
INC 341 Feedback Control Systems 30 พ.ย.2558 PDF
INC 341 Feedback Control Systems 30 พ.ย.2558 PDF
You might also like
- Ninja 250 ManualDocument248 pagesNinja 250 ManualGrowler BearNo ratings yet
- Gyro CompassDocument21 pagesGyro CompassRaj Pati Sundi100% (1)
- E-06 Marine Quartz Chronometer SystemDocument60 pagesE-06 Marine Quartz Chronometer Systemcengiz kutukcuNo ratings yet
- ABS System - Bosch 2E ABSDocument14 pagesABS System - Bosch 2E ABSngelectronic5226100% (1)
- Denon Pma-925r, 725rDocument38 pagesDenon Pma-925r, 725rscribesquemas100% (1)
- Manual, Type 80 Koomey UnitDocument52 pagesManual, Type 80 Koomey Unitstevo3009100% (9)
- Sansui-AU-X701-X901 Service ManualDocument23 pagesSansui-AU-X701-X901 Service Manualhifierin100% (1)
- Wifi Digital Microscope User's ManualDocument39 pagesWifi Digital Microscope User's ManualAgus Salim DarmaNo ratings yet
- Kenwood TH-G71A-E Service ManualDocument28 pagesKenwood TH-G71A-E Service ManualΓΙΩΡΓΟΣ ΚΑΚΑΦΛΙΚΑΣNo ratings yet
- Control Panel With Pendulum GaugeDocument18 pagesControl Panel With Pendulum GaugeFlávio DiasNo ratings yet
- Sist. Electrico de Hi-LuxDocument198 pagesSist. Electrico de Hi-Luxhenrrysma100% (19)
- Per-Unit Problems & HW5-SolutionsDocument9 pagesPer-Unit Problems & HW5-SolutionsdennyyusufNo ratings yet
- Yamaha M60 PWR SMDocument12 pagesYamaha M60 PWR SMalain_coNo ratings yet
- Hydraulic DataDocument32 pagesHydraulic Datafahirin100% (1)
- Dgps Navigator Model-Jlr-7700mk IIDocument30 pagesDgps Navigator Model-Jlr-7700mk IINikhil AryaNo ratings yet
- Binder 1Document17 pagesBinder 1Zishan BashirNo ratings yet
- Leader Lbo-510 & 511 Service ManualDocument20 pagesLeader Lbo-510 & 511 Service ManualMiguel-WilfredSusanLim0% (3)
- 400kV CT Type 2, Rev 1Document8 pages400kV CT Type 2, Rev 1S ManoharNo ratings yet
- Apollo Training Stabilzation and Control System Study GuideDocument105 pagesApollo Training Stabilzation and Control System Study GuideBob Andrepont100% (1)
- TXDS939 SMDocument39 pagesTXDS939 SMVisy Technology SystemsNo ratings yet
- Safety Assessment Report For Soyuz Propulsion and Control SyDocument63 pagesSafety Assessment Report For Soyuz Propulsion and Control SyBob AndrepontNo ratings yet
- Midterm II 2013 SolutionDocument6 pagesMidterm II 2013 SolutionKevinNo ratings yet
- Ieee C57.19.01.1991Document11 pagesIeee C57.19.01.1991Mtp Sa de CvNo ratings yet
- 2 Brickham Concept May 67Document3 pages2 Brickham Concept May 67Phoenix Program FilesNo ratings yet
- Aircraft A330 Power PlantDocument55 pagesAircraft A330 Power PlantMUSSA100% (1)
- Energy System in Steady StateDocument53 pagesEnergy System in Steady StateSK PNo ratings yet
- 1 - 1995 - 1 - Fix Pay Seniority GR 16 08 2019Document2 pages1 - 1995 - 1 - Fix Pay Seniority GR 16 08 2019Jaysinh KumpavatNo ratings yet
- Difference Between Microprocessor and MicroprocessorDocument10 pagesDifference Between Microprocessor and Microprocessoree210150900103No ratings yet
- Flow Cylinder VibDocument4 pagesFlow Cylinder Vibashoku2No ratings yet
- Vibration 2013 Midterm TestDocument4 pagesVibration 2013 Midterm TestgulabNo ratings yet
- Phys 2o6 Sol Assign5Document13 pagesPhys 2o6 Sol Assign5a1malik420No ratings yet
- Catalog Spun PileDocument12 pagesCatalog Spun PileYack Boonsong100% (1)
- Manual Cesna0002Document10 pagesManual Cesna0002Carlos Alberto Romero RicoNo ratings yet
- RX-415 ManualDocument32 pagesRX-415 ManualNiraj Singh100% (1)
- 20151112161412 MEE 333 Automatic Control Engineering 21 ก.ย.2558 PDFDocument14 pages20151112161412 MEE 333 Automatic Control Engineering 21 ก.ย.2558 PDFLottae NarusornNo ratings yet
- Tascam TEAC 122MKII Master Cassette Deck (Schematic Diagrams) PDFDocument7 pagesTascam TEAC 122MKII Master Cassette Deck (Schematic Diagrams) PDFOscar GaliciaNo ratings yet
- Panas CT990Document8 pagesPanas CT990gtgfmjhNo ratings yet
- Electrical Engineering Objective Questions Part 2Document15 pagesElectrical Engineering Objective Questions Part 2Hero ArairaNo ratings yet
- Invoice/Factur.E: Sold To - Vendu A Ship To Expedie ADocument13 pagesInvoice/Factur.E: Sold To - Vendu A Ship To Expedie AajknollNo ratings yet
- Yaesu FT-411 Technical Supplement Service ManualDocument34 pagesYaesu FT-411 Technical Supplement Service ManualYayok S. Anggoro100% (1)
- SB 404 Exhaust Valve Inspection (High Lead Fuel Operation) PDFDocument2 pagesSB 404 Exhaust Valve Inspection (High Lead Fuel Operation) PDFElzo FreitasNo ratings yet
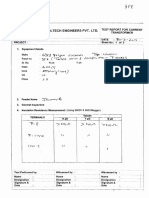
- Volt::Ch: Voltech Engineers Pvt. LTDDocument32 pagesVolt::Ch: Voltech Engineers Pvt. LTDMuruganNo ratings yet
- Clarion ARX5370RDocument18 pagesClarion ARX5370RSeve Hdez SancNo ratings yet
- All Test Bus SystemsDocument37 pagesAll Test Bus SystemsMiguel Acb100% (2)
- Encyclopedia of Electronic Circuits Volume 2Document766 pagesEncyclopedia of Electronic Circuits Volume 2purushottam_gore6235100% (12)
- ECGFactsMadeIncrediblyQuick 1steditionDocument127 pagesECGFactsMadeIncrediblyQuick 1steditionLisandra Damian100% (2)
- PP1127 TrainingManual LoresDocument24 pagesPP1127 TrainingManual LoresAjit KumarNo ratings yet
- Technics Diagram - 345Document8 pagesTechnics Diagram - 345skiaskiaNo ratings yet
- KMK6190Document12 pagesKMK6190Giorgio FerNo ratings yet
- Icom IC229 Service ManualDocument45 pagesIcom IC229 Service ManualRobert/YG2AKR67% (3)
- Yamaha A960 Integrated Amplifier Service ManualDocument37 pagesYamaha A960 Integrated Amplifier Service ManualDarko Goracinski100% (1)
- Flashlight RadioDocument6 pagesFlashlight RadioGorniNo ratings yet
- Motor de Energia Livre - Muammer YildizDocument11 pagesMotor de Energia Livre - Muammer YildizAsh TorresNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- AUTOMATION ANYWHERE ENTERPRISE 11 LTS Bo PDFDocument667 pagesAUTOMATION ANYWHERE ENTERPRISE 11 LTS Bo PDFSiao DaNo ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFSiao DaNo ratings yet
- FDDB PresentDocument25 pagesFDDB PresentSiao DaNo ratings yet
- What Is The Difference Between Modbus, Modbus Plus, and Modbustcp/Ip?Document1 pageWhat Is The Difference Between Modbus, Modbus Plus, and Modbustcp/Ip?Siao DaNo ratings yet
- Typing TutorDocument17 pagesTyping TutorDhananjay Sharma50% (2)
- Flare - On 4: Challenge 9 Solution: Challenge Author: Joshua HomanDocument15 pagesFlare - On 4: Challenge 9 Solution: Challenge Author: Joshua HomanWalid KHNo ratings yet
- Q19STE.L1.4 TYPE OF CircuitDocument19 pagesQ19STE.L1.4 TYPE OF CircuitNicole MancenidoNo ratings yet
- Toshiba Toshiba: Toshiba Toshiba Toshiba Toshiba Toshiba ToshibaDocument10 pagesToshiba Toshiba: Toshiba Toshiba Toshiba Toshiba Toshiba ToshibaEnrique CedeñoNo ratings yet
- Electrical Fundamental 2: Three Phase SystemDocument11 pagesElectrical Fundamental 2: Three Phase SystemredguavaNo ratings yet
- PCB Design Tutorial With Eagle: Schematic". This Will Bring Up The Schematic EditorDocument11 pagesPCB Design Tutorial With Eagle: Schematic". This Will Bring Up The Schematic EditorTunea OctavianNo ratings yet
- Electrochemical EngineeringDocument19 pagesElectrochemical EngineeringMolu VarchaNo ratings yet
- MESF000149B WA Accessories Cat 0216Document20 pagesMESF000149B WA Accessories Cat 0216Krista TranNo ratings yet
- Control System Engineering LABs ManualDocument39 pagesControl System Engineering LABs ManualAbrash Khan Sikandri100% (1)
- V3215 WS2H and WS3 Programming and WiringDocument64 pagesV3215 WS2H and WS3 Programming and WiringFranco YnquillaNo ratings yet
- Cable Modem Samsung SCM-120UDocument67 pagesCable Modem Samsung SCM-120UregistersNo ratings yet
- TRM 104Document2 pagesTRM 104Dennis RimandoNo ratings yet
- High Performance Digital Gas Mass Flow Meters & Controllers: N N N N NDocument8 pagesHigh Performance Digital Gas Mass Flow Meters & Controllers: N N N N NJose GoNo ratings yet
- Maxon A Ha NiseriesDocument4 pagesMaxon A Ha Niseriescrown1973No ratings yet
- Electric Current The Flow of ChargeDocument6 pagesElectric Current The Flow of ChargePournima AmbikarNo ratings yet
- Micro V 4201-242aDocument85 pagesMicro V 4201-242aEduardo HuaytaNo ratings yet
- Cts CommandsDocument88 pagesCts CommandsDurgaPrasad100% (1)
- AutomationDocument598 pagesAutomationMELVINNo ratings yet
- CUP IBChemistry c03 It BondingDocument59 pagesCUP IBChemistry c03 It BondingAdnan ChowdhuryNo ratings yet
- EktaproP ComDocument41 pagesEktaproP ComSamy GuitarsNo ratings yet
- Compteur Electronique Lc4h-Psvr6-Ac240vsDocument10 pagesCompteur Electronique Lc4h-Psvr6-Ac240vsamalalaouNo ratings yet
- Aegps Protect 8 enDocument8 pagesAegps Protect 8 enJose EspinozaNo ratings yet
- Privileg PFV 90 W A+ 58573429Document1 pagePrivileg PFV 90 W A+ 58573429arpcproNo ratings yet
- High Electron Mobility Transistor (Hemt)Document4 pagesHigh Electron Mobility Transistor (Hemt)ijsretNo ratings yet
- Advanced SensorsDocument23 pagesAdvanced SensorsAzharuddin Mansoori100% (1)
- SIRADEL MMW Propagation 2Document11 pagesSIRADEL MMW Propagation 2Prabhakar SinghNo ratings yet
- Electronic TransmitterDocument3 pagesElectronic TransmittersdfsfgNo ratings yet
- Keithley Model 2000 Multimeter Repair ManualDocument109 pagesKeithley Model 2000 Multimeter Repair Manualwolfovic3932No ratings yet























































































Download as pdf or txt
You might also like
- Ninja 250 ManualDocument248 pagesNinja 250 ManualGrowler BearNo ratings yet
- Gyro CompassDocument21 pagesGyro CompassRaj Pati Sundi100% (1)
- E-06 Marine Quartz Chronometer SystemDocument60 pagesE-06 Marine Quartz Chronometer Systemcengiz kutukcuNo ratings yet
- ABS System - Bosch 2E ABSDocument14 pagesABS System - Bosch 2E ABSngelectronic5226100% (1)
- Denon Pma-925r, 725rDocument38 pagesDenon Pma-925r, 725rscribesquemas100% (1)
- Manual, Type 80 Koomey UnitDocument52 pagesManual, Type 80 Koomey Unitstevo3009100% (9)
- Sansui-AU-X701-X901 Service ManualDocument23 pagesSansui-AU-X701-X901 Service Manualhifierin100% (1)
- Wifi Digital Microscope User's ManualDocument39 pagesWifi Digital Microscope User's ManualAgus Salim DarmaNo ratings yet
- Kenwood TH-G71A-E Service ManualDocument28 pagesKenwood TH-G71A-E Service ManualΓΙΩΡΓΟΣ ΚΑΚΑΦΛΙΚΑΣNo ratings yet
- Control Panel With Pendulum GaugeDocument18 pagesControl Panel With Pendulum GaugeFlávio DiasNo ratings yet
- Sist. Electrico de Hi-LuxDocument198 pagesSist. Electrico de Hi-Luxhenrrysma100% (19)
- Per-Unit Problems & HW5-SolutionsDocument9 pagesPer-Unit Problems & HW5-SolutionsdennyyusufNo ratings yet
- Yamaha M60 PWR SMDocument12 pagesYamaha M60 PWR SMalain_coNo ratings yet
- Hydraulic DataDocument32 pagesHydraulic Datafahirin100% (1)
- Dgps Navigator Model-Jlr-7700mk IIDocument30 pagesDgps Navigator Model-Jlr-7700mk IINikhil AryaNo ratings yet
- Binder 1Document17 pagesBinder 1Zishan BashirNo ratings yet
- Leader Lbo-510 & 511 Service ManualDocument20 pagesLeader Lbo-510 & 511 Service ManualMiguel-WilfredSusanLim0% (3)
- 400kV CT Type 2, Rev 1Document8 pages400kV CT Type 2, Rev 1S ManoharNo ratings yet
- Apollo Training Stabilzation and Control System Study GuideDocument105 pagesApollo Training Stabilzation and Control System Study GuideBob Andrepont100% (1)
- TXDS939 SMDocument39 pagesTXDS939 SMVisy Technology SystemsNo ratings yet
- Safety Assessment Report For Soyuz Propulsion and Control SyDocument63 pagesSafety Assessment Report For Soyuz Propulsion and Control SyBob AndrepontNo ratings yet
- Midterm II 2013 SolutionDocument6 pagesMidterm II 2013 SolutionKevinNo ratings yet
- Ieee C57.19.01.1991Document11 pagesIeee C57.19.01.1991Mtp Sa de CvNo ratings yet
- 2 Brickham Concept May 67Document3 pages2 Brickham Concept May 67Phoenix Program FilesNo ratings yet
- Aircraft A330 Power PlantDocument55 pagesAircraft A330 Power PlantMUSSA100% (1)
- Energy System in Steady StateDocument53 pagesEnergy System in Steady StateSK PNo ratings yet
- 1 - 1995 - 1 - Fix Pay Seniority GR 16 08 2019Document2 pages1 - 1995 - 1 - Fix Pay Seniority GR 16 08 2019Jaysinh KumpavatNo ratings yet
- Difference Between Microprocessor and MicroprocessorDocument10 pagesDifference Between Microprocessor and Microprocessoree210150900103No ratings yet
- Flow Cylinder VibDocument4 pagesFlow Cylinder Vibashoku2No ratings yet
- Vibration 2013 Midterm TestDocument4 pagesVibration 2013 Midterm TestgulabNo ratings yet
- Phys 2o6 Sol Assign5Document13 pagesPhys 2o6 Sol Assign5a1malik420No ratings yet
- Catalog Spun PileDocument12 pagesCatalog Spun PileYack Boonsong100% (1)
- Manual Cesna0002Document10 pagesManual Cesna0002Carlos Alberto Romero RicoNo ratings yet
- RX-415 ManualDocument32 pagesRX-415 ManualNiraj Singh100% (1)
- 20151112161412 MEE 333 Automatic Control Engineering 21 ก.ย.2558 PDFDocument14 pages20151112161412 MEE 333 Automatic Control Engineering 21 ก.ย.2558 PDFLottae NarusornNo ratings yet
- Tascam TEAC 122MKII Master Cassette Deck (Schematic Diagrams) PDFDocument7 pagesTascam TEAC 122MKII Master Cassette Deck (Schematic Diagrams) PDFOscar GaliciaNo ratings yet
- Panas CT990Document8 pagesPanas CT990gtgfmjhNo ratings yet
- Electrical Engineering Objective Questions Part 2Document15 pagesElectrical Engineering Objective Questions Part 2Hero ArairaNo ratings yet
- Invoice/Factur.E: Sold To - Vendu A Ship To Expedie ADocument13 pagesInvoice/Factur.E: Sold To - Vendu A Ship To Expedie AajknollNo ratings yet
- Yaesu FT-411 Technical Supplement Service ManualDocument34 pagesYaesu FT-411 Technical Supplement Service ManualYayok S. Anggoro100% (1)
- SB 404 Exhaust Valve Inspection (High Lead Fuel Operation) PDFDocument2 pagesSB 404 Exhaust Valve Inspection (High Lead Fuel Operation) PDFElzo FreitasNo ratings yet
- Volt::Ch: Voltech Engineers Pvt. LTDDocument32 pagesVolt::Ch: Voltech Engineers Pvt. LTDMuruganNo ratings yet
- Clarion ARX5370RDocument18 pagesClarion ARX5370RSeve Hdez SancNo ratings yet
- All Test Bus SystemsDocument37 pagesAll Test Bus SystemsMiguel Acb100% (2)
- Encyclopedia of Electronic Circuits Volume 2Document766 pagesEncyclopedia of Electronic Circuits Volume 2purushottam_gore6235100% (12)
- ECGFactsMadeIncrediblyQuick 1steditionDocument127 pagesECGFactsMadeIncrediblyQuick 1steditionLisandra Damian100% (2)
- PP1127 TrainingManual LoresDocument24 pagesPP1127 TrainingManual LoresAjit KumarNo ratings yet
- Technics Diagram - 345Document8 pagesTechnics Diagram - 345skiaskiaNo ratings yet
- KMK6190Document12 pagesKMK6190Giorgio FerNo ratings yet
- Icom IC229 Service ManualDocument45 pagesIcom IC229 Service ManualRobert/YG2AKR67% (3)
- Yamaha A960 Integrated Amplifier Service ManualDocument37 pagesYamaha A960 Integrated Amplifier Service ManualDarko Goracinski100% (1)
- Flashlight RadioDocument6 pagesFlashlight RadioGorniNo ratings yet
- Motor de Energia Livre - Muammer YildizDocument11 pagesMotor de Energia Livre - Muammer YildizAsh TorresNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- AUTOMATION ANYWHERE ENTERPRISE 11 LTS Bo PDFDocument667 pagesAUTOMATION ANYWHERE ENTERPRISE 11 LTS Bo PDFSiao DaNo ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFSiao DaNo ratings yet
- FDDB PresentDocument25 pagesFDDB PresentSiao DaNo ratings yet
- What Is The Difference Between Modbus, Modbus Plus, and Modbustcp/Ip?Document1 pageWhat Is The Difference Between Modbus, Modbus Plus, and Modbustcp/Ip?Siao DaNo ratings yet
- Typing TutorDocument17 pagesTyping TutorDhananjay Sharma50% (2)
- Flare - On 4: Challenge 9 Solution: Challenge Author: Joshua HomanDocument15 pagesFlare - On 4: Challenge 9 Solution: Challenge Author: Joshua HomanWalid KHNo ratings yet
- Q19STE.L1.4 TYPE OF CircuitDocument19 pagesQ19STE.L1.4 TYPE OF CircuitNicole MancenidoNo ratings yet
- Toshiba Toshiba: Toshiba Toshiba Toshiba Toshiba Toshiba ToshibaDocument10 pagesToshiba Toshiba: Toshiba Toshiba Toshiba Toshiba Toshiba ToshibaEnrique CedeñoNo ratings yet
- Electrical Fundamental 2: Three Phase SystemDocument11 pagesElectrical Fundamental 2: Three Phase SystemredguavaNo ratings yet
- PCB Design Tutorial With Eagle: Schematic". This Will Bring Up The Schematic EditorDocument11 pagesPCB Design Tutorial With Eagle: Schematic". This Will Bring Up The Schematic EditorTunea OctavianNo ratings yet
- Electrochemical EngineeringDocument19 pagesElectrochemical EngineeringMolu VarchaNo ratings yet
- MESF000149B WA Accessories Cat 0216Document20 pagesMESF000149B WA Accessories Cat 0216Krista TranNo ratings yet
- Control System Engineering LABs ManualDocument39 pagesControl System Engineering LABs ManualAbrash Khan Sikandri100% (1)
- V3215 WS2H and WS3 Programming and WiringDocument64 pagesV3215 WS2H and WS3 Programming and WiringFranco YnquillaNo ratings yet
- Cable Modem Samsung SCM-120UDocument67 pagesCable Modem Samsung SCM-120UregistersNo ratings yet
- TRM 104Document2 pagesTRM 104Dennis RimandoNo ratings yet
- High Performance Digital Gas Mass Flow Meters & Controllers: N N N N NDocument8 pagesHigh Performance Digital Gas Mass Flow Meters & Controllers: N N N N NJose GoNo ratings yet
- Maxon A Ha NiseriesDocument4 pagesMaxon A Ha Niseriescrown1973No ratings yet
- Electric Current The Flow of ChargeDocument6 pagesElectric Current The Flow of ChargePournima AmbikarNo ratings yet
- Micro V 4201-242aDocument85 pagesMicro V 4201-242aEduardo HuaytaNo ratings yet
- Cts CommandsDocument88 pagesCts CommandsDurgaPrasad100% (1)
- AutomationDocument598 pagesAutomationMELVINNo ratings yet
- CUP IBChemistry c03 It BondingDocument59 pagesCUP IBChemistry c03 It BondingAdnan ChowdhuryNo ratings yet
- EktaproP ComDocument41 pagesEktaproP ComSamy GuitarsNo ratings yet
- Compteur Electronique Lc4h-Psvr6-Ac240vsDocument10 pagesCompteur Electronique Lc4h-Psvr6-Ac240vsamalalaouNo ratings yet
- Aegps Protect 8 enDocument8 pagesAegps Protect 8 enJose EspinozaNo ratings yet
- Privileg PFV 90 W A+ 58573429Document1 pagePrivileg PFV 90 W A+ 58573429arpcproNo ratings yet
- High Electron Mobility Transistor (Hemt)Document4 pagesHigh Electron Mobility Transistor (Hemt)ijsretNo ratings yet
- Advanced SensorsDocument23 pagesAdvanced SensorsAzharuddin Mansoori100% (1)
- SIRADEL MMW Propagation 2Document11 pagesSIRADEL MMW Propagation 2Prabhakar SinghNo ratings yet
- Electronic TransmitterDocument3 pagesElectronic TransmittersdfsfgNo ratings yet
- Keithley Model 2000 Multimeter Repair ManualDocument109 pagesKeithley Model 2000 Multimeter Repair Manualwolfovic3932No ratings yet