Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- BMW & Mini Option CodesDocument23 pagesBMW & Mini Option CodesTudorel IancuNo ratings yet
- SAM Unit Rear FunctionDocument3 pagesSAM Unit Rear FunctionJohn Eduard Sierra Velandia100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- E-Sys - Flashing ECU GuideDocument17 pagesE-Sys - Flashing ECU GuideTudorel Iancu100% (6)
- E-Sys - Change FA With E-SysDocument9 pagesE-Sys - Change FA With E-SysloboWu100% (1)
- E-Sys - Change FA With E-SysDocument9 pagesE-Sys - Change FA With E-SysloboWu100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Outboard Manual 70 75 80 90 100 115 PDFDocument391 pagesOutboard Manual 70 75 80 90 100 115 PDFTudorel Iancu50% (2)
- Ford - 3543t GCC - Rev4Document6 pagesFord - 3543t GCC - Rev4MakNo ratings yet
- Beginners Guide Coding PDFDocument33 pagesBeginners Guide Coding PDFTudorel IancuNo ratings yet
- Beginners Guide Coding PDFDocument33 pagesBeginners Guide Coding PDFTudorel IancuNo ratings yet
- E-Sys - Getting Started Coding - Part 1Document14 pagesE-Sys - Getting Started Coding - Part 1Tudorel IancuNo ratings yet
- BMW Technical AcronymsDocument6 pagesBMW Technical AcronymsFawaz Al-JasimiNo ratings yet
- LM FAQsDocument5 pagesLM FAQsTudorel IancuNo ratings yet
- Optical Fiber and 10 Gigabit EthernetDocument13 pagesOptical Fiber and 10 Gigabit EthernetTudorel IancuNo ratings yet
- 45 KWDocument7 pages45 KWTudorel IancuNo ratings yet
- Chapter 2 PowerpointDocument23 pagesChapter 2 PowerpointTudorel Iancu100% (2)
- DMAX - Push It To The MaxDocument6 pagesDMAX - Push It To The MaxSirap Laici Ais100% (1)
- Tabela LubrificantesDocument1 pageTabela LubrificantesGEOMARNo ratings yet
- w447 Vito Tourer BrochureDocument35 pagesw447 Vito Tourer BrochureQuincey HarkerNo ratings yet
- New V70 XC70 Owners Manual MY05 en Tp7551Document226 pagesNew V70 XC70 Owners Manual MY05 en Tp7551dynax4No ratings yet
- Mathey Wireline UnitsDocument1 pageMathey Wireline UnitsTri CahyadiNo ratings yet
- Evolve The Ride: New Toyota Rav4 HybridDocument2 pagesEvolve The Ride: New Toyota Rav4 HybridDarthMaulNo ratings yet
- Kalmar English Op Manual T2Document79 pagesKalmar English Op Manual T2ioncacaciosuNo ratings yet
- Elearn FogsDocument7 pagesElearn Fogsapi-3726600100% (2)
- Garrett Catalog V5Document96 pagesGarrett Catalog V5romy94496No ratings yet
- Honda Activa 125 Vs Yamaha Fascino 125 - Compare Prices, Specs, Features at ZigWheelsDocument12 pagesHonda Activa 125 Vs Yamaha Fascino 125 - Compare Prices, Specs, Features at ZigWheelsanon_789699787No ratings yet
- Engine Controls Engine Controls: Page 1 of 5Document6 pagesEngine Controls Engine Controls: Page 1 of 5AUTOMOTRIZ TIPO SPCANo ratings yet
- Spanish Glossary - SituationalDocument6 pagesSpanish Glossary - SituationalRoosevelito MaitreNo ratings yet
- 2016 Jetta Technical Specifications: Jetta 1.4T Jetta 1.8T Jetta 2.0L TDIDocument2 pages2016 Jetta Technical Specifications: Jetta 1.4T Jetta 1.8T Jetta 2.0L TDILobito SolitarioNo ratings yet
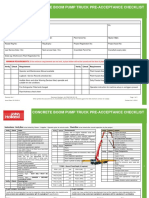
- JH FRM Pae 001 28 Concrete Boom Pump Truck Plant Pre Acceptance ChecklistDocument2 pagesJH FRM Pae 001 28 Concrete Boom Pump Truck Plant Pre Acceptance ChecklistFeroz Gull100% (1)
- Manual Ix20 Hiunday.20Document1 pageManual Ix20 Hiunday.20Ay cuanto leoNo ratings yet
- 67-81 CamaroDocument203 pages67-81 CamarotruckshopNo ratings yet
- Maruti Auto ExpoDocument28 pagesMaruti Auto Exposaifeez18No ratings yet
- Auto Repair GuideDocument16 pagesAuto Repair GuideSandeep DangiNo ratings yet
- Suzuki Alto - WikipediaDocument114 pagesSuzuki Alto - WikipediaMashhood AhmadNo ratings yet
- New Rules For 2014 Makes Formula Racing Green and MeanDocument2 pagesNew Rules For 2014 Makes Formula Racing Green and MeanTapan SantNo ratings yet
- Automobile: Basic Structure and TypesDocument30 pagesAutomobile: Basic Structure and TypesAncy PrinceNo ratings yet
- P1i4v5ijmfm-Full P - 01-21 Dr. Padma Yallapragada Apr-2017Document21 pagesP1i4v5ijmfm-Full P - 01-21 Dr. Padma Yallapragada Apr-2017mujeebc 1972No ratings yet
- Chasis Frame and BodyDocument53 pagesChasis Frame and BodyGeorgy Kurien100% (1)
- 1P Tractor 6B Cab EngDocument2 pages1P Tractor 6B Cab EngHendry PardedeNo ratings yet
- Front Fog Light: 128 HIACE (EWD622E)Document2 pagesFront Fog Light: 128 HIACE (EWD622E)DanielNo ratings yet
- Price List: Toyota Faisalabad MotorsDocument2 pagesPrice List: Toyota Faisalabad Motorsferas55No ratings yet
- Steering GeometryDocument23 pagesSteering Geometryashukmr90No ratings yet