Download as pdf or txt
You might also like
- Embedded Systems Andd RoboticsDocument20 pagesEmbedded Systems Andd RoboticsKen GarciaNo ratings yet
- Robotics Is A Technology That Deals With Design of RobotsDocument11 pagesRobotics Is A Technology That Deals With Design of Robotspurushothaman.rNo ratings yet
- Big Data and HadoopDocument37 pagesBig Data and HadoopSreenivasulu GogulaNo ratings yet
- Artificial Intelligence in Gravel PackingDocument22 pagesArtificial Intelligence in Gravel PackingUgomuoh Tochukwu TheophineNo ratings yet
- Basics of PythonDocument48 pagesBasics of PythonMubaraka KundawalaNo ratings yet
- Project Work: Submitted To:R.VidthyaDocument11 pagesProject Work: Submitted To:R.Vidthyaharipriya25No ratings yet
- Lab 1 Welcome To PYTHONDocument30 pagesLab 1 Welcome To PYTHONRudra Madhab PaniNo ratings yet
- Intro To Python: Data Science DeveloperDocument35 pagesIntro To Python: Data Science DeveloperKarina Permata SariNo ratings yet
- Python Brief IntroDocument25 pagesPython Brief Introkeyur patelNo ratings yet
- Data Management LessonsDocument77 pagesData Management LessonsAndreaNo ratings yet
- Classification Using Deep Learning NetworksDocument27 pagesClassification Using Deep Learning NetworksWaheed NangigaddaNo ratings yet
- Robotics: Hira Shabbir 15006101049Document13 pagesRobotics: Hira Shabbir 15006101049HIRA SHABBIR100% (1)
- History of RoboticsDocument15 pagesHistory of Roboticsapi-265598320No ratings yet
- Artificial Intelligence (And Stupidity) in Computer GamesDocument118 pagesArtificial Intelligence (And Stupidity) in Computer GamesLars LidenNo ratings yet
- Robotics and Artificial IntelligenceDocument3 pagesRobotics and Artificial Intelligenceraumil123No ratings yet
- Artificial IntelligenceDocument13 pagesArtificial IntelligenceShailendra SinghNo ratings yet
- Prepared by Richa Btech (Cse) 6 Sem Dav University JalandharDocument30 pagesPrepared by Richa Btech (Cse) 6 Sem Dav University JalandharRichaNo ratings yet
- Lecture 6 Smaller Network: RNN: One X at A Time Re-Use The Same Edge WeightsDocument39 pagesLecture 6 Smaller Network: RNN: One X at A Time Re-Use The Same Edge WeightsChandra Shekhar KadiyamNo ratings yet
- RoboticsDocument15 pagesRoboticsνιηαyαк нєgdє » NαηdιкαlNo ratings yet
- Nanotechnology in RoboticsDocument13 pagesNanotechnology in RoboticsmiyokofongNo ratings yet
- Basics of RoboticsDocument7 pagesBasics of RoboticsmanideenaNo ratings yet
- Installation of Python and Other PackagesDocument13 pagesInstallation of Python and Other Packagesanand.prathibaNo ratings yet
- Unit 1 Big Data Analytics - An Introduction (Final)Document65 pagesUnit 1 Big Data Analytics - An Introduction (Final)Murtaza VasanwalaNo ratings yet
- Artificial IntelligenceDocument27 pagesArtificial IntelligenceMd HassanNo ratings yet
- A Seminar ON Artificial Intelligence in Mechatronics and ApplicationDocument11 pagesA Seminar ON Artificial Intelligence in Mechatronics and ApplicationJohn ElekwaNo ratings yet
- Artificial Intelligence Presentation - RiadSpahiuDocument39 pagesArtificial Intelligence Presentation - RiadSpahiuRiad SpahiuNo ratings yet
- Micro RoboticsDocument14 pagesMicro RoboticsAmina FirdoseNo ratings yet
- Big Data NewDocument35 pagesBig Data NewikhwanNo ratings yet
- Lectures On Artificial Intelligence 12.09.14Document97 pagesLectures On Artificial Intelligence 12.09.14Jeet PatelNo ratings yet
- Robotics IntroDocument32 pagesRobotics IntroMadhusudhan D100% (1)
- Introduction To Big DataDocument30 pagesIntroduction To Big DatasameerwadkarNo ratings yet
- Industrial RoboticsDocument45 pagesIndustrial Roboticshimanshu singhNo ratings yet
- Natural Language ProcessingDocument21 pagesNatural Language ProcessingRaushan kumarNo ratings yet
- Big Data & Business Intelligence: Presented by Binh Nguyen - Luong DinhDocument24 pagesBig Data & Business Intelligence: Presented by Binh Nguyen - Luong Dinhgsrao_9No ratings yet
- Big Data and Cloud ComputingDocument27 pagesBig Data and Cloud ComputingShreeRoopaUNo ratings yet
- Robotics Good OneDocument50 pagesRobotics Good Onesatyavan_hangeNo ratings yet
- Python Classes in PuneDocument11 pagesPython Classes in PuneSirishaNo ratings yet
- Robotics SeminarDocument17 pagesRobotics SeminarTejasvi PalNo ratings yet
- Artificial Intelligence and Expert SystemsDocument36 pagesArtificial Intelligence and Expert Systemsdivz16No ratings yet
- AI ApplicationsDocument165 pagesAI ApplicationsHosam HatimNo ratings yet
- PythonDocument18 pagesPythonGitesh KumarNo ratings yet
- RoboticsDocument15 pagesRoboticsnaganathan88gmailNo ratings yet
- New Trends in RoboticsDocument25 pagesNew Trends in Roboticsrettore84No ratings yet
- MVDAFT FinalDocument30 pagesMVDAFT FinalVaibhav BajpaiNo ratings yet
- What Is Artificial IntelligenceDocument10 pagesWhat Is Artificial IntelligenceAmritaSinghNo ratings yet
- RoboticsDocument5 pagesRoboticsrkNo ratings yet
- Introduction To Data Science 5-13Document19 pagesIntroduction To Data Science 5-13Syed ZubairNo ratings yet
- Deep Learning Using SVM in MatlabDocument13 pagesDeep Learning Using SVM in MatlabAsrarLoonNo ratings yet
- 3 ETH Lecture Mobile Robots Kinematics Add Ons 2017 RSDocument36 pages3 ETH Lecture Mobile Robots Kinematics Add Ons 2017 RSAntonio PantaleonNo ratings yet
- Introduction To Big Data and HadoopDocument10 pagesIntroduction To Big Data and Hadoopvignesh51885No ratings yet
- Text MinningDocument13 pagesText MinningHudeh UdehNo ratings yet
- FYPpptDocument40 pagesFYPpptCosmk1ng Zero-1No ratings yet
- Humanoid Robots - Past, Present and The Future: June 2016Document9 pagesHumanoid Robots - Past, Present and The Future: June 2016Jithin JamesNo ratings yet
- Robotics Chapter 5 - Robot VisionDocument7 pagesRobotics Chapter 5 - Robot Visiontutorfelix777No ratings yet
- Artificial IntelligenceDocument6 pagesArtificial IntelligenceHussain HaronNo ratings yet
- Sushil Harsh Ruby Saurabh Prachi Nidhi Ronak: Presented byDocument11 pagesSushil Harsh Ruby Saurabh Prachi Nidhi Ronak: Presented bykajal kasotiyaNo ratings yet
- Data Science Overview - Part1Document28 pagesData Science Overview - Part1Yogesh KumarNo ratings yet
- Humanoid Robotics: By: Misbah NazirDocument16 pagesHumanoid Robotics: By: Misbah NazirMISBAH NAZIRNo ratings yet
- Spatial Data ManagementDocument19 pagesSpatial Data ManagementHassan Asy'ariNo ratings yet
- 3adr020077c0204 Rev B PLC AutomationDocument252 pages3adr020077c0204 Rev B PLC AutomationMohamed AlaaNo ratings yet
- Info Communication Modules HWRev4 enDocument2 pagesInfo Communication Modules HWRev4 enMohamed AlaaNo ratings yet
- VFD 1 Diagram1 PDFDocument1 pageVFD 1 Diagram1 PDFMohamed AlaaNo ratings yet
- CementDocument26 pagesCementMohamed AlaaNo ratings yet
- " Share Learn . Improve and Give Something Back": Richard Stallman'sDocument17 pages" Share Learn . Improve and Give Something Back": Richard Stallman'sMohamed AlaaNo ratings yet
- SB Imperva SecureSphere CEF GuideDocument21 pagesSB Imperva SecureSphere CEF GuideElhadji Boly Junior JOHNSONNo ratings yet
- Android Seminar PresentationDocument24 pagesAndroid Seminar PresentationYedu90% (20)
- Gym Management ModulesDocument7 pagesGym Management ModulesReshi DoabNo ratings yet
- Lesson Plan: R.V. College of Engineering, BangaloreDocument14 pagesLesson Plan: R.V. College of Engineering, BangaloreVeena Divya KrishnappaNo ratings yet
- USB Made EasyDocument141 pagesUSB Made EasyAndres Bruno Saravia100% (1)
- CS1 - Introduction To CloudDocument62 pagesCS1 - Introduction To CloudashishNo ratings yet
- (Tut) Create Bootable Usb With Multi Os - Distri - Tool - SymbianizeDocument36 pages(Tut) Create Bootable Usb With Multi Os - Distri - Tool - SymbianizeRodnieGubatonNo ratings yet
- User Guide: 5000B Data Acquisition and Logging Unit Versions 3.4 and Later HA027566/11 September 2012Document160 pagesUser Guide: 5000B Data Acquisition and Logging Unit Versions 3.4 and Later HA027566/11 September 2012Ricardo Cesar SantanaNo ratings yet
- BioEntryPlus Brochure PDFDocument2 pagesBioEntryPlus Brochure PDFDiober Conoto. El TiempoNo ratings yet
- Installation Guide For Cisco ACSDocument8 pagesInstallation Guide For Cisco ACSsomeoneniceNo ratings yet
- Mounting and Unmounting The CD-ROM Drive OnDocument8 pagesMounting and Unmounting The CD-ROM Drive OnMira NayrouzNo ratings yet
- Decimal Number Binary Octal HexadecimalDocument3 pagesDecimal Number Binary Octal HexadecimalYeong Zi YingNo ratings yet
- Sudo Apt-Get Install Ufw - To Install The Uncomplicated FirewallDocument17 pagesSudo Apt-Get Install Ufw - To Install The Uncomplicated FirewallLankipalli Krishna Sai 19BEC1067No ratings yet
- CLOUD 2700 R: Contact Smart Card ReaderDocument4 pagesCLOUD 2700 R: Contact Smart Card Readerson.600No ratings yet
- Chapter 3.2 BDCDocument36 pagesChapter 3.2 BDCNishu Bade ShresthaNo ratings yet
- Huawei AP7060DN Access Point DatasheetDocument13 pagesHuawei AP7060DN Access Point DatasheetMurillo SilvaNo ratings yet
- VMC On Aws Getting StartedDocument100 pagesVMC On Aws Getting StartedVel_st100% (1)
- Implementing LDAP in The Solaris™ Operating EnvironmentDocument16 pagesImplementing LDAP in The Solaris™ Operating Environmenticljf1No ratings yet
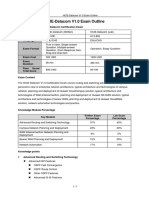
- HCIE-Datacom V1.0 Exam OutlineDocument7 pagesHCIE-Datacom V1.0 Exam Outlineabera alemayehuNo ratings yet
- NSX Administration Guide NSX For Vsphere 6.2Document370 pagesNSX Administration Guide NSX For Vsphere 6.2ledugarteNo ratings yet
- Nav 6Document6 pagesNav 6shailesh singhNo ratings yet
- Ajp NotesDocument18 pagesAjp NotesKrunal WaniNo ratings yet
- iTM 7.4 Release Note Version ADocument10 pagesiTM 7.4 Release Note Version AMutara Edmond NtareNo ratings yet
- Assignment 1 Prepared By: Sardar Real Abdullah Oppo PhoneDocument3 pagesAssignment 1 Prepared By: Sardar Real Abdullah Oppo PhoneBaroj RealNo ratings yet
- Service Gateway 9700: Empowering Rapid Deployment of Service InnovationDocument4 pagesService Gateway 9700: Empowering Rapid Deployment of Service InnovationPhạm Tuấn HoàngNo ratings yet
- M100700D - MME For Fanuc 6 - 11 - 12 ManualDocument38 pagesM100700D - MME For Fanuc 6 - 11 - 12 ManualTony AntonyNo ratings yet
- How To Resolve App-Related Issues Using ABI Setting On BlueStacks 5 - BlueStacks SupportDocument13 pagesHow To Resolve App-Related Issues Using ABI Setting On BlueStacks 5 - BlueStacks SupporthudaNo ratings yet
- Labsec 3335Document41 pagesLabsec 3335Dark HorizonNo ratings yet
- Java Performance Tuning Ver 1Document72 pagesJava Performance Tuning Ver 1Manoj BalaNo ratings yet
- Computer Notes THEORY Chapter #2 Class XI CompleteDocument9 pagesComputer Notes THEORY Chapter #2 Class XI CompleteNabil Ahmed Khan100% (2)