepping: Analysis of Different TechniquesDocument6 pagesOn Integral Control in Backstepping: Analysis of Different TechniqueslimakmNo ratings yet
- Applications of Passive Control To Electromechanical SystemsDocument21 pagesApplications of Passive Control To Electromechanical SystemsCafer BalNo ratings yet
- Non Linear Optimal Swing Up of An Inverted Pendulum On A Cart Using Pontryagin's Principle With Fixed Final TimeDocument8 pagesNon Linear Optimal Swing Up of An Inverted Pendulum On A Cart Using Pontryagin's Principle With Fixed Final TimeMatteo RocchiNo ratings yet
- Complete Quadratic Lyapunov Functionals Using Bessel LegendreInequalityDocument6 pagesComplete Quadratic Lyapunov Functionals Using Bessel LegendreInequalityVictor Manuel López MazariegosNo ratings yet
- Nonlinear Rescaling of Control Laws With Application To Stabilization in The Presence of Magnitude SaturationDocument32 pagesNonlinear Rescaling of Control Laws With Application To Stabilization in The Presence of Magnitude SaturationMayank SethiNo ratings yet
- Synthesis of The Adaptive Excitation Control System of High Power Synchronous GeneratorsDocument14 pagesSynthesis of The Adaptive Excitation Control System of High Power Synchronous Generators3KaiserENo ratings yet
- GPU-based Reaction Ensemble Monte Carlo Method For Non-Ideal Plasma ThermodynamicsDocument28 pagesGPU-based Reaction Ensemble Monte Carlo Method For Non-Ideal Plasma ThermodynamicsAndreina Dell'olioNo ratings yet
- Dynamics and Control of Reactor - Feed Effluent Heat Exchanger NetworksDocument6 pagesDynamics and Control of Reactor - Feed Effluent Heat Exchanger NetworksKarthik AnandanNo ratings yet
- Multicell Convertor - ObservatoriDocument6 pagesMulticell Convertor - ObservatoriAndrei CocorNo ratings yet
- Cattaneo y FourierDocument29 pagesCattaneo y FourierrobertoNo ratings yet
- Generalization of Selective Harmonic Control/Elimination: Jwells@uiuc - Edu Plchapma@uiuc - Edu Krein@uiuc - EduDocument6 pagesGeneralization of Selective Harmonic Control/Elimination: Jwells@uiuc - Edu Plchapma@uiuc - Edu Krein@uiuc - Edufade2548No ratings yet
- PhysRevE 87 030101Document4 pagesPhysRevE 87 030101Rajneesh PerhateNo ratings yet
- Position Control of A PM Stepper Motor Using Neural NetworksDocument4 pagesPosition Control of A PM Stepper Motor Using Neural NetworksLucas MartinezNo ratings yet
- On The Stabilization and Stability Robustness Against Small Delays of Some Damped Wave EquationsDocument5 pagesOn The Stabilization and Stability Robustness Against Small Delays of Some Damped Wave EquationsInst Robert Díaz RiemannNo ratings yet
- Discret HamzaouiDocument19 pagesDiscret HamzaouiPRED ROOMNo ratings yet
- Application of Kinetic Approximations Tothea B C Reaction SystemDocument4 pagesApplication of Kinetic Approximations Tothea B C Reaction SystemCintia Andrade MoóNo ratings yet
- Helicopter Dynamics-10Document14 pagesHelicopter Dynamics-10KaradiasNo ratings yet
- Cubli CDC13Document6 pagesCubli CDC13Denis Martins DantasNo ratings yet
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDocument10 pagesMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Assignment 3 SolutionDocument5 pagesAssignment 3 SolutionClerry Samuel100% (1)
- Hotness and Coldness ActivityDocument2 pagesHotness and Coldness ActivityMelanie Tagudin Trinidad50% (2)
- Chemical Engineering ObjectiveDocument3 pagesChemical Engineering ObjectiverastamanrmNo ratings yet
- Generation of Electricity Using Peltier ModuleDocument8 pagesGeneration of Electricity Using Peltier ModuleSarah Joy ManimtimNo ratings yet
- Unit 5 - First Law Applied To Flow ProcessDocument35 pagesUnit 5 - First Law Applied To Flow ProcessIamzura AbdullahNo ratings yet
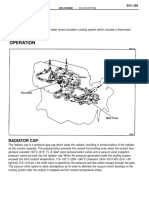
- Cooling System: Radiator CapDocument2 pagesCooling System: Radiator CaprizkyNo ratings yet
- Nocturnal RadiationcoolingDocument9 pagesNocturnal RadiationcoolingAbishaTeslinNo ratings yet
- SteamTurbineanalysisms KumanaIETC20173 27 17Document9 pagesSteamTurbineanalysisms KumanaIETC20173 27 17Vivek DomadiyaNo ratings yet
- Cooling Tower 6MWDocument6 pagesCooling Tower 6MWtedfdfeNo ratings yet
- Lab Report 4 Heat Exchanger DPDocument9 pagesLab Report 4 Heat Exchanger DPnightfirexlNo ratings yet
- Ashrae Technical Committees, Task Groups, and Technical Resource GroupsDocument1 pageAshrae Technical Committees, Task Groups, and Technical Resource GroupsLuciano EbangNo ratings yet
- Theories of Combustion: Module 1, Lesson 1Document10 pagesTheories of Combustion: Module 1, Lesson 1Maila edmarie AbreseNo ratings yet
- AUXACDocument60 pagesAUXACManual De UtilizareNo ratings yet
- 2nd Term Study Guide 4th Grade Feb 2024 Cambridge ObjectivesDocument8 pages2nd Term Study Guide 4th Grade Feb 2024 Cambridge Objectivessofi.cardenas1968No ratings yet
- IES CONV Mechanical Engineering 1991Document7 pagesIES CONV Mechanical Engineering 1991GURURAJ CNo ratings yet
- NCERT Exemplar Class 7 Science Solutions Chapter 4 HeatDocument10 pagesNCERT Exemplar Class 7 Science Solutions Chapter 4 HeatSiva PrasadNo ratings yet
- Performance of A Heat Pipe Solar CollectorDocument5 pagesPerformance of A Heat Pipe Solar Collectorgonzalez2678No ratings yet
- CHAPTER 9: Phase Diagrams The Solubility Limit: Issues To Address..Document12 pagesCHAPTER 9: Phase Diagrams The Solubility Limit: Issues To Address..Chidu KNo ratings yet
- Triple Point of Water - AssignmentDocument13 pagesTriple Point of Water - AssignmentpatilsspNo ratings yet
- 5.heat (New India Era) by PrashantDocument3 pages5.heat (New India Era) by PrashantJuned MulaniNo ratings yet
- Penguapan Pengembunan 3Document18 pagesPenguapan Pengembunan 3DahniarIkaNo ratings yet
- Lesson Exemplar On Physical Changes of Solid, Liquid and GasDocument3 pagesLesson Exemplar On Physical Changes of Solid, Liquid and GasJimielle Shane Simon100% (1)
- GATEFLIX Chemical ThermodynamicsDocument119 pagesGATEFLIX Chemical ThermodynamicsVijaykumar JatothNo ratings yet
- Hvac and Refrigiration System: Group 1Document52 pagesHvac and Refrigiration System: Group 1Jessa Mae CatabayNo ratings yet
- 2022 TECUMSEH Compressor General Catalogue 2022Document120 pages2022 TECUMSEH Compressor General Catalogue 2022jonnylimNo ratings yet
- Actual Flow To Normal FlowDocument2 pagesActual Flow To Normal Flowsomucdm6023100% (1)
- Unidad III Termo IDocument15 pagesUnidad III Termo IMusfirah AdeelNo ratings yet
- Calculation of Enthalpy Changes: Basic Principles and Calculations in Chemical EngineeringDocument7 pagesCalculation of Enthalpy Changes: Basic Principles and Calculations in Chemical EngineeringSafa AlniamiNo ratings yet
- ENGRD 2210 Syllabus 2011Document4 pagesENGRD 2210 Syllabus 2011aoeusnthidNo ratings yet