Download as pdf or txt
You might also like
- Wheelie Trainer First Manual PDFDocument28 pagesWheelie Trainer First Manual PDFGerardo Espinola Cardozo58% (31)
- 10795750-DKP8P8EM-Download Komatsu Pc138us-8 Pc138uslc-8 Excavator ManualDocument946 pages10795750-DKP8P8EM-Download Komatsu Pc138us-8 Pc138uslc-8 Excavator ManualEdison Correa92% (39)
- Walworth API 600 Gate Globe CheckDocument52 pagesWalworth API 600 Gate Globe CheckmttriosNo ratings yet
- TECHLOK Clamp Connector Technical WebversionDocument32 pagesTECHLOK Clamp Connector Technical WebversionAndresNo ratings yet
- Lecture 4C Failure Theory of Isotropic Materials From PopovDocument13 pagesLecture 4C Failure Theory of Isotropic Materials From PopovJoshua KarthikNo ratings yet
- Casing Mechanical Properties: Failure Theory of MaterialsDocument3 pagesCasing Mechanical Properties: Failure Theory of Materialsnikhil_barshettiwatNo ratings yet
- Failure TheoriesDocument15 pagesFailure TheoriesbabeNo ratings yet
- AE-308 Finite Element Method: Problems On Solid MechanicsDocument14 pagesAE-308 Finite Element Method: Problems On Solid MechanicsmeghatvNo ratings yet
- Closed-Form SolutionsDocument13 pagesClosed-Form SolutionsBza ZaBugNo ratings yet
- Theories of Yielding PDFDocument13 pagesTheories of Yielding PDFJowesh Avisheik GoundarNo ratings yet
- 2 Metal Forming 1 & 2Document28 pages2 Metal Forming 1 & 2mameNo ratings yet
- AAG2020 04 ChiangDocument23 pagesAAG2020 04 ChiangHaris MuratiNo ratings yet
- Chapter 01Document42 pagesChapter 01Harry GalungNo ratings yet
- Failure Theories: The Maximum Principal Stress Theory .Document4 pagesFailure Theories: The Maximum Principal Stress Theory .Michael 'El Filósofo'No ratings yet
- Basics of Finite Element AnalysisDocument117 pagesBasics of Finite Element AnalysispgkaeroNo ratings yet
- NOTES Stress Strain STUDENTDocument5 pagesNOTES Stress Strain STUDENTAntonio MateosNo ratings yet
- The Maximum Principal Stress Theory ..: Mohr's CircleDocument2 pagesThe Maximum Principal Stress Theory ..: Mohr's CircleTeja DilipNo ratings yet
- Generalized Hook's Law: Stres-Strain RelationDocument12 pagesGeneralized Hook's Law: Stres-Strain RelationbrintopvNo ratings yet
- Materials & Properties: Mechanical Behaviour: C. GarionDocument19 pagesMaterials & Properties: Mechanical Behaviour: C. GarionJosePeterPintoNo ratings yet
- Theories of FailureDocument23 pagesTheories of FailureDheerajGunwant25% (4)
- Solid MechanicsDocument12 pagesSolid MechanicsÅñírbāñ SārkârNo ratings yet
- Lecture4 3-d Stress Tensor and Equilibrium EquationsDocument18 pagesLecture4 3-d Stress Tensor and Equilibrium Equationssamurai7_77No ratings yet
- Mechanics Prelim Doc ExamDocument11 pagesMechanics Prelim Doc ExamlolaNo ratings yet
- Continuum Mechanics V. Constitutive Equations: Basic AxiomsDocument14 pagesContinuum Mechanics V. Constitutive Equations: Basic AxiomsahishbNo ratings yet
- Theories of Failure 2Document23 pagesTheories of Failure 2Nagendra Manral100% (1)
- To The Theory of Perpetual Motion HolderDocument8 pagesTo The Theory of Perpetual Motion HolderSathyavathi PyNo ratings yet
- Failure Theories: Finite Element Analysis Structural Steel Design Applied Measurements LTDDocument3 pagesFailure Theories: Finite Element Analysis Structural Steel Design Applied Measurements LTDrakicbgNo ratings yet
- Laboratoire de Mdcanique Des Solides, Ecole Polytechnique, F-91128 Palaiseau Cedex, FranceDocument12 pagesLaboratoire de Mdcanique Des Solides, Ecole Polytechnique, F-91128 Palaiseau Cedex, FrancesaberNo ratings yet
- Fea-Finite Element Analysis: Chapter-1 Stress TensorDocument106 pagesFea-Finite Element Analysis: Chapter-1 Stress Tensorkamsubh66No ratings yet
- Chapter2 PDFDocument18 pagesChapter2 PDFamirthraj74No ratings yet
- 3-Problems in ElasticityDocument58 pages3-Problems in Elasticityali381100% (1)
- Reference BooksDocument23 pagesReference BooksIgor Gabriel Teixeira GómezNo ratings yet
- Theories of Elastic FailureDocument15 pagesTheories of Elastic FailurejaishowNo ratings yet
- Failure Criteria PDFDocument3 pagesFailure Criteria PDFShanNo ratings yet
- Distortion Energy NOTESDocument7 pagesDistortion Energy NOTESSüleyman TüreNo ratings yet
- MIT2 080JF13 Lecture2 PDFDocument26 pagesMIT2 080JF13 Lecture2 PDFAbhilashJanaNo ratings yet
- Strengths 9th ChapterDocument20 pagesStrengths 9th Chapteryodahe aberaNo ratings yet
- 2ZahitMtecitogloufeformulation 2015 03-02-12!36!49Document41 pages2ZahitMtecitogloufeformulation 2015 03-02-12!36!49parth daxiniNo ratings yet
- Principle Stress Vs VonmisesDocument6 pagesPrinciple Stress Vs VonmisesMUHAMMAD BILAL SHAHNo ratings yet
- Theory of FailureDocument10 pagesTheory of FailureAnonymous 9LRI5EpbNo ratings yet
- Two-Dimensional Coupled Solution ForDocument17 pagesTwo-Dimensional Coupled Solution ForrudysergeNo ratings yet
- MEC 3611: Structural Mechanics: Lecture 3: REVIEWDocument22 pagesMEC 3611: Structural Mechanics: Lecture 3: REVIEWhellolover0% (1)
- Constitutive Equations and Linear Elasticity: Fall, 2006Document41 pagesConstitutive Equations and Linear Elasticity: Fall, 2006Jet BesacruzNo ratings yet
- Topic 2 - Airy Stress FunctionDocument20 pagesTopic 2 - Airy Stress FunctionJoshua Mamouney100% (2)
- 767 - Ch5. 1D ThermoelasticityDocument18 pages767 - Ch5. 1D ThermoelasticityFelipe Carrasco DuránNo ratings yet
- Elastic Stiffness Constant Simran Pawar Roll No 722156Document22 pagesElastic Stiffness Constant Simran Pawar Roll No 722156KritiiNo ratings yet
- Complex Stress Tutorial 3 Complex Stress and Strain: © D.J.Dunn 1Document22 pagesComplex Stress Tutorial 3 Complex Stress and Strain: © D.J.Dunn 1Php TutorialsNo ratings yet
- Crack Propagation Analysis: Miguel Patr Icio Robert M.M. MattheijDocument28 pagesCrack Propagation Analysis: Miguel Patr Icio Robert M.M. MattheijOussama BouaraquiaNo ratings yet
- MIT3 11F99 AiryDocument14 pagesMIT3 11F99 AiryADITYANo ratings yet
- Yield Criteria PDFDocument11 pagesYield Criteria PDFTarza Bayez100% (1)
- 3 D LectureDocument36 pages3 D LectureAisha AbuzgaiaNo ratings yet
- Mech - Eng 362 Stress Analysis Analysis of StructuresDocument19 pagesMech - Eng 362 Stress Analysis Analysis of StructuresGurubasavaraju T MNo ratings yet
- Principal StressesDocument13 pagesPrincipal StressesSathish SelvaNo ratings yet
- Verification of Stress Components Determined by ExDocument10 pagesVerification of Stress Components Determined by ExRafaela RibeiroNo ratings yet
- Entropy 19 00503 PDFDocument12 pagesEntropy 19 00503 PDFPudretexDNo ratings yet
- Theories of FailureDocument27 pagesTheories of Failuremuzamillover1No ratings yet
- MDP3530 Lecture 3Document23 pagesMDP3530 Lecture 3Mark Nassef NaguibNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
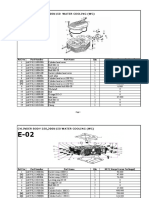
- KATALOG NOZOMI 250200150 Water Cooler Het 2022 LockedDocument76 pagesKATALOG NOZOMI 250200150 Water Cooler Het 2022 LockedMan GezaNo ratings yet
- Engine Control System Circuit Diagram: Without This Message by Purchasing NovapdfDocument3 pagesEngine Control System Circuit Diagram: Without This Message by Purchasing NovapdfJose Luis Gutierrez TamayoNo ratings yet
- SM Xc500carbDocument350 pagesSM Xc500carbRadulf PugnusNo ratings yet
- BMW ErrorsDocument10 pagesBMW ErrorsPawluch0% (1)
- Panasonic ServoDocument194 pagesPanasonic ServoHussein Rammal100% (1)
- TemplifierDocument8 pagesTemplifiermdalt9180100% (1)
- DYNA 70025 APECS Integrated Actuator: For Stanadyne "D" Series Injection PumpsDocument16 pagesDYNA 70025 APECS Integrated Actuator: For Stanadyne "D" Series Injection PumpsmichaeltibocheNo ratings yet
- UntitledDocument12 pagesUntitledFHGDTY? HNo ratings yet
- PFI ES-22-1995 Recommended Practice For Color Coding of Piping MaterialsDocument4 pagesPFI ES-22-1995 Recommended Practice For Color Coding of Piping MaterialsThao Nguyen100% (1)
- PT BMI Presentation 29.05.2017Document42 pagesPT BMI Presentation 29.05.2017Bayumi Tirta JayaNo ratings yet
- Development of Thermal Stratification in A Rotating Cryogenic Liquid Hydrogen TankDocument11 pagesDevelopment of Thermal Stratification in A Rotating Cryogenic Liquid Hydrogen Tankसागर पाटीलNo ratings yet
- Seminar Presentation Gas Power PlantDocument16 pagesSeminar Presentation Gas Power PlantGautam DangiNo ratings yet
- Special Features of The MEGANE Sports TourerDocument102 pagesSpecial Features of The MEGANE Sports Tourerhrc555No ratings yet
- 3 1 7soccergoalDocument15 pages3 1 7soccergoalapi-286060213No ratings yet
- Tier 4 Final Lamps: QSF3.8 QSB4.5 QSB6.7 Qsl9 QSG12 QSX15Document2 pagesTier 4 Final Lamps: QSF3.8 QSB4.5 QSB6.7 Qsl9 QSG12 QSX15Ali SadeghiNo ratings yet
- Bfe FM200 Epfs 000 02 V.0Document52 pagesBfe FM200 Epfs 000 02 V.0SajjadNo ratings yet
- VAV TerminalsDocument18 pagesVAV TerminalsFaquruddinNo ratings yet
- PST QuestionsDocument5 pagesPST QuestionsPRIYANSH JNo ratings yet
- 606EDocument68 pages606ELLNo ratings yet
- Set No. 1Document8 pagesSet No. 1andhracollegesNo ratings yet
- Solid Mechanics - Ii Semester 3 BSC Mechanical Engineering Uet Peshawar, PakistanDocument25 pagesSolid Mechanics - Ii Semester 3 BSC Mechanical Engineering Uet Peshawar, PakistanStylxsh KurriNo ratings yet
- One Steel Hollow Section Properties Nov2004p PDFDocument52 pagesOne Steel Hollow Section Properties Nov2004p PDFphatmatNo ratings yet
- Solution Thermodynamics TheoryDocument36 pagesSolution Thermodynamics TheorynNo ratings yet
- Review MODULE: - HYDRAULICS (Fluid Properties)Document2 pagesReview MODULE: - HYDRAULICS (Fluid Properties)I'm an EngineerNo ratings yet
- Clif Mock CompletoDocument4 pagesClif Mock CompletoJosé Luis CoronadoNo ratings yet
- Wascomat Flatwork Ironer Specifications IC5019 LF OC5021 R LF IC5025 R LF IC5028 R LF IC5032 R LFDocument2 pagesWascomat Flatwork Ironer Specifications IC5019 LF OC5021 R LF IC5025 R LF IC5028 R LF IC5032 R LFmairimsp2003No ratings yet