Download as pdf or txt
You might also like
- Access 2003 For IGCSE ICTDocument49 pagesAccess 2003 For IGCSE ICTIGCSE ICT84% (50)
- Eigenface TutorialDocument5 pagesEigenface TutorialAnonymous la43A1No ratings yet
- Smart Home Report FINAL PDFDocument16 pagesSmart Home Report FINAL PDFMarina Bochenkova100% (2)
- Common\Data\Action_table.csv Common\Data\Action_table.xls Common\Data\Action_table_backup.csv Common\Data\Ambient.dat Common\Data\Animgrp.dat Common\Data\Animviewer.dat Common\Data\Animviewer_images.txtDocument4 pagesCommon\Data\Action_table.csv Common\Data\Action_table.xls Common\Data\Action_table_backup.csv Common\Data\Ambient.dat Common\Data\Animgrp.dat Common\Data\Animviewer.dat Common\Data\Animviewer_images.txtdams6797No ratings yet
- Project Synopsis Mobile OMR System For Recognition of Filled BubblesDocument3 pagesProject Synopsis Mobile OMR System For Recognition of Filled BubblesKartik ChaudharyNo ratings yet
- Unlock Screen Application Design Using Face Expression On Android SmartphoneDocument9 pagesUnlock Screen Application Design Using Face Expression On Android SmartphoneData CoderNo ratings yet
- IML Chunk 1 - 1696412718585Document8 pagesIML Chunk 1 - 1696412718585ansh kumarNo ratings yet
- Msc. Research Proposal Master ProgramDocument8 pagesMsc. Research Proposal Master ProgramYassir SaaedNo ratings yet
- Recognition PDFDocument6 pagesRecognition PDFnaveen raiNo ratings yet
- Face Recognition Using Gabor Filters: Muhammad SHARIF, Adeel KHALID, Mudassar RAZA, Sajjad MOHSINDocument5 pagesFace Recognition Using Gabor Filters: Muhammad SHARIF, Adeel KHALID, Mudassar RAZA, Sajjad MOHSINYuri BrasilkaNo ratings yet
- AF and Face RecogDocument9 pagesAF and Face RecogKALAI SELVAM .MNo ratings yet
- Attendance System Based On Face Detection and Recognition: Submitted By: NannDocument18 pagesAttendance System Based On Face Detection and Recognition: Submitted By: NannBurhan RajputNo ratings yet
- Facial Expression RecognitionDocument9 pagesFacial Expression Recognitionambujhunk20No ratings yet
- Intelligent Parking Space Detection System Based OnDocument4 pagesIntelligent Parking Space Detection System Based OnDidiek Ainul Yaqin100% (1)
- Face DetectionDocument3 pagesFace Detectionnik_culNo ratings yet
- Problem Solving & MEADocument7 pagesProblem Solving & MEAateeq mughalNo ratings yet
- Paper On Image Stitching D10Document5 pagesPaper On Image Stitching D10nikil chinnaNo ratings yet
- Unit IiDocument54 pagesUnit IiUdaya sriNo ratings yet
- Report Sentiment Analysis Marcos MatheusDocument12 pagesReport Sentiment Analysis Marcos Matheusjfernandesj13No ratings yet
- Geometric Feature Learning: Unlocking Visual Insights through Geometric Feature LearningFrom EverandGeometric Feature Learning: Unlocking Visual Insights through Geometric Feature LearningNo ratings yet
- Automated Meter Reading Vision SystemDocument21 pagesAutomated Meter Reading Vision SystemHan Shen TeeNo ratings yet
- Design of A Face Recognition SystemDocument12 pagesDesign of A Face Recognition SystemWeights MattersNo ratings yet
- Analysis and Design of AlgorithmsDocument75 pagesAnalysis and Design of AlgorithmsSiva RajeshNo ratings yet
- Unit 1Document41 pagesUnit 1Meghana SNo ratings yet
- Edited IPDocument10 pagesEdited IPdamarajuvarunNo ratings yet
- Chapter 2. Literature SurveyDocument7 pagesChapter 2. Literature SurveyJai Manohar BandreNo ratings yet
- App Dynamics - Interview - Experience PDFDocument9 pagesApp Dynamics - Interview - Experience PDFSangam PatilNo ratings yet
- Journal of Computer Engineering & Technology (JCET) : ©iaemeDocument9 pagesJournal of Computer Engineering & Technology (JCET) : ©iaemeIAEME PublicationNo ratings yet
- Roshan AssDocument10 pagesRoshan AssBadavath JeethendraNo ratings yet
- Real-Time Face Detection From One Camera: 1. Research TeamDocument6 pagesReal-Time Face Detection From One Camera: 1. Research TeamMuhammad UlumNo ratings yet
- CSEGATEDocument133 pagesCSEGATEDhairya GopalNo ratings yet
- Face Detection and Face/Object TrackingDocument9 pagesFace Detection and Face/Object TrackingkavirishiNo ratings yet
- OMR Sheet Evaluation Toolbox Using MATLABDocument16 pagesOMR Sheet Evaluation Toolbox Using MATLABMehedi Hossen Limon100% (1)
- Title Automated Student Attendance Management System Using Face Recognition Domain: Image Processing, Deep Learning ObjectiveDocument8 pagesTitle Automated Student Attendance Management System Using Face Recognition Domain: Image Processing, Deep Learning ObjectiveRizaur RehamanNo ratings yet
- Generative Neural Network On Human AnimationDocument9 pagesGenerative Neural Network On Human AnimationTUẤN Đoàn MinhNo ratings yet
- Farooq CHAPTER ONE - ThreeDocument8 pagesFarooq CHAPTER ONE - ThreeOgunyemi VictorNo ratings yet
- Case Study For Pattern RecoginationDocument5 pagesCase Study For Pattern RecoginationAjay KrishNo ratings yet
- Student Attendance Monitoring System Via Face Detection and Recognition SystemDocument6 pagesStudent Attendance Monitoring System Via Face Detection and Recognition SystemIJSTENo ratings yet
- AP19110010110 Project ReportDocument9 pagesAP19110010110 Project ReportPhani BhushanNo ratings yet
- Image RecognitionDocument6 pagesImage RecognitionTanvi SharmaNo ratings yet
- Seminar Report: Facial Recognition Systems and AlgorithmsDocument31 pagesSeminar Report: Facial Recognition Systems and AlgorithmsNithin O JacobNo ratings yet
- General Problem Solver: Solving A Problem With GPSDocument6 pagesGeneral Problem Solver: Solving A Problem With GPSali HassanNo ratings yet
- CSC201 Lect1Document13 pagesCSC201 Lect1dixonsilverofficialNo ratings yet
- Mini Project MaheshDocument17 pagesMini Project MaheshSai PrashanthNo ratings yet
- How To Write Thesis Proposal On Face RecognitionDocument5 pagesHow To Write Thesis Proposal On Face RecognitionRahajul Amin RajuNo ratings yet
- Yawn Detector and Counter: TitleDocument7 pagesYawn Detector and Counter: TitleSandeep KumarNo ratings yet
- CSEGATEDocument138 pagesCSEGATESaritha CeelaNo ratings yet
- Computer & ITDocument148 pagesComputer & ITMohit GuptaNo ratings yet
- Automatic Corrections of Multiple-Choice Tests Using Video and Image ProcessingDocument6 pagesAutomatic Corrections of Multiple-Choice Tests Using Video and Image Processingamt12202No ratings yet
- Software Requirements Specification: Prepared byDocument13 pagesSoftware Requirements Specification: Prepared byashutosh kumarNo ratings yet
- Biometric System Notes - Unit 3Document17 pagesBiometric System Notes - Unit 30136akshaykumarNo ratings yet
- Machine Learning Unit 1Document72 pagesMachine Learning Unit 1Manshi JainNo ratings yet
- Face Recognition Techniques: ECE533 - Image Processing ProjectDocument15 pagesFace Recognition Techniques: ECE533 - Image Processing ProjectsrulakshNo ratings yet
- Syllabus of Machine LearningDocument19 pagesSyllabus of Machine Learninggauri krishnamoorthyNo ratings yet
- Face Detection Using Template MatchingDocument4 pagesFace Detection Using Template MatchingSantosh DineshNo ratings yet
- 02 Ai Project Cycle Revision NotesDocument4 pages02 Ai Project Cycle Revision NotesdevendrabanacNo ratings yet
- RefinedSynopsisFormat 2021-22Document10 pagesRefinedSynopsisFormat 2021-22Kiran Yadav SNo ratings yet
- Gate Study MaterialDocument89 pagesGate Study MaterialMansoor CompanywalaNo ratings yet
- Autonomous Vision Based Facial and Voice Recognition On The Unmanned Aerial VehicleDocument7 pagesAutonomous Vision Based Facial and Voice Recognition On The Unmanned Aerial VehicleEditor IJRITCCNo ratings yet
- B2Document44 pagesB2orsangobirukNo ratings yet
- Automatic Class Attendance System Based On Face Detection and RecognitionDocument28 pagesAutomatic Class Attendance System Based On Face Detection and RecognitionMinhajul IslamNo ratings yet
- Next Level Deep Machine Learning: Complete Tips and Tricks to Deep Machine LearningFrom EverandNext Level Deep Machine Learning: Complete Tips and Tricks to Deep Machine LearningNo ratings yet
- Shine Institute - Abap & - CaDocument5 pagesShine Institute - Abap & - CaPoorna28No ratings yet
- Tectiqs - 14 - Event Partnership With IntelDocument9 pagesTectiqs - 14 - Event Partnership With IntelBellallNo ratings yet
- Onyxworks Gateways: - NFN Fire MonitoringDocument2 pagesOnyxworks Gateways: - NFN Fire Monitoringمحمد رمضانNo ratings yet
- MITDP-Portfolio-List - UpdatedDocument7 pagesMITDP-Portfolio-List - Updatedsrikrishna natesanNo ratings yet
- Short CoursesDocument3 pagesShort CoursesSaronga JuliusNo ratings yet
- Regular Expression by Durga SirDocument18 pagesRegular Expression by Durga SirLalitNo ratings yet
- MCU ArchitectureDocument232 pagesMCU Architecturesachinshetty001No ratings yet
- Photoshop Lab Task 2 & 3Document5 pagesPhotoshop Lab Task 2 & 3Zeeshan Bhatti100% (4)
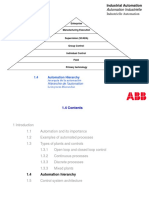
- ABB DCS 140 - HierarchyDocument16 pagesABB DCS 140 - HierarchyMatthewNo ratings yet
- HFSS TutorialDocument31 pagesHFSS TutorialMehdiAlborziNo ratings yet
- Chapter 04 PHP and MysqlDocument49 pagesChapter 04 PHP and MysqlMarichris VenturaNo ratings yet
- Laboratory 2 Hall-Effect Sensors: ME 104 Sensors and Actuators Fall 2003Document13 pagesLaboratory 2 Hall-Effect Sensors: ME 104 Sensors and Actuators Fall 2003Jalaj JainNo ratings yet
- Im Unit 3 DBMS UpdatedDocument93 pagesIm Unit 3 DBMS UpdatedJustin RahulNo ratings yet
- Alienware m17x r3 Service Manual en UsDocument110 pagesAlienware m17x r3 Service Manual en UsAlexis SacarelisNo ratings yet
- 04 Overview of The Internet and The WWWDocument70 pages04 Overview of The Internet and The WWW'mCharity ToniiNo ratings yet
- 11 Pro Max 256GB MG BackupDocument1 page11 Pro Max 256GB MG BackupKondomboNo ratings yet
- Config3 Vendor MasterDocument17 pagesConfig3 Vendor Masteravi_sapmm123No ratings yet
- OS Midterm SolutionDocument4 pagesOS Midterm SolutionRofaelEmil100% (2)
- Typhon Group Ahst Student Tracking System Data EntryDocument1 pageTyphon Group Ahst Student Tracking System Data Entryapi-527782385No ratings yet
- Exercise 06 - Land Use and Sustainability in BrazilDocument31 pagesExercise 06 - Land Use and Sustainability in BrazilJill ClarkNo ratings yet
- Clickshare C-5: Making Presentation Flow in Small, Medium Meeting Rooms and Huddle SpacesDocument3 pagesClickshare C-5: Making Presentation Flow in Small, Medium Meeting Rooms and Huddle SpacesG & M Soft Technologies Pvt LtdNo ratings yet
- Ears Sword & CaseDocument12 pagesEars Sword & CaseGeorgescu BogdanNo ratings yet
- SFC ST Presentation1Document51 pagesSFC ST Presentation1Jose Alberto Herrera OgazNo ratings yet
- CSS ReviewerDocument2 pagesCSS ReviewerLeo SindolNo ratings yet
- Oracle DBA On Unix and LinuxDocument599 pagesOracle DBA On Unix and LinuxRavi DingariNo ratings yet
- TCP Client Test Software - Simply Modbus SoftwareDocument4 pagesTCP Client Test Software - Simply Modbus SoftwareSaber LeffiNo ratings yet