Download as pdf or txt
You might also like
- Week 3 Homework - Fall 2021Document4 pagesWeek 3 Homework - Fall 2021zuhair khanNo ratings yet
- Decision Theory PresentationDocument35 pagesDecision Theory PresentationEduard Santos Cruz100% (2)
- Hydrologic Statistics: Reading: Chapter 11 in Applied Hydrology Some Slides by Venkatesh MerwadeDocument28 pagesHydrologic Statistics: Reading: Chapter 11 in Applied Hydrology Some Slides by Venkatesh MerwadetsuakNo ratings yet
- Prerequis Esp CondDocument6 pagesPrerequis Esp CondoggyvukovichNo ratings yet
- An Empirical Bayes ApproachDocument7 pagesAn Empirical Bayes Approachcamus CaNo ratings yet
- Handout For The Quantitative Finance Course: Conditional Expectation and Discrete MartingaleDocument4 pagesHandout For The Quantitative Finance Course: Conditional Expectation and Discrete Martingaleferkel28No ratings yet
- Conditional ProbabilityDocument18 pagesConditional ProbabilityalbertopianoflautaNo ratings yet
- 4381 14376 1 PBDocument21 pages4381 14376 1 PBsanjica_307519190No ratings yet
- A Minimalist Construction of The Geometric Algebra: Lemma 1 Ltd. 2nd Floor, 31A Chain Street, Reading UK. RG1 2HXDocument3 pagesA Minimalist Construction of The Geometric Algebra: Lemma 1 Ltd. 2nd Floor, 31A Chain Street, Reading UK. RG1 2HXJames ChapelNo ratings yet
- Instructor: DR - Saleem AL Ashhab Al Ba'At University Mathmatical Class Second Year Master DgreeDocument13 pagesInstructor: DR - Saleem AL Ashhab Al Ba'At University Mathmatical Class Second Year Master DgreeNazmi O. Abu JoudahNo ratings yet
- Quals-F20 Without SolutionsDocument6 pagesQuals-F20 Without SolutionsbassemaeNo ratings yet
- An Introduction To Digital CommunicationsDocument70 pagesAn Introduction To Digital Communicationsihab411No ratings yet
- Solutions To The 72nd William Lowell Putnam Mathematical Competition Saturday, December 3, 2011Document4 pagesSolutions To The 72nd William Lowell Putnam Mathematical Competition Saturday, December 3, 2011bigbigbig90003270No ratings yet
- The Definition and Existence of Conditional ExpectationDocument17 pagesThe Definition and Existence of Conditional Expectationmohammed ibrahim mohammed omerNo ratings yet
- Azm PublishedDocument10 pagesAzm PublishedBirojit DasNo ratings yet
- ProbabilityspaceDocument5 pagesProbabilityspacealonkfirNo ratings yet
- Lectures 10, 11: MollifierDocument9 pagesLectures 10, 11: Mollifiertgb82No ratings yet
- Explicit Solution of Black-Scholes Option Pricing Mathematical Models With An Impulsive Payoff FunctionDocument13 pagesExplicit Solution of Black-Scholes Option Pricing Mathematical Models With An Impulsive Payoff FunctionKamarajugadda Shiv ChaitanyaNo ratings yet
- An Inner Product Formula On Two-Dimensional Complex Hyperbolic SpaceDocument16 pagesAn Inner Product Formula On Two-Dimensional Complex Hyperbolic SpaceJeremy DickmanNo ratings yet
- Stochastic Processes NotesDocument22 pagesStochastic Processes Notesels_872100% (1)
- Lecture 09Document15 pagesLecture 09nandish mehtaNo ratings yet
- Geometric Group TheoryDocument20 pagesGeometric Group TheoryDragan RukavinaNo ratings yet
- sm192 1 03Document9 pagessm192 1 03FaidherRodriguezNo ratings yet
- Statistics DiffusionsDocument66 pagesStatistics DiffusionsGenevieve Magpayo NangitNo ratings yet
- Week13 2Document11 pagesWeek13 2Angelo OppioNo ratings yet
- Def Quant AT1997Document7 pagesDef Quant AT1997Huong Cam ThuyNo ratings yet
- Covariances of ARMA ProcessesDocument9 pagesCovariances of ARMA ProcessesRyan TeehanNo ratings yet
- Notes On The Fourier Transform Definition. The Fourier Transform (FT) Relates A Function To Its Frequency Domain EquivalentDocument23 pagesNotes On The Fourier Transform Definition. The Fourier Transform (FT) Relates A Function To Its Frequency Domain EquivalentRajas KhokleNo ratings yet
- Chap 3Document11 pagesChap 3eklogoNo ratings yet
- Lecture Notes 15 GDocument7 pagesLecture Notes 15 GvahidNo ratings yet
- 00MET03 Metric SpacesDocument5 pages00MET03 Metric SpacesAjoy SharmaNo ratings yet
- The Neighborhood Complex of An Infinite Graph: El Complejo de Entornos de Un Grafo InfinitoDocument6 pagesThe Neighborhood Complex of An Infinite Graph: El Complejo de Entornos de Un Grafo InfinitoRICARDO LUCIO MAMANI SUCANo ratings yet
- Hammersley Clifford PDFDocument3 pagesHammersley Clifford PDFKaiser De Emperana Arkan IVNo ratings yet
- Lec 20Document8 pagesLec 20Angelo OppioNo ratings yet
- Numerical Computation July 30, 2012Document7 pagesNumerical Computation July 30, 2012Damian ButtsNo ratings yet
- StabDocument12 pagesStabSimos SoldatosNo ratings yet
- Sugeno Integral Based On Some InequalitiesDocument4 pagesSugeno Integral Based On Some InequalitiesIOSRjournalNo ratings yet
- Transformations of Random Variables: September, 2009Document5 pagesTransformations of Random Variables: September, 20096doitNo ratings yet
- Jian ZhouDocument39 pagesJian ZhouΓιάννης ΣτεργίουNo ratings yet
- Jian ZhouDocument39 pagesJian ZhouΓιάννης ΣτεργίουNo ratings yet
- Jian ZhouDocument39 pagesJian ZhouΓιάννης ΣτεργίουNo ratings yet
- Research Article: The Least Eigenvalue of The Complement of The Square Power Graph of GDocument4 pagesResearch Article: The Least Eigenvalue of The Complement of The Square Power Graph of GUsama WaheedNo ratings yet
- Elementary Properties of The Gamma Function: Appendix GDocument9 pagesElementary Properties of The Gamma Function: Appendix Gmoh_abd288No ratings yet
- Lecture 2 ProbabilityDocument28 pagesLecture 2 ProbabilityJ ChoyNo ratings yet
- Lecture 5Document4 pagesLecture 5Leoj Levamor D. AgumbayNo ratings yet
- Spectral Element Approximation of Fredholm Integral Eigenvalue ProblemsDocument21 pagesSpectral Element Approximation of Fredholm Integral Eigenvalue ProblemsAnonymous 1Yc9wYDtNo ratings yet
- Chap 5 PMEDocument48 pagesChap 5 PMEFarhan Khan NiaZiNo ratings yet
- Quals-S21 Without SolutionsDocument6 pagesQuals-S21 Without SolutionsbassemaeNo ratings yet
- SAA For JCCDocument18 pagesSAA For JCCShu-Bo YangNo ratings yet
- Solutions To The 84th William Lowell Putnam Mathematical Competition Saturday, December 2, 2023Document5 pagesSolutions To The 84th William Lowell Putnam Mathematical Competition Saturday, December 2, 2023Anh PhươngNo ratings yet
- Matrix ManipulatonDocument23 pagesMatrix ManipulatonducthienhuaNo ratings yet
- Inequalities For Symmetric Means: Allison Cuttler, Curtis Greene, and Mark SkanderaDocument8 pagesInequalities For Symmetric Means: Allison Cuttler, Curtis Greene, and Mark SkanderaGeorge KaragiannidisNo ratings yet
- Testing For Spectral Granger Causality: 15, Number 4, Pp. 1157-1166Document10 pagesTesting For Spectral Granger Causality: 15, Number 4, Pp. 1157-1166Shakti ShivaNo ratings yet
- Informationtheory-Lecture Slides-A1 Solutions 5037558613Document0 pagesInformationtheory-Lecture Slides-A1 Solutions 5037558613gowthamkurriNo ratings yet
- Lagrange Multipliers Can Fail To Determine Extrema: AcknowledgmentDocument3 pagesLagrange Multipliers Can Fail To Determine Extrema: Acknowledgmentarvind lakshmi ranjan100% (2)
- CA Exercises 20121013 FallDocument13 pagesCA Exercises 20121013 FallMoussaf LyrkenNo ratings yet
- CorrespondencesDocument13 pagesCorrespondencesAllen BrownNo ratings yet
- APA Lecture Notes Part2Document21 pagesAPA Lecture Notes Part2Sheela ShivaramNo ratings yet
- Successive Over Relaxation MethodDocument5 pagesSuccessive Over Relaxation MethodSanjeevanNo ratings yet
- Pde 7Document9 pagesPde 7sahlewel weldemichaelNo ratings yet
- Lecture 5Document2 pagesLecture 5Scott TubmanNo ratings yet
- MATH 231-Statistics-Hira Nadeem PDFDocument3 pagesMATH 231-Statistics-Hira Nadeem PDFOsamaNo ratings yet
- Introduction To Data Analysis SolutionsDocument5 pagesIntroduction To Data Analysis SolutionsOumaima ZiatNo ratings yet
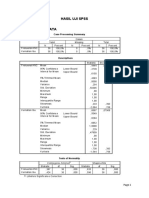
- Hasil Uji Spss A. Normalitas Data: Valid Missing Total CasesDocument5 pagesHasil Uji Spss A. Normalitas Data: Valid Missing Total Casesakbartop1No ratings yet
- Binomial DistributionDocument14 pagesBinomial DistributionbulletproofsouljaNo ratings yet
- CH 6 Rev QuesDocument2 pagesCH 6 Rev QuesjanellennuiNo ratings yet
- Monte Carlo Sampling MethodsDocument25 pagesMonte Carlo Sampling Methodsnyj martinNo ratings yet
- Binomial and PoissonDocument7 pagesBinomial and PoissonMikail Lloyd LaguraNo ratings yet
- The Normal Distribution: Business StatisticsDocument30 pagesThe Normal Distribution: Business StatisticsABDIHAFID HASSANNo ratings yet
- Graded Quiz - Using Probability Distributions - CourseraDocument10 pagesGraded Quiz - Using Probability Distributions - CourseranguyenvandongNo ratings yet
- Sample 8065Document11 pagesSample 8065abhi spdy0% (1)
- MAT 3103: Computational Statistics and Probability Chapter 3: ProbabilityDocument23 pagesMAT 3103: Computational Statistics and Probability Chapter 3: ProbabilityShahriar MahirNo ratings yet
- Statistics in Engineering With Examples in MATLAB and R Second Edition Chapman Hall CRC Texts in Statistical Science Andrew MetcalfeDocument54 pagesStatistics in Engineering With Examples in MATLAB and R Second Edition Chapman Hall CRC Texts in Statistical Science Andrew Metcalfeerica.delarosa185100% (1)
- Universitas Mercu Buana: Fakultas: Teknik Program Studi / Jenjang: Teknik Sipil / S1Document3 pagesUniversitas Mercu Buana: Fakultas: Teknik Program Studi / Jenjang: Teknik Sipil / S1Azizah IstiqozahNo ratings yet
- E - /PQT/PQT UNIT 1 - 5 PDFDocument43 pagesE - /PQT/PQT UNIT 1 - 5 PDFKimharly VersozaNo ratings yet
- ABET Syllabus CEE 309 2018 (3 Pages)Document3 pagesABET Syllabus CEE 309 2018 (3 Pages)jhgjghNo ratings yet
- Confidence Intervals For Variances and Standard DeviationsDocument2 pagesConfidence Intervals For Variances and Standard DeviationsdurgaNo ratings yet
- Frequentist vs. Bayesian Statistics Frequentist Thinking Bayesian ThinkingDocument18 pagesFrequentist vs. Bayesian Statistics Frequentist Thinking Bayesian ThinkingAbhrodeepChandaNo ratings yet
- POWERPOINT Q4 W7 Counting The Number of Occurrences of An Outcome in An Experiment June 29 2021Document30 pagesPOWERPOINT Q4 W7 Counting The Number of Occurrences of An Outcome in An Experiment June 29 2021MyleneNo ratings yet
- Admission Brochure For PHD Admission Test: First Semester 2014-15 IndexDocument13 pagesAdmission Brochure For PHD Admission Test: First Semester 2014-15 IndexAnjnaKandariNo ratings yet
- 8 - Statistical Intervals For A Single SampleDocument53 pages8 - Statistical Intervals For A Single Sample65011536No ratings yet
- Course Outines Statistical Inference (QTM-522)Document15 pagesCourse Outines Statistical Inference (QTM-522)Faizan JunaidNo ratings yet
- Operation On Single Random VariableDocument52 pagesOperation On Single Random VariableHimaBindu ValivetiNo ratings yet
- Categorical Data Analysis With SAS and SPSS ApplicationsDocument576 pagesCategorical Data Analysis With SAS and SPSS Applicationsyas100% (1)
- S2 Vol2 JointcontsdistributionsDocument81 pagesS2 Vol2 Jointcontsdistributionspriya negiNo ratings yet
- ARCH Effect Explained (Excel)Document7 pagesARCH Effect Explained (Excel)NumXL Pro100% (2)
- Conf IntDocument1 pageConf IntAnastasia SusciucNo ratings yet
- Regression Vs Kalman FilterDocument68 pagesRegression Vs Kalman FilterMinh HoangNo ratings yet