Download as pdf or txt
You might also like
- 28.2 - Basic PMO Communications PlanDocument3 pages28.2 - Basic PMO Communications PlanandromterNo ratings yet
- The Structure of Economics 1Document36 pagesThe Structure of Economics 1José Luis Castillo B100% (5)
- PileHyp CSM8 User ManualDocument8 pagesPileHyp CSM8 User ManualHafidziNo ratings yet
- Discussion - Design For Eccentric and Inclined Loads On Bolts and Weld GroupsDocument3 pagesDiscussion - Design For Eccentric and Inclined Loads On Bolts and Weld GroupsMansoorNo ratings yet
- Dimensionless Expressions: 4.1 Dimensional AnalysisDocument16 pagesDimensionless Expressions: 4.1 Dimensional AnalysisNoorul AlamNo ratings yet
- Chapter 12Document91 pagesChapter 12Carmen de LeonNo ratings yet
- 1982 - Algorithm 583 LSQR Sparse LinearDocument15 pages1982 - Algorithm 583 LSQR Sparse LinearluongxuandanNo ratings yet
- An Optimal Control of A Second-Order Under-Damped SystemDocument3 pagesAn Optimal Control of A Second-Order Under-Damped SystemÁngeles Campaña OlmosNo ratings yet
- Gries A Note On A Standard Strategy For Developing Loop Invariants and LoopsDocument9 pagesGries A Note On A Standard Strategy For Developing Loop Invariants and LoopsitrejosNo ratings yet
- A Note On A Standard Strategy For Developing Loop Invariants and LoopsDocument8 pagesA Note On A Standard Strategy For Developing Loop Invariants and Loopsjacksonluke2016babyNo ratings yet
- Jos 1999 PaperDocument13 pagesJos 1999 PaperhanvwbNo ratings yet
- Simplified Stability Criterion Linear Discrete Systems : Greatly ImproveDocument8 pagesSimplified Stability Criterion Linear Discrete Systems : Greatly ImprovesakuractNo ratings yet
- Jacquet Modules and Induced Representations: Marko Tadi CDocument23 pagesJacquet Modules and Induced Representations: Marko Tadi CvahidNo ratings yet
- 1999 GuntmanDocument29 pages1999 GuntmanFelipeCarraroNo ratings yet
- Davis Analysis of Active RC Networks by DecompositionDocument3 pagesDavis Analysis of Active RC Networks by Decompositionbenitogaldos19gmail.comNo ratings yet
- Flash Calculation Stability PDFDocument12 pagesFlash Calculation Stability PDFAndre BecNo ratings yet
- Stabilization of An Inverted Pendulum Via Fuzzy Explicit Predictive ControlDocument5 pagesStabilization of An Inverted Pendulum Via Fuzzy Explicit Predictive ControlVirgili0No ratings yet
- Experiments On The Minimum Linear Arrangement Problem: Jordi PetitDocument29 pagesExperiments On The Minimum Linear Arrangement Problem: Jordi PetitPhat LuongNo ratings yet
- Response To Reviewers' Comments For Manuscript IEEE L-CSS 20-0350, Version 1Document13 pagesResponse To Reviewers' Comments For Manuscript IEEE L-CSS 20-0350, Version 1Muhammad Royyan ZahirNo ratings yet
- TR (Zak) : Xo+z,' Z + ZDocument5 pagesTR (Zak) : Xo+z,' Z + ZSara WigginsNo ratings yet
- Contributions To The Model Reduction ProblemDocument2 pagesContributions To The Model Reduction ProblemAnonymous fGe1EQAAcNo ratings yet
- CFD Modelling of The Air and Contaminant Distribution in RoomsDocument7 pagesCFD Modelling of The Air and Contaminant Distribution in RoomsDanang JoyoeNo ratings yet
- Tuning Method of PI Controller With Desired Damping Coefficient For A First-Order Lag Plus Deadtime SystemDocument5 pagesTuning Method of PI Controller With Desired Damping Coefficient For A First-Order Lag Plus Deadtime SystemAnonymous WkbmWCa8MNo ratings yet
- Overshoot Free Pi Controller Tuning Based On Pole AssignmentDocument5 pagesOvershoot Free Pi Controller Tuning Based On Pole AssignmentEngr Nayyer Nayyab MalikNo ratings yet
- Robust Linear ParameterDocument6 pagesRobust Linear ParametervinaycltNo ratings yet
- Step ColDocument21 pagesStep ColamachmouchiNo ratings yet
- Articulo Generalizacion ZADyexponenteslyapunovDocument13 pagesArticulo Generalizacion ZADyexponenteslyapunovトーレス ルートヴィヒNo ratings yet
- SPE 16984 PA - PDF Performance Predictions For Gas Condensate ReservoirsDocument9 pagesSPE 16984 PA - PDF Performance Predictions For Gas Condensate Reservoirsswaala4realNo ratings yet
- P.L.D. Peres J.C. Geromel - H2 Control For Discrete-Time Systems Optimality and RobustnessDocument4 pagesP.L.D. Peres J.C. Geromel - H2 Control For Discrete-Time Systems Optimality and RobustnessflausenNo ratings yet
- Transmission Tower Limit Analysis and DesignDocument9 pagesTransmission Tower Limit Analysis and Designjunhe898No ratings yet
- Chap 12Document120 pagesChap 12Phuc LxNo ratings yet
- J Fivez, B de Raedt and H de Raedt - Low-Temperature Phonon Dynamics of A Classical Compressible Heisenberg ChainDocument11 pagesJ Fivez, B de Raedt and H de Raedt - Low-Temperature Phonon Dynamics of A Classical Compressible Heisenberg ChainTellusz4532No ratings yet
- And HZ Robust Design Techniques For Static Prefilters: Alvaro@iie. Edu - Uy - FaxDocument6 pagesAnd HZ Robust Design Techniques For Static Prefilters: Alvaro@iie. Edu - Uy - FaxDya IonutNo ratings yet
- Chapter 8 Regression Analysis - 2009 - A Guide To Microsoft Excel 2007 For Scientists and EngineersDocument18 pagesChapter 8 Regression Analysis - 2009 - A Guide To Microsoft Excel 2007 For Scientists and EngineersyonayeNo ratings yet
- Basic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. OyarzúnDocument15 pagesBasic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. Oyarzúnñ=?!2No ratings yet
- $riyaz Split 1 PDFDocument113 pages$riyaz Split 1 PDFratchagarajaNo ratings yet
- 32 CongressDocument18 pages32 CongressSidney LinsNo ratings yet
- Testing Loop Quantum CosmologyDocument20 pagesTesting Loop Quantum CosmologyforizslNo ratings yet
- 4568 PaperDocument22 pages4568 Paperfernando aguilarNo ratings yet
- P Adic DynamicsDocument21 pagesP Adic DynamicsdmtriNo ratings yet
- Colebrook EquationDocument7 pagesColebrook EquationAhmed AwadallaNo ratings yet
- The Methodof Lagrange MultipliersDocument116 pagesThe Methodof Lagrange MultipliersShiko SaibaNo ratings yet
- BPMPD ManualDocument30 pagesBPMPD ManualMarcelo DávalosNo ratings yet
- Output Feedback Controllers For Systems With Structured UncertaintyDocument5 pagesOutput Feedback Controllers For Systems With Structured UncertaintyBikshan GhoshNo ratings yet
- Local Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXDocument9 pagesLocal Search in Smooth Convex Sets: CX Ax B A I A A A A A A O D X Ax B X CX CX O A I J Z O Opt D X X C A B P CXhellothapliyalNo ratings yet
- Topic Summary - Modules 1 To 3Document4 pagesTopic Summary - Modules 1 To 3r8jrmfhxmnNo ratings yet
- Florian Diedrich Et Al - Approximation Algorithms For 3D Orthogonal KnapsackDocument12 pagesFlorian Diedrich Et Al - Approximation Algorithms For 3D Orthogonal KnapsackMnaomNo ratings yet
- CH 6Document12 pagesCH 6aprilswapnilNo ratings yet
- FTP PDFDocument1 pageFTP PDFhariNo ratings yet
- Optimal Scheduling of A Two-Stage Hybrid Flow Shop: OriginalarticleDocument18 pagesOptimal Scheduling of A Two-Stage Hybrid Flow Shop: OriginalarticleOlivia brianneNo ratings yet
- A Fully Locking Free Isogeometric Approach For Plane Linear Elasticity Problems A Stream Function FormulationDocument13 pagesA Fully Locking Free Isogeometric Approach For Plane Linear Elasticity Problems A Stream Function FormulationMojtaba MohebiniaNo ratings yet
- Kronecker ProductDocument10 pagesKronecker ProductIgnacio MolinaNo ratings yet
- Long-Term Prediction of Time Series Using State-Space ModelsDocument11 pagesLong-Term Prediction of Time Series Using State-Space ModelsMurilo CamargosNo ratings yet
- Underactuated Mechanical SystemsDocument16 pagesUnderactuated Mechanical SystemsVictor PassosNo ratings yet
- Matrix Structures For Image Applications: Some Examples and Open ProblemsDocument8 pagesMatrix Structures For Image Applications: Some Examples and Open Problemspankaj sethiaNo ratings yet
- MPC Integral ActionDocument11 pagesMPC Integral ActionLionelNo ratings yet
- Mathcad Exercise2Document3 pagesMathcad Exercise2Viola HippieNo ratings yet
- Computational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)From EverandComputational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)No ratings yet
- Data Sheet 29-9 - Fig TC704 (900) Conical (Witches Hat) StrainerDocument1 pageData Sheet 29-9 - Fig TC704 (900) Conical (Witches Hat) StrainerSteve NewmanNo ratings yet
- CSC 472Document150 pagesCSC 472syedmaveedNo ratings yet
- Cycling Worksheets PDFDocument4 pagesCycling Worksheets PDFWilker JordanNo ratings yet
- Shrinkage Compensating Concrete Floors: Thessen Concrete Contracting, IncDocument21 pagesShrinkage Compensating Concrete Floors: Thessen Concrete Contracting, Incgava_1307No ratings yet
- Ripex App SNMP enDocument64 pagesRipex App SNMP enhadiNo ratings yet
- Pakistan International School (English Section) : Subject: Physics Grade: 7 Answer Key Chapter 31: CircuitsDocument2 pagesPakistan International School (English Section) : Subject: Physics Grade: 7 Answer Key Chapter 31: CircuitsAHK GAMERNo ratings yet
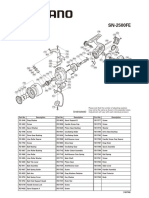
- 16SN2500FEDocument1 page16SN2500FEGergely IvánovicsNo ratings yet
- Keys To Mimic Mouse On My Mac - Google SearchDocument2 pagesKeys To Mimic Mouse On My Mac - Google SearchJalaludin SikanderNo ratings yet
- NoteDocument264 pagesNoteBelayneh TadesseNo ratings yet
- LK-1910, LK-1920, LK-1930 emDocument187 pagesLK-1910, LK-1920, LK-1930 emAmila LasanthaNo ratings yet
- Topa0155 ManualDocument70 pagesTopa0155 Manualmohamed sidkyNo ratings yet
- Ascotran: Flash-Rust / In-Can ProtectionDocument6 pagesAscotran: Flash-Rust / In-Can ProtectiondiablomatiNo ratings yet
- Adanga PP Daily Production Report 7th March 2021Document10 pagesAdanga PP Daily Production Report 7th March 2021emmanuel francizNo ratings yet
- Aci 201 Guide To Durable ConcreteDocument17 pagesAci 201 Guide To Durable ConcreteRoxana GabrielaNo ratings yet
- 39thv RGVDocument109 pages39thv RGVRajeshYadavNo ratings yet
- Professor Ali Nadjai - Characterisation of Travelling Fires in Large CompartmentsDocument42 pagesProfessor Ali Nadjai - Characterisation of Travelling Fires in Large CompartmentsDavid O'ConnorNo ratings yet
- Wfms Scsprover WebDocument3 pagesWfms Scsprover WebBayu SaputraNo ratings yet
- OsiSense XC - XCKJ161Document8 pagesOsiSense XC - XCKJ161Dicky EkaNo ratings yet
- HM Inter Prediction 111022 r3Document52 pagesHM Inter Prediction 111022 r3Lộc Đoàn Văn LộcNo ratings yet
- SCADA PresentationDocument6 pagesSCADA PresentationGigih PramonoNo ratings yet
- Qcadesigner SimuDocument20 pagesQcadesigner SimuSupravatAppaNo ratings yet
- Makalah GTWDocument8 pagesMakalah GTWfaisalNo ratings yet
- Methods of Chemical Analysis of Ferro Alloys. Indian Standard 1962Document73 pagesMethods of Chemical Analysis of Ferro Alloys. Indian Standard 1962Fernando BalseiroNo ratings yet
- Market Survey - PetrofacDocument4 pagesMarket Survey - PetrofacNaeem DeenNo ratings yet
- Minister Hi-Tech Park & Myone Electronics LTD: Corporate Price ListDocument4 pagesMinister Hi-Tech Park & Myone Electronics LTD: Corporate Price ListSohel MridhaNo ratings yet
- Q3 Summative Test No. 4 Science 6Document4 pagesQ3 Summative Test No. 4 Science 6patrick henry paltep100% (1)
- Dorman Long Bridge's Book (1930)Document32 pagesDorman Long Bridge's Book (1930)JimmyNo ratings yet
- Manual Utilizare Sistem Garaj - SPIDODocument78 pagesManual Utilizare Sistem Garaj - SPIDOTheodora GherdanNo ratings yet
- Solenoid Operated Directional Valves CatalogDocument32 pagesSolenoid Operated Directional Valves CatalogMohamed RashedNo ratings yet