
Facets of The ST Poly Tope
Facets of The ST Poly Tope
You might also like
- Quality Tools: Failure Mode and Effects AnalysisDocument3 pagesQuality Tools: Failure Mode and Effects AnalysisAl RammohanNo ratings yet
- Facets of The (S, T) P-Path Polytope: R Udiger StephanDocument27 pagesFacets of The (S, T) P-Path Polytope: R Udiger StephanJimNo ratings yet
- PR E-Publica C Oes Do Departamento de Matem Atica Universidade de Coimbra Preprint Number 07-11Document23 pagesPR E-Publica C Oes Do Departamento de Matem Atica Universidade de Coimbra Preprint Number 07-11ha nadNo ratings yet
- Computing Geodesic Furthest Neighbors in Simple PolygonsDocument16 pagesComputing Geodesic Furthest Neighbors in Simple PolygonsSammitaChakravartiNo ratings yet
- Bergman-Schiffer1951 Article KernelFunctionsAndPartialDiffeDocument12 pagesBergman-Schiffer1951 Article KernelFunctionsAndPartialDiffeAdrian Calin MurzaNo ratings yet
- 1 s2.0 0022404977900305 MainDocument14 pages1 s2.0 0022404977900305 Mainwlrsw101No ratings yet
- Deviation-Angle and Trajectory Statistics For Inertial Particles in TurbulenceDocument5 pagesDeviation-Angle and Trajectory Statistics For Inertial Particles in TurbulencescribddownloadfileNo ratings yet
- CSC373 Assignment 1 Solutions Spring 2012Document6 pagesCSC373 Assignment 1 Solutions Spring 2012yellowmoogNo ratings yet
- BF 02355320Document9 pagesBF 02355320Wang FudongNo ratings yet
- A Characterization of PositiveDocument16 pagesA Characterization of PositiveThiago NobreNo ratings yet
- L07 NotesDocument4 pagesL07 Notesabu453014No ratings yet
- 443 Bit BoundaryDocument5 pages443 Bit BoundarySaint-CyrNo ratings yet
- 11792-PDF File-45598-2-10-20230710Document26 pages11792-PDF File-45598-2-10-20230710bwzfacgbdjapqbpuywNo ratings yet
- CDTR 9464Document8 pagesCDTR 9464Darwin Purba SNo ratings yet
- Nonzero Sum Linear Quadratic Stochastic Differential Games and Backward Forward EquationsDocument15 pagesNonzero Sum Linear Quadratic Stochastic Differential Games and Backward Forward Equationstakamiya980921No ratings yet
- Fuzzy Threshold GraphDocument6 pagesFuzzy Threshold GraphSovan SamantaNo ratings yet
- Satyan L. Devadoss, Rahul Shah, Xuancheng Shao and Ezra Winston - Visibility Graphs and Deformations of AssociahedraDocument18 pagesSatyan L. Devadoss, Rahul Shah, Xuancheng Shao and Ezra Winston - Visibility Graphs and Deformations of AssociahedraSwertyyNo ratings yet
- Appl. Sci. Res.: Some Generalizations of The Schwarz-Christoffel Mapping FormulaDocument13 pagesAppl. Sci. Res.: Some Generalizations of The Schwarz-Christoffel Mapping FormulaAsih Tri MariniNo ratings yet
- Gaussian Quadrature Formulas For The NumDocument2 pagesGaussian Quadrature Formulas For The NumStevo JaćimovskiNo ratings yet
- Even PathDocument6 pagesEven PathBader Alan Na'eem TuringNo ratings yet
- 1 s2.0 S0024379508003352 Main PDFDocument14 pages1 s2.0 S0024379508003352 Main PDFAbaid RehmanNo ratings yet
- App1 PDFDocument7 pagesApp1 PDFTheGodFather16No ratings yet
- Tarn ThesisDocument50 pagesTarn Thesiswobo4904No ratings yet
- On P-Adic Path IntegralDocument5 pagesOn P-Adic Path Integralבניה שטיינמץNo ratings yet
- Materi Kuliah Ke - 6Document46 pagesMateri Kuliah Ke - 6Jahfal JunarlinNo ratings yet
- Characterizing The Vertex Neighbourhoods of Semi-Regular Polyhedra, by T. R. S. WalshDocument7 pagesCharacterizing The Vertex Neighbourhoods of Semi-Regular Polyhedra, by T. R. S. Walshjon.ingramNo ratings yet
- On The Transport-Diffusion Algorithm and Its Applications To The Navier-Stokes EquationsDocument24 pagesOn The Transport-Diffusion Algorithm and Its Applications To The Navier-Stokes EquationsNguyễn Quang HuyNo ratings yet
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)From EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)No ratings yet
- Integral Formulas and An Explicit Version of The Fundamental PrincipleDocument15 pagesIntegral Formulas and An Explicit Version of The Fundamental PrincipleAshish KumarNo ratings yet
- Math 4441 - Fall 2013 Homework 1Document2 pagesMath 4441 - Fall 2013 Homework 1itz1223No ratings yet
- Multivariable Knill 2019 PDFDocument117 pagesMultivariable Knill 2019 PDFjun lideNo ratings yet
- N 1 2 N 1 N 1 N N IDocument9 pagesN 1 2 N 1 N 1 N N IfulltroutNo ratings yet
- Kawai P HarmonicDocument8 pagesKawai P Harmonicrares mirveaNo ratings yet
- Singularities of Holomorphic Foliations: To S. S. Chern & D. C. Spencer On Their 60th BirthdaysDocument64 pagesSingularities of Holomorphic Foliations: To S. S. Chern & D. C. Spencer On Their 60th BirthdaysandreNo ratings yet
- (Kesten, 1986) The Incipient Infinite Cluster in Two-Dimensional PercolationDocument26 pages(Kesten, 1986) The Incipient Infinite Cluster in Two-Dimensional PercolationFardad PouranNo ratings yet
- A FIBONACCI LATTICE (P.STANLEY 提出fibonacci lattice)Document18 pagesA FIBONACCI LATTICE (P.STANLEY 提出fibonacci lattice)吴章贵No ratings yet
- Acta Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationDocument42 pagesActa Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationArmando Treibich KohnNo ratings yet
- 1981-Date-Kashiwara-Miwa-Vertex Operatprs and Tau Func.-Transformation Groups For Solitons Eq.-Proc - Jpn.Acad.Document6 pages1981-Date-Kashiwara-Miwa-Vertex Operatprs and Tau Func.-Transformation Groups For Solitons Eq.-Proc - Jpn.Acad.mm.mm.mabcmNo ratings yet
- 1950 - Paper - Information Retrieval Viewed As Temporal SignallingDocument12 pages1950 - Paper - Information Retrieval Viewed As Temporal SignallingDerek GreenNo ratings yet
- The Catenary and Tame Degree in Finitely Generated Commutative Cancellative MonoidsDocument11 pagesThe Catenary and Tame Degree in Finitely Generated Commutative Cancellative MonoidsRajesh ParekhNo ratings yet
- On The Dispersion of A Solute in A Fluid Flowing Through A TubeDocument11 pagesOn The Dispersion of A Solute in A Fluid Flowing Through A TubeCoraKiriNo ratings yet
- Katarzyna Pietruska-Paluba - The Reflected Brownian Motion On The Sierpinski GasketDocument14 pagesKatarzyna Pietruska-Paluba - The Reflected Brownian Motion On The Sierpinski GasketIrokkNo ratings yet
- Fast Parallel Algorithms For Testing K-Connectivity of Directed and Undirected GraphsDocument5 pagesFast Parallel Algorithms For Testing K-Connectivity of Directed and Undirected GraphsYakov AbramsNo ratings yet
- Determinants, Paths, and Plane Partitions: k k k i i i i k k π (1) π (k)Document36 pagesDeterminants, Paths, and Plane Partitions: k k k i i i i k k π (1) π (k)mirceamercaNo ratings yet
- Collocated FVMDocument17 pagesCollocated FVMapoorvs75No ratings yet
- Tian's Invariant of The Grassmann Manifold: Iizii 2)Document11 pagesTian's Invariant of The Grassmann Manifold: Iizii 2)AlbertNo ratings yet
- Marle 1997Document10 pagesMarle 1997Eduardo VelascoNo ratings yet
- On Maximal Paths and Circuits Erods GallaiDocument20 pagesOn Maximal Paths and Circuits Erods GallaiLorenzo GregorisNo ratings yet
- SIMPLE Method On Non-Staggered Grids PDFDocument12 pagesSIMPLE Method On Non-Staggered Grids PDFAlejandro BecerraNo ratings yet
- Studies in Geometry: 1 TesselatorsDocument12 pagesStudies in Geometry: 1 Tesselatorsjantarmantar12No ratings yet
- Gutierrez Counter ExampleDocument23 pagesGutierrez Counter ExampleFábio CastroNo ratings yet
- 01-jgsp-13-2009-75-88-THE LOXODROME ON AN ELLIPSOID OF REVOLUTIONDocument14 pages01-jgsp-13-2009-75-88-THE LOXODROME ON AN ELLIPSOID OF REVOLUTIONdfmolinaNo ratings yet
- Minimal Sets of Foliations On Complex Projective Space - C Camacho, A L Neto, P SadDocument17 pagesMinimal Sets of Foliations On Complex Projective Space - C Camacho, A L Neto, P SadJimmy Támara AlbinoNo ratings yet
- Milnor Total CurvatureDocument11 pagesMilnor Total CurvatureAnonymous j6r5KRtrH2No ratings yet
- GSM 107 PrevDocument19 pagesGSM 107 PrevAngelo OppioNo ratings yet
- Ramis-Short Introduction To Differential Galois TheoryDocument19 pagesRamis-Short Introduction To Differential Galois TheoryAriel BorgesNo ratings yet
- Brane Embeddings in Sphere Submanifolds: Nikos Karaiskos, Konstadinos Sfetsos and Efstratios TsatisDocument16 pagesBrane Embeddings in Sphere Submanifolds: Nikos Karaiskos, Konstadinos Sfetsos and Efstratios TsatisistarhirNo ratings yet
- HW 4Document4 pagesHW 4Happy manNo ratings yet
- CR ExtensionDocument19 pagesCR ExtensionRodrigo MendesNo ratings yet
- R, N ( P, P ) : Introduction and Basic PropertiesDocument4 pagesR, N ( P, P ) : Introduction and Basic PropertiesRidhi KhuranaNo ratings yet
- AbstractDocument19 pagesAbstractlancejoe2020No ratings yet
- End-of-Sale and End-of-Life Announcement For The Cisco Nexus 3500 Series SwitchesDocument3 pagesEnd-of-Sale and End-of-Life Announcement For The Cisco Nexus 3500 Series SwitchesbakacpasaNo ratings yet
- Excel Cash BookDocument16 pagesExcel Cash BookzeeshanNo ratings yet
- Sa 3Document44 pagesSa 3Lucian CucliNo ratings yet
- Alert ViewsDocument12 pagesAlert ViewsRajasekhjar MatamNo ratings yet
- Lecture 1 - Introduction To Optimization PDFDocument31 pagesLecture 1 - Introduction To Optimization PDFRagnarokNo ratings yet
- Changing Probe Settings: Probe Settings Can Be Configured Using Trigger LogicDocument4 pagesChanging Probe Settings: Probe Settings Can Be Configured Using Trigger Logicvictor luisNo ratings yet
- Ps VersionDocument465 pagesPs VersionLPK974No ratings yet
- Itunes DiagnosticsDocument2 pagesItunes Diagnosticsarviya972No ratings yet
- FileNet OverviewDocument25 pagesFileNet Overviewg8achieverNo ratings yet
- Openwind Tutorial: ../tutorial - Data/Gis/Shape - Vectors/ and Select All The Shape Files in That Directory. ThenDocument18 pagesOpenwind Tutorial: ../tutorial - Data/Gis/Shape - Vectors/ and Select All The Shape Files in That Directory. ThenStaffs INSNo ratings yet
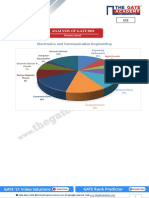
- Analysis of Gate 2021: Electronics and Communication EngineeringDocument11 pagesAnalysis of Gate 2021: Electronics and Communication EngineeringShivani Ekant YadavNo ratings yet
- Official Program of The ASME-JSME-KSME Joint Fluids Engineering 2011Document104 pagesOfficial Program of The ASME-JSME-KSME Joint Fluids Engineering 2011Syeilendra Pramuditya100% (1)
- Victron Pylontech Up2500 Us2000 Us3000 Us2000c Us3000c Up5000 Phantom-S Force-L1 l2Document14 pagesVictron Pylontech Up2500 Us2000 Us3000 Us2000c Us3000c Up5000 Phantom-S Force-L1 l2Enrique Escobar PérezNo ratings yet
- Global Checklist: Form Checklist Maintenance Remote WirelineDocument5 pagesGlobal Checklist: Form Checklist Maintenance Remote WirelineRiyanNo ratings yet
- CT042-3-1-IDB-Week 11Document40 pagesCT042-3-1-IDB-Week 11小垃圾No ratings yet
- Reliability Data of Omron ComponentsDocument1 pageReliability Data of Omron Componentsastojadin1873No ratings yet
- Ec3353 Electronic Devices and Circuits 1807873807 Ec3353 Electronic Devices and Circuits Lecture Notes 1Document216 pagesEc3353 Electronic Devices and Circuits 1807873807 Ec3353 Electronic Devices and Circuits Lecture Notes 1sukhmancheema86No ratings yet
- ForschungenZurDeutschenGeschichte16 1876 TextDocument644 pagesForschungenZurDeutschenGeschichte16 1876 TextBieito Márques CastroNo ratings yet
- OptoVue Iseries BrochureDocument12 pagesOptoVue Iseries BrochureHaag-Streit UK (HS-UK)No ratings yet
- HP Pavilion DV Series LaptopDocument28 pagesHP Pavilion DV Series Laptoprupesh19No ratings yet
- Database Management System Assignment No. 6Document5 pagesDatabase Management System Assignment No. 6Shrikrishna KadamNo ratings yet
- CST Studio Suite - Getting StartedDocument81 pagesCST Studio Suite - Getting StartedRaktim GuhaNo ratings yet
- AutoTrack MasterDocument521 pagesAutoTrack Masterflav1000No ratings yet
- High Speed Elevators (TIME & SPACE) (200712)Document15 pagesHigh Speed Elevators (TIME & SPACE) (200712)Arky HarkyanNo ratings yet
- SAP CO Product Cost Controlling Transaction CodesDocument25 pagesSAP CO Product Cost Controlling Transaction CodesveysiyigitNo ratings yet
- Mini ProjectDocument75 pagesMini ProjectPablo EspositoNo ratings yet
- Contoh Full Resume in EnglishDocument3 pagesContoh Full Resume in Englishtiepioneer100% (2)
- Google Cloud EssentialDocument19 pagesGoogle Cloud EssentialAnkur Singh100% (1)
- BSC-101 Manual v.2 (With Relay)Document78 pagesBSC-101 Manual v.2 (With Relay)Loreto GallardoNo ratings yet
























































































Download as pdf or txt
You might also like
- Quality Tools: Failure Mode and Effects AnalysisDocument3 pagesQuality Tools: Failure Mode and Effects AnalysisAl RammohanNo ratings yet
- Facets of The (S, T) P-Path Polytope: R Udiger StephanDocument27 pagesFacets of The (S, T) P-Path Polytope: R Udiger StephanJimNo ratings yet
- PR E-Publica C Oes Do Departamento de Matem Atica Universidade de Coimbra Preprint Number 07-11Document23 pagesPR E-Publica C Oes Do Departamento de Matem Atica Universidade de Coimbra Preprint Number 07-11ha nadNo ratings yet
- Computing Geodesic Furthest Neighbors in Simple PolygonsDocument16 pagesComputing Geodesic Furthest Neighbors in Simple PolygonsSammitaChakravartiNo ratings yet
- Bergman-Schiffer1951 Article KernelFunctionsAndPartialDiffeDocument12 pagesBergman-Schiffer1951 Article KernelFunctionsAndPartialDiffeAdrian Calin MurzaNo ratings yet
- 1 s2.0 0022404977900305 MainDocument14 pages1 s2.0 0022404977900305 Mainwlrsw101No ratings yet
- Deviation-Angle and Trajectory Statistics For Inertial Particles in TurbulenceDocument5 pagesDeviation-Angle and Trajectory Statistics For Inertial Particles in TurbulencescribddownloadfileNo ratings yet
- CSC373 Assignment 1 Solutions Spring 2012Document6 pagesCSC373 Assignment 1 Solutions Spring 2012yellowmoogNo ratings yet
- BF 02355320Document9 pagesBF 02355320Wang FudongNo ratings yet
- A Characterization of PositiveDocument16 pagesA Characterization of PositiveThiago NobreNo ratings yet
- L07 NotesDocument4 pagesL07 Notesabu453014No ratings yet
- 443 Bit BoundaryDocument5 pages443 Bit BoundarySaint-CyrNo ratings yet
- 11792-PDF File-45598-2-10-20230710Document26 pages11792-PDF File-45598-2-10-20230710bwzfacgbdjapqbpuywNo ratings yet
- CDTR 9464Document8 pagesCDTR 9464Darwin Purba SNo ratings yet
- Nonzero Sum Linear Quadratic Stochastic Differential Games and Backward Forward EquationsDocument15 pagesNonzero Sum Linear Quadratic Stochastic Differential Games and Backward Forward Equationstakamiya980921No ratings yet
- Fuzzy Threshold GraphDocument6 pagesFuzzy Threshold GraphSovan SamantaNo ratings yet
- Satyan L. Devadoss, Rahul Shah, Xuancheng Shao and Ezra Winston - Visibility Graphs and Deformations of AssociahedraDocument18 pagesSatyan L. Devadoss, Rahul Shah, Xuancheng Shao and Ezra Winston - Visibility Graphs and Deformations of AssociahedraSwertyyNo ratings yet
- Appl. Sci. Res.: Some Generalizations of The Schwarz-Christoffel Mapping FormulaDocument13 pagesAppl. Sci. Res.: Some Generalizations of The Schwarz-Christoffel Mapping FormulaAsih Tri MariniNo ratings yet
- Gaussian Quadrature Formulas For The NumDocument2 pagesGaussian Quadrature Formulas For The NumStevo JaćimovskiNo ratings yet
- Even PathDocument6 pagesEven PathBader Alan Na'eem TuringNo ratings yet
- 1 s2.0 S0024379508003352 Main PDFDocument14 pages1 s2.0 S0024379508003352 Main PDFAbaid RehmanNo ratings yet
- App1 PDFDocument7 pagesApp1 PDFTheGodFather16No ratings yet
- Tarn ThesisDocument50 pagesTarn Thesiswobo4904No ratings yet
- On P-Adic Path IntegralDocument5 pagesOn P-Adic Path Integralבניה שטיינמץNo ratings yet
- Materi Kuliah Ke - 6Document46 pagesMateri Kuliah Ke - 6Jahfal JunarlinNo ratings yet
- Characterizing The Vertex Neighbourhoods of Semi-Regular Polyhedra, by T. R. S. WalshDocument7 pagesCharacterizing The Vertex Neighbourhoods of Semi-Regular Polyhedra, by T. R. S. Walshjon.ingramNo ratings yet
- On The Transport-Diffusion Algorithm and Its Applications To The Navier-Stokes EquationsDocument24 pagesOn The Transport-Diffusion Algorithm and Its Applications To The Navier-Stokes EquationsNguyễn Quang HuyNo ratings yet
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)From EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)No ratings yet
- Integral Formulas and An Explicit Version of The Fundamental PrincipleDocument15 pagesIntegral Formulas and An Explicit Version of The Fundamental PrincipleAshish KumarNo ratings yet
- Math 4441 - Fall 2013 Homework 1Document2 pagesMath 4441 - Fall 2013 Homework 1itz1223No ratings yet
- Multivariable Knill 2019 PDFDocument117 pagesMultivariable Knill 2019 PDFjun lideNo ratings yet
- N 1 2 N 1 N 1 N N IDocument9 pagesN 1 2 N 1 N 1 N N IfulltroutNo ratings yet
- Kawai P HarmonicDocument8 pagesKawai P Harmonicrares mirveaNo ratings yet
- Singularities of Holomorphic Foliations: To S. S. Chern & D. C. Spencer On Their 60th BirthdaysDocument64 pagesSingularities of Holomorphic Foliations: To S. S. Chern & D. C. Spencer On Their 60th BirthdaysandreNo ratings yet
- (Kesten, 1986) The Incipient Infinite Cluster in Two-Dimensional PercolationDocument26 pages(Kesten, 1986) The Incipient Infinite Cluster in Two-Dimensional PercolationFardad PouranNo ratings yet
- A FIBONACCI LATTICE (P.STANLEY 提出fibonacci lattice)Document18 pagesA FIBONACCI LATTICE (P.STANLEY 提出fibonacci lattice)吴章贵No ratings yet
- Acta Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationDocument42 pagesActa Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationArmando Treibich KohnNo ratings yet
- 1981-Date-Kashiwara-Miwa-Vertex Operatprs and Tau Func.-Transformation Groups For Solitons Eq.-Proc - Jpn.Acad.Document6 pages1981-Date-Kashiwara-Miwa-Vertex Operatprs and Tau Func.-Transformation Groups For Solitons Eq.-Proc - Jpn.Acad.mm.mm.mabcmNo ratings yet
- 1950 - Paper - Information Retrieval Viewed As Temporal SignallingDocument12 pages1950 - Paper - Information Retrieval Viewed As Temporal SignallingDerek GreenNo ratings yet
- The Catenary and Tame Degree in Finitely Generated Commutative Cancellative MonoidsDocument11 pagesThe Catenary and Tame Degree in Finitely Generated Commutative Cancellative MonoidsRajesh ParekhNo ratings yet
- On The Dispersion of A Solute in A Fluid Flowing Through A TubeDocument11 pagesOn The Dispersion of A Solute in A Fluid Flowing Through A TubeCoraKiriNo ratings yet
- Katarzyna Pietruska-Paluba - The Reflected Brownian Motion On The Sierpinski GasketDocument14 pagesKatarzyna Pietruska-Paluba - The Reflected Brownian Motion On The Sierpinski GasketIrokkNo ratings yet
- Fast Parallel Algorithms For Testing K-Connectivity of Directed and Undirected GraphsDocument5 pagesFast Parallel Algorithms For Testing K-Connectivity of Directed and Undirected GraphsYakov AbramsNo ratings yet
- Determinants, Paths, and Plane Partitions: k k k i i i i k k π (1) π (k)Document36 pagesDeterminants, Paths, and Plane Partitions: k k k i i i i k k π (1) π (k)mirceamercaNo ratings yet
- Collocated FVMDocument17 pagesCollocated FVMapoorvs75No ratings yet
- Tian's Invariant of The Grassmann Manifold: Iizii 2)Document11 pagesTian's Invariant of The Grassmann Manifold: Iizii 2)AlbertNo ratings yet
- Marle 1997Document10 pagesMarle 1997Eduardo VelascoNo ratings yet
- On Maximal Paths and Circuits Erods GallaiDocument20 pagesOn Maximal Paths and Circuits Erods GallaiLorenzo GregorisNo ratings yet
- SIMPLE Method On Non-Staggered Grids PDFDocument12 pagesSIMPLE Method On Non-Staggered Grids PDFAlejandro BecerraNo ratings yet
- Studies in Geometry: 1 TesselatorsDocument12 pagesStudies in Geometry: 1 Tesselatorsjantarmantar12No ratings yet
- Gutierrez Counter ExampleDocument23 pagesGutierrez Counter ExampleFábio CastroNo ratings yet
- 01-jgsp-13-2009-75-88-THE LOXODROME ON AN ELLIPSOID OF REVOLUTIONDocument14 pages01-jgsp-13-2009-75-88-THE LOXODROME ON AN ELLIPSOID OF REVOLUTIONdfmolinaNo ratings yet
- Minimal Sets of Foliations On Complex Projective Space - C Camacho, A L Neto, P SadDocument17 pagesMinimal Sets of Foliations On Complex Projective Space - C Camacho, A L Neto, P SadJimmy Támara AlbinoNo ratings yet
- Milnor Total CurvatureDocument11 pagesMilnor Total CurvatureAnonymous j6r5KRtrH2No ratings yet
- GSM 107 PrevDocument19 pagesGSM 107 PrevAngelo OppioNo ratings yet
- Ramis-Short Introduction To Differential Galois TheoryDocument19 pagesRamis-Short Introduction To Differential Galois TheoryAriel BorgesNo ratings yet
- Brane Embeddings in Sphere Submanifolds: Nikos Karaiskos, Konstadinos Sfetsos and Efstratios TsatisDocument16 pagesBrane Embeddings in Sphere Submanifolds: Nikos Karaiskos, Konstadinos Sfetsos and Efstratios TsatisistarhirNo ratings yet
- HW 4Document4 pagesHW 4Happy manNo ratings yet
- CR ExtensionDocument19 pagesCR ExtensionRodrigo MendesNo ratings yet
- R, N ( P, P ) : Introduction and Basic PropertiesDocument4 pagesR, N ( P, P ) : Introduction and Basic PropertiesRidhi KhuranaNo ratings yet
- AbstractDocument19 pagesAbstractlancejoe2020No ratings yet
- End-of-Sale and End-of-Life Announcement For The Cisco Nexus 3500 Series SwitchesDocument3 pagesEnd-of-Sale and End-of-Life Announcement For The Cisco Nexus 3500 Series SwitchesbakacpasaNo ratings yet
- Excel Cash BookDocument16 pagesExcel Cash BookzeeshanNo ratings yet
- Sa 3Document44 pagesSa 3Lucian CucliNo ratings yet
- Alert ViewsDocument12 pagesAlert ViewsRajasekhjar MatamNo ratings yet
- Lecture 1 - Introduction To Optimization PDFDocument31 pagesLecture 1 - Introduction To Optimization PDFRagnarokNo ratings yet
- Changing Probe Settings: Probe Settings Can Be Configured Using Trigger LogicDocument4 pagesChanging Probe Settings: Probe Settings Can Be Configured Using Trigger Logicvictor luisNo ratings yet
- Ps VersionDocument465 pagesPs VersionLPK974No ratings yet
- Itunes DiagnosticsDocument2 pagesItunes Diagnosticsarviya972No ratings yet
- FileNet OverviewDocument25 pagesFileNet Overviewg8achieverNo ratings yet
- Openwind Tutorial: ../tutorial - Data/Gis/Shape - Vectors/ and Select All The Shape Files in That Directory. ThenDocument18 pagesOpenwind Tutorial: ../tutorial - Data/Gis/Shape - Vectors/ and Select All The Shape Files in That Directory. ThenStaffs INSNo ratings yet
- Analysis of Gate 2021: Electronics and Communication EngineeringDocument11 pagesAnalysis of Gate 2021: Electronics and Communication EngineeringShivani Ekant YadavNo ratings yet
- Official Program of The ASME-JSME-KSME Joint Fluids Engineering 2011Document104 pagesOfficial Program of The ASME-JSME-KSME Joint Fluids Engineering 2011Syeilendra Pramuditya100% (1)
- Victron Pylontech Up2500 Us2000 Us3000 Us2000c Us3000c Up5000 Phantom-S Force-L1 l2Document14 pagesVictron Pylontech Up2500 Us2000 Us3000 Us2000c Us3000c Up5000 Phantom-S Force-L1 l2Enrique Escobar PérezNo ratings yet
- Global Checklist: Form Checklist Maintenance Remote WirelineDocument5 pagesGlobal Checklist: Form Checklist Maintenance Remote WirelineRiyanNo ratings yet
- CT042-3-1-IDB-Week 11Document40 pagesCT042-3-1-IDB-Week 11小垃圾No ratings yet
- Reliability Data of Omron ComponentsDocument1 pageReliability Data of Omron Componentsastojadin1873No ratings yet
- Ec3353 Electronic Devices and Circuits 1807873807 Ec3353 Electronic Devices and Circuits Lecture Notes 1Document216 pagesEc3353 Electronic Devices and Circuits 1807873807 Ec3353 Electronic Devices and Circuits Lecture Notes 1sukhmancheema86No ratings yet
- ForschungenZurDeutschenGeschichte16 1876 TextDocument644 pagesForschungenZurDeutschenGeschichte16 1876 TextBieito Márques CastroNo ratings yet
- OptoVue Iseries BrochureDocument12 pagesOptoVue Iseries BrochureHaag-Streit UK (HS-UK)No ratings yet
- HP Pavilion DV Series LaptopDocument28 pagesHP Pavilion DV Series Laptoprupesh19No ratings yet
- Database Management System Assignment No. 6Document5 pagesDatabase Management System Assignment No. 6Shrikrishna KadamNo ratings yet
- CST Studio Suite - Getting StartedDocument81 pagesCST Studio Suite - Getting StartedRaktim GuhaNo ratings yet
- AutoTrack MasterDocument521 pagesAutoTrack Masterflav1000No ratings yet
- High Speed Elevators (TIME & SPACE) (200712)Document15 pagesHigh Speed Elevators (TIME & SPACE) (200712)Arky HarkyanNo ratings yet
- SAP CO Product Cost Controlling Transaction CodesDocument25 pagesSAP CO Product Cost Controlling Transaction CodesveysiyigitNo ratings yet
- Mini ProjectDocument75 pagesMini ProjectPablo EspositoNo ratings yet
- Contoh Full Resume in EnglishDocument3 pagesContoh Full Resume in Englishtiepioneer100% (2)
- Google Cloud EssentialDocument19 pagesGoogle Cloud EssentialAnkur Singh100% (1)
- BSC-101 Manual v.2 (With Relay)Document78 pagesBSC-101 Manual v.2 (With Relay)Loreto GallardoNo ratings yet