
CNCmakers-EP100 B QuickGuide-EN PDF
CNCmakers-EP100 B QuickGuide-EN PDF
You might also like
- Cutler Hammer. SV9000 AF Drives - Application ManualDocument60 pagesCutler Hammer. SV9000 AF Drives - Application ManualmamasitaricaNo ratings yet
- AWWA-AWWA Standard C530-12 Pilot Operated Control Valves-American Water Works Association (2012)Document32 pagesAWWA-AWWA Standard C530-12 Pilot Operated Control Valves-American Water Works Association (2012)virtech100% (1)
- US200 EnglishDocument28 pagesUS200 EnglishMoogii MonhNo ratings yet
- Servo Motor MR-EDocument310 pagesServo Motor MR-EAlberto Suazo BasaezNo ratings yet
- A WC 708 Lite User ManualDocument12 pagesA WC 708 Lite User ManualFernando ZaiaNo ratings yet
- T B S G I M: IE AR Train AGE Nstruction AnualDocument22 pagesT B S G I M: IE AR Train AGE Nstruction Anualgilbert_28No ratings yet
- Service Manual - Samsung Gbpxxsen CH Le23r86bd Le26r86bd Le32r86bd Le37r86bd Le40r86bdDocument140 pagesService Manual - Samsung Gbpxxsen CH Le23r86bd Le26r86bd Le32r86bd Le37r86bd Le40r86bdbpkul50% (2)
- TV Sony Kv-pg14l70Document43 pagesTV Sony Kv-pg14l70Emilio Pinato100% (3)
- GP10 Start-Up GuideDocument11 pagesGP10 Start-Up GuideJuan I. Meza LozanoNo ratings yet
- Gu320a PDFDocument4 pagesGu320a PDFbambangNo ratings yet
- PRONET User Manual V1Document88 pagesPRONET User Manual V1Tülay Mutlu100% (1)
- How To Test A Motherboard Thru Their VRMsDocument5 pagesHow To Test A Motherboard Thru Their VRMsRAGANo ratings yet
- J4 Alarm ListDocument174 pagesJ4 Alarm ListElvira Nisa SNo ratings yet
- Delta DPA CatalogDocument7 pagesDelta DPA CatalogElectromateNo ratings yet
- 350im English (Revised2) - 1Document280 pages350im English (Revised2) - 1Wilson100% (1)
- Encoder S Short FormDocument2 pagesEncoder S Short FormelecompinnNo ratings yet
- Int69 Vsy-Ii Protection ModuleDocument1 pageInt69 Vsy-Ii Protection Moduleamir12345678No ratings yet
- Ep100 ManualDocument20 pagesEp100 Manualhang100% (1)
- Digital Weighing Indicator: Operating ManualDocument74 pagesDigital Weighing Indicator: Operating ManualThemaster withinNo ratings yet
- Stepper Driver Spec. of FMDD50D40NOM (FUYU)Document5 pagesStepper Driver Spec. of FMDD50D40NOM (FUYU)Ronald SalloNo ratings yet
- Delta ASDA B2 User ManualDocument337 pagesDelta ASDA B2 User ManualSeyhmus YklNo ratings yet
- 915Document9 pages915Jorge CotzomiNo ratings yet
- JHD629 204aDocument22 pagesJHD629 204apiyushpandeyNo ratings yet
- 20110503104950628Document1 page20110503104950628Nguyễn Khoa100% (1)
- BTS412BDocument14 pagesBTS412Bstodzathegreat100% (1)
- Variador Sumitomo PDFDocument8 pagesVariador Sumitomo PDFGera Ortiz MartinezNo ratings yet
- Eacon Inv Ec500Document74 pagesEacon Inv Ec500michalis zisisNo ratings yet
- Delta VFD-B ManualDocument239 pagesDelta VFD-B ManualRay Rosales100% (2)
- Grid-Tied PV String Inverter: User ManualDocument52 pagesGrid-Tied PV String Inverter: User ManualBanjo MirandillaNo ratings yet
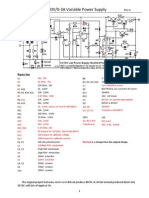
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Document2 pagesModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraNo ratings yet
- CD4019Document4 pagesCD4019scooby_maximoNo ratings yet
- V Series Temperature Controllers User's Manual: (21) Specifications (22) WiringDocument4 pagesV Series Temperature Controllers User's Manual: (21) Specifications (22) WiringluisNo ratings yet
- Inovance-IS300 Series Servo Drive User Manual V1.0Document100 pagesInovance-IS300 Series Servo Drive User Manual V1.0Shirley CastañedaNo ratings yet
- Owner's Manual (KJR 08)Document4 pagesOwner's Manual (KJR 08)Catalino Peralta Segovia100% (1)
- 3VT4 Molded Case PDFDocument17 pages3VT4 Molded Case PDFAnonymous clMeE4g70No ratings yet
- Samsung Bn44-00473a Pslf121a03s Smps Ue40d5003Document6 pagesSamsung Bn44-00473a Pslf121a03s Smps Ue40d5003Baharudin BharNo ratings yet
- Uipet-03 Manual 1Document6 pagesUipet-03 Manual 1Mohd SharimNo ratings yet
- Usb Mp3 Player Connection DiagramDocument12 pagesUsb Mp3 Player Connection DiagramAnil Kumar100% (1)
- DS2 Series 220V Servo DriverDocument59 pagesDS2 Series 220V Servo Driverspectra-tw100% (1)
- LG VFDDocument38 pagesLG VFDDenuj jouNo ratings yet
- Motor de Passo A16K-G268Document3 pagesMotor de Passo A16K-G268Edson DinizNo ratings yet
- Sony KDL 42W800A42W801A42W807A47W800A47W801A47W807A55W800A55W801A55W807A L3Document34 pagesSony KDL 42W800A42W801A42W807A47W800A47W801A47W807A55W800A55W801A55W807A L3pasantito100% (1)
- Dell - Xps - l501x - l502x - DAGM6BMB8F0 Quanta - gm6b - Rev - 1a - SCH PDFDocument56 pagesDell - Xps - l501x - l502x - DAGM6BMB8F0 Quanta - gm6b - Rev - 1a - SCH PDFDevender kumar100% (1)
- Trooper 3000 Series Process IndicatorDocument2 pagesTrooper 3000 Series Process Indicatorwramadhani65No ratings yet
- UNIX-1 PLC - Compact: FeaturesDocument2 pagesUNIX-1 PLC - Compact: FeaturesRonak Patel100% (1)
- Simphoenix E280 Vector Control - Universal Inverter Series CatalogueDocument12 pagesSimphoenix E280 Vector Control - Universal Inverter Series CatalogueMahmoud Khattab100% (1)
- KAC-8105D/8105DM: Service ManualDocument18 pagesKAC-8105D/8105DM: Service ManualClaudis ReyesNo ratings yet
- Schematic Multi-Input Module WM8805Document3 pagesSchematic Multi-Input Module WM8805aleksa64No ratings yet
- Altec: TC818 Tension Controller Instruction Manual (V4.00)Document42 pagesAltec: TC818 Tension Controller Instruction Manual (V4.00)Rezky YudesilkyNo ratings yet
- ATV61 Quick Reference GuideDocument2 pagesATV61 Quick Reference GuideEduardo PascualNo ratings yet
- Altivar 71 Quick Reference Guide - en - T8843pd0601ep r0Document2 pagesAltivar 71 Quick Reference Guide - en - T8843pd0601ep r0محمد دانشNo ratings yet
- Altivar 71 Quick Reference GuideDocument2 pagesAltivar 71 Quick Reference Guidem_shakshokiNo ratings yet
- Benshaw Softstart MX2 Quickstart Reference Sheet PDFDocument2 pagesBenshaw Softstart MX2 Quickstart Reference Sheet PDFCesar RodriguezNo ratings yet
- Benshaw Motor StarterDocument228 pagesBenshaw Motor Starterhennry_8307No ratings yet
- HY-TB3DV-N 3 Axis Driver Board Manual PDFDocument12 pagesHY-TB3DV-N 3 Axis Driver Board Manual PDFjoelgcrNo ratings yet
- Dse5510 Installation InstDocument2 pagesDse5510 Installation Instricardo_dionisi2700No ratings yet
- JM at - 20040129Document11 pagesJM at - 20040129wreckedweaselNo ratings yet
- Ac Servo TstaDocument6 pagesAc Servo TstaCA PedroNo ratings yet
- GU320A Controller IntroductionDocument4 pagesGU320A Controller IntroductionBradNo ratings yet
- Maxthermo Pid ControllersDocument24 pagesMaxthermo Pid ControllersmoncieldonNo ratings yet
- TM Control ModuleDocument18 pagesTM Control Modulesolikhinnasi2No ratings yet
- Chapter 1Document43 pagesChapter 1Nour Aira NaoNo ratings yet
- 13IPST068 Fabian PerezDocument7 pages13IPST068 Fabian Perezquisi123No ratings yet
- BSR455 - Group 9 - Building Inspection - 3aDocument22 pagesBSR455 - Group 9 - Building Inspection - 3aMuhammad IdzhamNo ratings yet
- UNIT-4 Key Distribution & ManagementDocument53 pagesUNIT-4 Key Distribution & ManagementBharath Kumar T VNo ratings yet
- 4 P's of RolexDocument27 pages4 P's of RolexDaniel Carroll50% (10)
- Kraftwerks K Series Race Supercharger Kit (C38) K Series PartsDocument1 pageKraftwerks K Series Race Supercharger Kit (C38) K Series PartsAndres GigenaNo ratings yet
- 3 Phase Full Wave Bridge ConverterDocument4 pages3 Phase Full Wave Bridge Convertersubhasishpodder100% (1)
- Chapter 6 Financial AssetsDocument6 pagesChapter 6 Financial AssetsJoyce Mae D. FloresNo ratings yet
- Writing Research Papers James D Lester PDFDocument4 pagesWriting Research Papers James D Lester PDFgahebak1mez2100% (1)
- Honda City Vs Toyota CorollaDocument1 pageHonda City Vs Toyota CorollaMuhammad Sheharyar MohsinNo ratings yet
- TIFDDocument1 pageTIFDAtulNo ratings yet
- Ethio Lense CollegeDocument9 pagesEthio Lense CollegeAster AbrahaNo ratings yet
- Loksabha AccomodationDocument2 pagesLoksabha Accomodationabdul956No ratings yet
- 16 Karlekar Purva DTSP Assi 3Document14 pages16 Karlekar Purva DTSP Assi 3Purva100% (1)
- Match The Pictures To The Insurance Claims. Then, Write Your Own Story of An AccidentDocument1 pageMatch The Pictures To The Insurance Claims. Then, Write Your Own Story of An AccidentEvaNo ratings yet
- DM Unit-IvDocument134 pagesDM Unit-IvDwaarakesh RameshNo ratings yet
- Rural Development: 14.1. Rural Scenario in Tamil NaduDocument17 pagesRural Development: 14.1. Rural Scenario in Tamil NaduhinduNo ratings yet
- Social Media Changed The Nature of Indian Education SystemDocument9 pagesSocial Media Changed The Nature of Indian Education SystemHiteshNo ratings yet
- Department of Applied Physics Applied Physics Question Bank Session - 2012-13Document4 pagesDepartment of Applied Physics Applied Physics Question Bank Session - 2012-13Sajid Ur RehmanNo ratings yet
- SOAP Notes: HistoryDocument5 pagesSOAP Notes: HistoryRajveerNo ratings yet
- Quantitative Data Presentation and AnalysisDocument105 pagesQuantitative Data Presentation and AnalysisAljon Andol OrtegaNo ratings yet
- Varsity KA Class & Exam Routine (Part-01)Document2 pagesVarsity KA Class & Exam Routine (Part-01)Yousuf JamilNo ratings yet
- Comparison of PPVFR and The Indian Patents ActDocument14 pagesComparison of PPVFR and The Indian Patents ActRoshi DesaiNo ratings yet
- IOT Based Waste Monitoring SystemDocument25 pagesIOT Based Waste Monitoring SystemMayur ShimpiNo ratings yet
- Jab Chem Nat 5 Question Banks All ExamsDocument55 pagesJab Chem Nat 5 Question Banks All ExamsHariNo ratings yet
- BMGT 210 Syllabus Spring 2016 PoliciesDocument8 pagesBMGT 210 Syllabus Spring 2016 PoliciesSamantha KoyNo ratings yet
- AnyaZoe ScarDocument8 pagesAnyaZoe ScarEloisa Helena A. AdãoNo ratings yet
- Lock Out-Tag OutDocument40 pagesLock Out-Tag OutMurali DharNo ratings yet
- Drill StringDocument72 pagesDrill StringRebar KakaNo ratings yet
























































































Download as pdf or txt
You might also like
- Cutler Hammer. SV9000 AF Drives - Application ManualDocument60 pagesCutler Hammer. SV9000 AF Drives - Application ManualmamasitaricaNo ratings yet
- AWWA-AWWA Standard C530-12 Pilot Operated Control Valves-American Water Works Association (2012)Document32 pagesAWWA-AWWA Standard C530-12 Pilot Operated Control Valves-American Water Works Association (2012)virtech100% (1)
- US200 EnglishDocument28 pagesUS200 EnglishMoogii MonhNo ratings yet
- Servo Motor MR-EDocument310 pagesServo Motor MR-EAlberto Suazo BasaezNo ratings yet
- A WC 708 Lite User ManualDocument12 pagesA WC 708 Lite User ManualFernando ZaiaNo ratings yet
- T B S G I M: IE AR Train AGE Nstruction AnualDocument22 pagesT B S G I M: IE AR Train AGE Nstruction Anualgilbert_28No ratings yet
- Service Manual - Samsung Gbpxxsen CH Le23r86bd Le26r86bd Le32r86bd Le37r86bd Le40r86bdDocument140 pagesService Manual - Samsung Gbpxxsen CH Le23r86bd Le26r86bd Le32r86bd Le37r86bd Le40r86bdbpkul50% (2)
- TV Sony Kv-pg14l70Document43 pagesTV Sony Kv-pg14l70Emilio Pinato100% (3)
- GP10 Start-Up GuideDocument11 pagesGP10 Start-Up GuideJuan I. Meza LozanoNo ratings yet
- Gu320a PDFDocument4 pagesGu320a PDFbambangNo ratings yet
- PRONET User Manual V1Document88 pagesPRONET User Manual V1Tülay Mutlu100% (1)
- How To Test A Motherboard Thru Their VRMsDocument5 pagesHow To Test A Motherboard Thru Their VRMsRAGANo ratings yet
- J4 Alarm ListDocument174 pagesJ4 Alarm ListElvira Nisa SNo ratings yet
- Delta DPA CatalogDocument7 pagesDelta DPA CatalogElectromateNo ratings yet
- 350im English (Revised2) - 1Document280 pages350im English (Revised2) - 1Wilson100% (1)
- Encoder S Short FormDocument2 pagesEncoder S Short FormelecompinnNo ratings yet
- Int69 Vsy-Ii Protection ModuleDocument1 pageInt69 Vsy-Ii Protection Moduleamir12345678No ratings yet
- Ep100 ManualDocument20 pagesEp100 Manualhang100% (1)
- Digital Weighing Indicator: Operating ManualDocument74 pagesDigital Weighing Indicator: Operating ManualThemaster withinNo ratings yet
- Stepper Driver Spec. of FMDD50D40NOM (FUYU)Document5 pagesStepper Driver Spec. of FMDD50D40NOM (FUYU)Ronald SalloNo ratings yet
- Delta ASDA B2 User ManualDocument337 pagesDelta ASDA B2 User ManualSeyhmus YklNo ratings yet
- 915Document9 pages915Jorge CotzomiNo ratings yet
- JHD629 204aDocument22 pagesJHD629 204apiyushpandeyNo ratings yet
- 20110503104950628Document1 page20110503104950628Nguyễn Khoa100% (1)
- BTS412BDocument14 pagesBTS412Bstodzathegreat100% (1)
- Variador Sumitomo PDFDocument8 pagesVariador Sumitomo PDFGera Ortiz MartinezNo ratings yet
- Eacon Inv Ec500Document74 pagesEacon Inv Ec500michalis zisisNo ratings yet
- Delta VFD-B ManualDocument239 pagesDelta VFD-B ManualRay Rosales100% (2)
- Grid-Tied PV String Inverter: User ManualDocument52 pagesGrid-Tied PV String Inverter: User ManualBanjo MirandillaNo ratings yet
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Document2 pagesModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraNo ratings yet
- CD4019Document4 pagesCD4019scooby_maximoNo ratings yet
- V Series Temperature Controllers User's Manual: (21) Specifications (22) WiringDocument4 pagesV Series Temperature Controllers User's Manual: (21) Specifications (22) WiringluisNo ratings yet
- Inovance-IS300 Series Servo Drive User Manual V1.0Document100 pagesInovance-IS300 Series Servo Drive User Manual V1.0Shirley CastañedaNo ratings yet
- Owner's Manual (KJR 08)Document4 pagesOwner's Manual (KJR 08)Catalino Peralta Segovia100% (1)
- 3VT4 Molded Case PDFDocument17 pages3VT4 Molded Case PDFAnonymous clMeE4g70No ratings yet
- Samsung Bn44-00473a Pslf121a03s Smps Ue40d5003Document6 pagesSamsung Bn44-00473a Pslf121a03s Smps Ue40d5003Baharudin BharNo ratings yet
- Uipet-03 Manual 1Document6 pagesUipet-03 Manual 1Mohd SharimNo ratings yet
- Usb Mp3 Player Connection DiagramDocument12 pagesUsb Mp3 Player Connection DiagramAnil Kumar100% (1)
- DS2 Series 220V Servo DriverDocument59 pagesDS2 Series 220V Servo Driverspectra-tw100% (1)
- LG VFDDocument38 pagesLG VFDDenuj jouNo ratings yet
- Motor de Passo A16K-G268Document3 pagesMotor de Passo A16K-G268Edson DinizNo ratings yet
- Sony KDL 42W800A42W801A42W807A47W800A47W801A47W807A55W800A55W801A55W807A L3Document34 pagesSony KDL 42W800A42W801A42W807A47W800A47W801A47W807A55W800A55W801A55W807A L3pasantito100% (1)
- Dell - Xps - l501x - l502x - DAGM6BMB8F0 Quanta - gm6b - Rev - 1a - SCH PDFDocument56 pagesDell - Xps - l501x - l502x - DAGM6BMB8F0 Quanta - gm6b - Rev - 1a - SCH PDFDevender kumar100% (1)
- Trooper 3000 Series Process IndicatorDocument2 pagesTrooper 3000 Series Process Indicatorwramadhani65No ratings yet
- UNIX-1 PLC - Compact: FeaturesDocument2 pagesUNIX-1 PLC - Compact: FeaturesRonak Patel100% (1)
- Simphoenix E280 Vector Control - Universal Inverter Series CatalogueDocument12 pagesSimphoenix E280 Vector Control - Universal Inverter Series CatalogueMahmoud Khattab100% (1)
- KAC-8105D/8105DM: Service ManualDocument18 pagesKAC-8105D/8105DM: Service ManualClaudis ReyesNo ratings yet
- Schematic Multi-Input Module WM8805Document3 pagesSchematic Multi-Input Module WM8805aleksa64No ratings yet
- Altec: TC818 Tension Controller Instruction Manual (V4.00)Document42 pagesAltec: TC818 Tension Controller Instruction Manual (V4.00)Rezky YudesilkyNo ratings yet
- ATV61 Quick Reference GuideDocument2 pagesATV61 Quick Reference GuideEduardo PascualNo ratings yet
- Altivar 71 Quick Reference Guide - en - T8843pd0601ep r0Document2 pagesAltivar 71 Quick Reference Guide - en - T8843pd0601ep r0محمد دانشNo ratings yet
- Altivar 71 Quick Reference GuideDocument2 pagesAltivar 71 Quick Reference Guidem_shakshokiNo ratings yet
- Benshaw Softstart MX2 Quickstart Reference Sheet PDFDocument2 pagesBenshaw Softstart MX2 Quickstart Reference Sheet PDFCesar RodriguezNo ratings yet
- Benshaw Motor StarterDocument228 pagesBenshaw Motor Starterhennry_8307No ratings yet
- HY-TB3DV-N 3 Axis Driver Board Manual PDFDocument12 pagesHY-TB3DV-N 3 Axis Driver Board Manual PDFjoelgcrNo ratings yet
- Dse5510 Installation InstDocument2 pagesDse5510 Installation Instricardo_dionisi2700No ratings yet
- JM at - 20040129Document11 pagesJM at - 20040129wreckedweaselNo ratings yet
- Ac Servo TstaDocument6 pagesAc Servo TstaCA PedroNo ratings yet
- GU320A Controller IntroductionDocument4 pagesGU320A Controller IntroductionBradNo ratings yet
- Maxthermo Pid ControllersDocument24 pagesMaxthermo Pid ControllersmoncieldonNo ratings yet
- TM Control ModuleDocument18 pagesTM Control Modulesolikhinnasi2No ratings yet
- Chapter 1Document43 pagesChapter 1Nour Aira NaoNo ratings yet
- 13IPST068 Fabian PerezDocument7 pages13IPST068 Fabian Perezquisi123No ratings yet
- BSR455 - Group 9 - Building Inspection - 3aDocument22 pagesBSR455 - Group 9 - Building Inspection - 3aMuhammad IdzhamNo ratings yet
- UNIT-4 Key Distribution & ManagementDocument53 pagesUNIT-4 Key Distribution & ManagementBharath Kumar T VNo ratings yet
- 4 P's of RolexDocument27 pages4 P's of RolexDaniel Carroll50% (10)
- Kraftwerks K Series Race Supercharger Kit (C38) K Series PartsDocument1 pageKraftwerks K Series Race Supercharger Kit (C38) K Series PartsAndres GigenaNo ratings yet
- 3 Phase Full Wave Bridge ConverterDocument4 pages3 Phase Full Wave Bridge Convertersubhasishpodder100% (1)
- Chapter 6 Financial AssetsDocument6 pagesChapter 6 Financial AssetsJoyce Mae D. FloresNo ratings yet
- Writing Research Papers James D Lester PDFDocument4 pagesWriting Research Papers James D Lester PDFgahebak1mez2100% (1)
- Honda City Vs Toyota CorollaDocument1 pageHonda City Vs Toyota CorollaMuhammad Sheharyar MohsinNo ratings yet
- TIFDDocument1 pageTIFDAtulNo ratings yet
- Ethio Lense CollegeDocument9 pagesEthio Lense CollegeAster AbrahaNo ratings yet
- Loksabha AccomodationDocument2 pagesLoksabha Accomodationabdul956No ratings yet
- 16 Karlekar Purva DTSP Assi 3Document14 pages16 Karlekar Purva DTSP Assi 3Purva100% (1)
- Match The Pictures To The Insurance Claims. Then, Write Your Own Story of An AccidentDocument1 pageMatch The Pictures To The Insurance Claims. Then, Write Your Own Story of An AccidentEvaNo ratings yet
- DM Unit-IvDocument134 pagesDM Unit-IvDwaarakesh RameshNo ratings yet
- Rural Development: 14.1. Rural Scenario in Tamil NaduDocument17 pagesRural Development: 14.1. Rural Scenario in Tamil NaduhinduNo ratings yet
- Social Media Changed The Nature of Indian Education SystemDocument9 pagesSocial Media Changed The Nature of Indian Education SystemHiteshNo ratings yet
- Department of Applied Physics Applied Physics Question Bank Session - 2012-13Document4 pagesDepartment of Applied Physics Applied Physics Question Bank Session - 2012-13Sajid Ur RehmanNo ratings yet
- SOAP Notes: HistoryDocument5 pagesSOAP Notes: HistoryRajveerNo ratings yet
- Quantitative Data Presentation and AnalysisDocument105 pagesQuantitative Data Presentation and AnalysisAljon Andol OrtegaNo ratings yet
- Varsity KA Class & Exam Routine (Part-01)Document2 pagesVarsity KA Class & Exam Routine (Part-01)Yousuf JamilNo ratings yet
- Comparison of PPVFR and The Indian Patents ActDocument14 pagesComparison of PPVFR and The Indian Patents ActRoshi DesaiNo ratings yet
- IOT Based Waste Monitoring SystemDocument25 pagesIOT Based Waste Monitoring SystemMayur ShimpiNo ratings yet
- Jab Chem Nat 5 Question Banks All ExamsDocument55 pagesJab Chem Nat 5 Question Banks All ExamsHariNo ratings yet
- BMGT 210 Syllabus Spring 2016 PoliciesDocument8 pagesBMGT 210 Syllabus Spring 2016 PoliciesSamantha KoyNo ratings yet
- AnyaZoe ScarDocument8 pagesAnyaZoe ScarEloisa Helena A. AdãoNo ratings yet
- Lock Out-Tag OutDocument40 pagesLock Out-Tag OutMurali DharNo ratings yet
- Drill StringDocument72 pagesDrill StringRebar KakaNo ratings yet