Download as txt, pdf, or txt
You might also like
- GoodWe Modbus Protocol of Inverter - HT - Series 100-250kW V0.11Document16 pagesGoodWe Modbus Protocol of Inverter - HT - Series 100-250kW V0.11biseka4741No ratings yet
- Cat Forklift Ex5000 Operation Maintenance ManualDocument27 pagesCat Forklift Ex5000 Operation Maintenance Manualnancymendoza080295pjo0% (1)
- Pelican Stores Data Analysis ChartDocument17 pagesPelican Stores Data Analysis ChartNaresh Kumar NareshNo ratings yet
- QD75M Training ManualDocument390 pagesQD75M Training ManualNguyen QuocNo ratings yet
- Pp150w-x Om ManualDocument114 pagesPp150w-x Om ManualJet acostaNo ratings yet
- Basic Electric & Hydraulic Wiring Diagram Small Bulldozer (D31EX-22)Document19 pagesBasic Electric & Hydraulic Wiring Diagram Small Bulldozer (D31EX-22)Wahab Abdul100% (2)
- Instructions Manual Te808silverDocument100 pagesInstructions Manual Te808silverMiguel Angel Pavon Carbonell100% (1)
- Diagnostic Codes: MitsubishiDocument12 pagesDiagnostic Codes: Mitsubishiน้องกอย่า วงศ์เครือNo ratings yet
- Cabaero V Hon CantosDocument2 pagesCabaero V Hon CantosjilliankadNo ratings yet
- Joystick Controlled WheelchairDocument3 pagesJoystick Controlled WheelchairAnonymous kw8Yrp0R5rNo ratings yet
- Car Fans c800 Heavy Duty Tool User ManualDocument22 pagesCar Fans c800 Heavy Duty Tool User ManualSer-Od ChuluunbaatarNo ratings yet
- Ucn5833 Bimos II 32-Bit Serial-InputDocument9 pagesUcn5833 Bimos II 32-Bit Serial-InputOlga Plohotnichenko100% (1)
- Izone 400 435 Installation User Manual Nov 2017Document100 pagesIzone 400 435 Installation User Manual Nov 2017Yozi AkgNo ratings yet
- VLF-60KV 0.1Hz Ultra-Low Frequency High Voltage Generator (HV TANK)Document19 pagesVLF-60KV 0.1Hz Ultra-Low Frequency High Voltage Generator (HV TANK)Horacio BerniNo ratings yet
- Implementation of Wireless Sensor Technologies Using Virtual Wire Library For Controlling Alternative Current AppliancesDocument6 pagesImplementation of Wireless Sensor Technologies Using Virtual Wire Library For Controlling Alternative Current AppliancesWARSE JournalsNo ratings yet
- EU 22 Balduzzi Abusing CNC TechnologiesDocument47 pagesEU 22 Balduzzi Abusing CNC TechnologiesHenrik Dalhof JensenNo ratings yet
- DVP ES2 EX2 Instruction SheetDocument19 pagesDVP ES2 EX2 Instruction Sheettoanck86No ratings yet
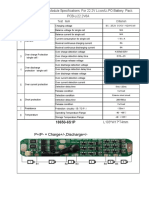
- 6s Pen BMSDocument1 page6s Pen BMSDAVID ROSARIONo ratings yet
- Vector Control Simulation of AC MotorDocument16 pagesVector Control Simulation of AC MotorJosedocampocastro100% (1)
- Digital HourMeter and Counter Z2221N0G2FT00Document6 pagesDigital HourMeter and Counter Z2221N0G2FT00alone160162lNo ratings yet
- Unix Network Programming and Simulation Lab FileDocument42 pagesUnix Network Programming and Simulation Lab FileFateh Singh Rawat0% (1)
- SD b3.031.030 00.000 Bosch Servo Motor ManualDocument40 pagesSD b3.031.030 00.000 Bosch Servo Motor ManualAL KUSCU100% (1)
- JCB JS145 Long Reach ExcavatorDocument6 pagesJCB JS145 Long Reach ExcavatorNitzOONo ratings yet
- IFM Minsk Belarus ABNDocument163 pagesIFM Minsk Belarus ABNanasNo ratings yet
- Stepper Motor Control Using 8051Document7 pagesStepper Motor Control Using 8051hksaifee100% (1)
- MTS-86C 10102Document1 pageMTS-86C 10102Tinsae HailuNo ratings yet
- Specs PDFDocument32 pagesSpecs PDFNiels LandaNo ratings yet
- Mitsubishi PLC FX1S-FX1N-FX2N Series Programming Manual (PDFDrive) PDFDocument466 pagesMitsubishi PLC FX1S-FX1N-FX2N Series Programming Manual (PDFDrive) PDFHandi KsciNo ratings yet
- Re95201 2012-2Document16 pagesRe95201 2012-2Vinod HegdeNo ratings yet
- Mini Hydraulic ExcavatorDocument8 pagesMini Hydraulic ExcavatorYaroslava YatsukNo ratings yet
- As34 GDocument9 pagesAs34 GraranmruNo ratings yet
- Driver DST 3640 For 31 KG CMDocument18 pagesDriver DST 3640 For 31 KG CMWWW.150775.BUGME.PWNo ratings yet
- DTB48 TempController Manual1 3 06 PDFDocument13 pagesDTB48 TempController Manual1 3 06 PDFKevin Borbor100% (1)
- 3VT4 Molded Case PDFDocument17 pages3VT4 Molded Case PDFAnonymous clMeE4g70No ratings yet
- Electronic Control ModuleDocument7 pagesElectronic Control ModuleBroCactusNo ratings yet
- Kenwood - TK-2160 - 3160 Service ManualDocument42 pagesKenwood - TK-2160 - 3160 Service ManualcornelisjjNo ratings yet
- Ejercicios Resueltos de Máquinas TérmicasDocument11 pagesEjercicios Resueltos de Máquinas TérmicasJosepBravoDávilaNo ratings yet
- Combivert: Installation Guide & Operation Manual D-Housing 1-5 HP 230V 1 - 10 HP 480V B Control C Control G ControlDocument52 pagesCombivert: Installation Guide & Operation Manual D-Housing 1-5 HP 230V 1 - 10 HP 480V B Control C Control G ControlAhmet KayurNo ratings yet
- 112 - Power SeatsDocument61 pages112 - Power SeatsGedas GvildysNo ratings yet
- Ic Lab Manual New2Document35 pagesIc Lab Manual New2jietcivilNo ratings yet
- t05 PDFDocument214 pagest05 PDFcunNo ratings yet
- Datasheet PDFDocument2 pagesDatasheet PDFBarkat HussainNo ratings yet
- Chapter 2 TransformersDocument3 pagesChapter 2 TransformersSuktara-Drubatara TaritNo ratings yet
- 8-Bit Single-Chip Microcomputer With Ad Converter D78c10agq Nec Datasheet PDFDocument66 pages8-Bit Single-Chip Microcomputer With Ad Converter D78c10agq Nec Datasheet PDFAnonymous qWeFIfN90No ratings yet
- Siemens: Simatic Hmi Op3 Operator PanelDocument159 pagesSiemens: Simatic Hmi Op3 Operator PanelIulia CernovNo ratings yet
- Delta PLC DVP SS ModelDocument4 pagesDelta PLC DVP SS ModelTarun SonwaneNo ratings yet
- Plug 400 HZDocument6 pagesPlug 400 HZukassyahNo ratings yet
- Electronic Schematic PDFDocument1 pageElectronic Schematic PDFhemenedyNo ratings yet
- Status Report Fruytier 972K Pem00444 DPF A Plus de 140% Soot - PSRPT - 2021-07-28 - 09.36.43Document13 pagesStatus Report Fruytier 972K Pem00444 DPF A Plus de 140% Soot - PSRPT - 2021-07-28 - 09.36.43Jean DiscretNo ratings yet
- Premier 300: CT/VT-Operated Energy MeterDocument2 pagesPremier 300: CT/VT-Operated Energy MeterMohammed Nafis N100% (2)
- ECR First Generation ModelsDocument8 pagesECR First Generation ModelsMMM-MMMNo ratings yet
- 133e Ics FT, LT, PT, TTDocument2 pages133e Ics FT, LT, PT, TTAli Hadi100% (1)
- Numerical Generator Protection Reg216 Reg216 ClassicDocument52 pagesNumerical Generator Protection Reg216 Reg216 ClassicRaviteja NowduruNo ratings yet
- TNC 124 - Technical Manual (EN)Document166 pagesTNC 124 - Technical Manual (EN)JózsefTóthNo ratings yet
- Esa 86 88e PDFDocument97 pagesEsa 86 88e PDFKrishna ChaitanyaNo ratings yet
- EC55B Pro BrochureDocument12 pagesEC55B Pro Brochuredalibor_bogdan100% (1)
- #Include "EEPROM.h"Document5 pages#Include "EEPROM.h"J & K dimensionsNo ratings yet
- STM32 RC Car (Android Control Via Bluetooth)Document9 pagesSTM32 RC Car (Android Control Via Bluetooth)winNo ratings yet
- #Include EEPROM.hDocument4 pages#Include EEPROM.hJaswanth PatnaikNo ratings yet
- Code For Fruit Plucking Robot Using ATMEGA2560Document16 pagesCode For Fruit Plucking Robot Using ATMEGA2560Karthik K V Hathwar100% (2)
- Main Program MonitoringDocument10 pagesMain Program MonitoringBagus NugrohoNo ratings yet
- COS1512 Tutorial 104 Exam InfoDocument7 pagesCOS1512 Tutorial 104 Exam InfoLina Slabbert-van Der WaltNo ratings yet
- The Other Inconvenient Truth - Agriculture PDFDocument3 pagesThe Other Inconvenient Truth - Agriculture PDFTaís Presoto AlvarezNo ratings yet
- EE List - 07 Nov 2018Document143 pagesEE List - 07 Nov 2018Alex LeowNo ratings yet
- Tugas Bahasa InggrisDocument10 pagesTugas Bahasa InggrisHunHan SevenNo ratings yet
- How Do I Manually Boot HP-UX On Integrity (Itanium) Based SystemsDocument6 pagesHow Do I Manually Boot HP-UX On Integrity (Itanium) Based Systemsnilu772008No ratings yet
- MODEL of NCNDADocument11 pagesMODEL of NCNDAYunus ThieNo ratings yet
- Lesson 5 Cover Letter PDFDocument7 pagesLesson 5 Cover Letter PDFJoseph PaucarNo ratings yet
- Computer Science #3Document356 pagesComputer Science #3Sean s Chipanga100% (1)
- Intellipaats Cloud and DevOps Architect Masters CourseDocument13 pagesIntellipaats Cloud and DevOps Architect Masters Coursek2shNo ratings yet
- Notification No. 16/2021 - Central Tax (Rate)Document2 pagesNotification No. 16/2021 - Central Tax (Rate)santanu sanyalNo ratings yet
- Steel PuttyDocument1 pageSteel PuttySiva SubramaniNo ratings yet
- Audit Sur La Restauration Et La Sécurité: Alerte Rouge Dans Les HôpitauxDocument5 pagesAudit Sur La Restauration Et La Sécurité: Alerte Rouge Dans Les HôpitauxL'express Maurice0% (1)
- Squeeze CastingDocument38 pagesSqueeze Castingjishnus100% (1)
- Cases in Torts (Doctrines)Document56 pagesCases in Torts (Doctrines)hmn_scribdNo ratings yet
- Finite Element Analysis of Butterfly ValveDocument13 pagesFinite Element Analysis of Butterfly ValveIJRASETPublicationsNo ratings yet
- Convolutional Neural Networks in Computer Vision: Jochen LangDocument46 pagesConvolutional Neural Networks in Computer Vision: Jochen LangZichao ZhangNo ratings yet
- 0606 s14 QP 22Document16 pages0606 s14 QP 22AKRAMNo ratings yet
- Bernoulli's Principle: Ron Niño Q. AbieraDocument14 pagesBernoulli's Principle: Ron Niño Q. AbieraMaria Chela Shophia Realo MandarioNo ratings yet
- Electrical Installers Guidelines PresentationDocument16 pagesElectrical Installers Guidelines PresentationsamuelmbomasmsNo ratings yet
- Corrective Action PlanDocument3 pagesCorrective Action Plansohail100% (2)
- SANY RSC45 Container Reach Stacker Maintenance Manual - CompressDocument29 pagesSANY RSC45 Container Reach Stacker Maintenance Manual - CompressNoe Voeteran BKD100% (2)
- Class 2Document21 pagesClass 2md sakhwat hossainNo ratings yet
- MGRL Corner 4e SM AISE 14Document36 pagesMGRL Corner 4e SM AISE 14vem arcayanNo ratings yet
- Presentation JSDMDocument10 pagesPresentation JSDMRani RajNo ratings yet
- Basic AccountingDocument25 pagesBasic AccountingMahmoodul Haque100% (3)
- Applying High-Low Method in Separating Mixed Costs Using MS ExcelDocument6 pagesApplying High-Low Method in Separating Mixed Costs Using MS ExcelMochi MaxNo ratings yet
- Catalytic Distillation VersionDocument4 pagesCatalytic Distillation Versionlux0008No ratings yet
- UsersGuide PDFDocument86 pagesUsersGuide PDFArmando Novelo GutierrezNo ratings yet