Download as pdf or txt
You might also like
- Syllabus Plane and Solid GeometryDocument9 pagesSyllabus Plane and Solid GeometryJennifer Reyes100% (5)
- Math4 Q4 Mod2 FindingTheAreaOfTrianglesParallelogramsAndTrapezoid V4Document36 pagesMath4 Q4 Mod2 FindingTheAreaOfTrianglesParallelogramsAndTrapezoid V4REBECCA ABEDES100% (1)
- Five Diamonds Team Recommended Tools List 2014v3 3.15.14Document6 pagesFive Diamonds Team Recommended Tools List 2014v3 3.15.14jitender850% (2)
- Engineering Mechanics NotesDocument100 pagesEngineering Mechanics NotesRagothsingh Ramadoss67% (3)
- 03 Additions of VectorsDocument27 pages03 Additions of VectorstmmsekarNo ratings yet
- Vector Analysis PDFDocument5 pagesVector Analysis PDFasdfghjNo ratings yet
- Physics ProjectDocument12 pagesPhysics ProjectAditya SharmaNo ratings yet
- No. 1 Vectors and ScalarsDocument8 pagesNo. 1 Vectors and ScalarsMarlon Del-isen Dumal-isNo ratings yet
- vector algebraDocument15 pagesvector algebrasaurabh.21me012No ratings yet
- A Three Five Kilograms Twenty-Two Degrees Celsius: Scalar QuantitiesDocument6 pagesA Three Five Kilograms Twenty-Two Degrees Celsius: Scalar QuantitiesDars- Limos SaludezNo ratings yet
- 1.3 Scalars and Vectors: Bridge Course - Phy - I PUC 24Document8 pages1.3 Scalars and Vectors: Bridge Course - Phy - I PUC 24Jit AggNo ratings yet
- Basic Vector Geometry: Recommended Texts and WebsDocument7 pagesBasic Vector Geometry: Recommended Texts and WebsJayalal WettasingheNo ratings yet
- VEC&3DDocument120 pagesVEC&3DPHANINDRA MNo ratings yet
- VectorsDocument26 pagesVectorsAditya Bansal0% (1)
- Motion in PlaneDocument20 pagesMotion in PlanekartikthedashingNo ratings yet
- Chapter-1Document15 pagesChapter-1ZamrathNo ratings yet
- VectorsDocument29 pagesVectorsNico Urieta De AdeNo ratings yet
- Lecture L3 - Vectors, Matrices and Coordinate TransformationsDocument16 pagesLecture L3 - Vectors, Matrices and Coordinate TransformationsSquakx BescilNo ratings yet
- Teaching Notes - (Xiii) : VectorsDocument10 pagesTeaching Notes - (Xiii) : VectorsSankar KumarasamyNo ratings yet
- Microsoft PowerPoint - 2. ELMAG - 1 - Vector AlgebraDocument43 pagesMicrosoft PowerPoint - 2. ELMAG - 1 - Vector AlgebraDeni Ristianto100% (1)
- Vector AnalysisDocument77 pagesVector Analysisalenair888100% (1)
- 5.VECTORS ex 5.1Document33 pages5.VECTORS ex 5.1prathameshamle05No ratings yet
- Part B: Little Wonders Convent SchoolDocument21 pagesPart B: Little Wonders Convent SchoolJITENDRA JAISWALNo ratings yet
- Part B: Little Wonders Convent SchoolDocument21 pagesPart B: Little Wonders Convent SchoolJITENDRA JAISWALNo ratings yet
- Part B: Little Wonders Convent SchoolDocument21 pagesPart B: Little Wonders Convent SchoolJITENDRA JAISWALNo ratings yet
- IIT JEE Physics Free Notes: Mechanics - Vectors and ScalarsDocument4 pagesIIT JEE Physics Free Notes: Mechanics - Vectors and ScalarsDr.Balakrishnan Kishore67% (3)
- Vector AnalysisDocument76 pagesVector AnalysisLuLu SzcahliszhNo ratings yet
- Iit 3 UnlockedDocument185 pagesIit 3 UnlockedPrajwal KumarNo ratings yet
- VectorsDocument18 pagesVectorsvighneshmanojNo ratings yet
- Vector FlowDocument170 pagesVector FlowDevkriti SharmaNo ratings yet
- Some Key Points of VectorsDocument5 pagesSome Key Points of VectorsAkshay MishraNo ratings yet
- VectorsDocument9 pagesVectorsImash MinokaNo ratings yet
- Chapter - 2 ElevenhDocument4 pagesChapter - 2 ElevenhsaqibrahimkchiNo ratings yet
- ScalarsDocument11 pagesScalarsbisratbirhanu52No ratings yet
- 25 Vectors PDFDocument16 pages25 Vectors PDFAnurag KumarNo ratings yet
- FGJLKGFLKHFGFDDocument9 pagesFGJLKGFLKHFGFDIlario CutajarNo ratings yet
- 1 C4 Vectors: Louis Brooks April 11, 2008Document5 pages1 C4 Vectors: Louis Brooks April 11, 2008alawi1889No ratings yet
- Motion in Straight LineDocument12 pagesMotion in Straight LineamitctoNo ratings yet
- Module 1 Dsu PDFDocument32 pagesModule 1 Dsu PDFVinu RamadhasNo ratings yet
- Geo Cross RatioDocument31 pagesGeo Cross Ratioclrgeek100% (1)
- Statics-M L Khanna PDFDocument242 pagesStatics-M L Khanna PDFAnonymous Ku3Q3eChFNo ratings yet
- 02 Force Systems 3DDocument35 pages02 Force Systems 3DNasik AmimNo ratings yet
- Vector: Exambatofficial ExambatDocument18 pagesVector: Exambatofficial ExambatJAI SHREE RAMNo ratings yet
- CAD Dr.C.K.shene Geometric ConceptsDocument26 pagesCAD Dr.C.K.shene Geometric ConceptsDineshNewalkarNo ratings yet
- Vectors and ScalarsDocument29 pagesVectors and ScalarsMako GenobisNo ratings yet
- Chapter 06 PDFDocument29 pagesChapter 06 PDFMA. CARMELA REBUYASNo ratings yet
- Physics SampleDocument3 pagesPhysics SampleSoham GhoshNo ratings yet
- Btech 1st Sem: Maths: Vector Algebra and Vector CalculusDocument7 pagesBtech 1st Sem: Maths: Vector Algebra and Vector CalculusTechno India GroupNo ratings yet
- Revision Notes On VectorDocument7 pagesRevision Notes On VectorPavanNo ratings yet
- Chapter 19Document22 pagesChapter 19Tawhid Ahmed sifatNo ratings yet
- Vectors: Vector Analysis-A Language of PhysicsDocument15 pagesVectors: Vector Analysis-A Language of Physicsprabhu81No ratings yet
- VectorsDocument34 pagesVectorsSesha Sai Kumar100% (1)
- Btech 1st Sem: Maths: Vector AlgebraDocument9 pagesBtech 1st Sem: Maths: Vector AlgebraTechno India GroupNo ratings yet
- VectorsDocument46 pagesVectorsmonika gompa100% (1)
- Motion in A Plane Part 1 CH4Document26 pagesMotion in A Plane Part 1 CH4Rishab SharmaNo ratings yet
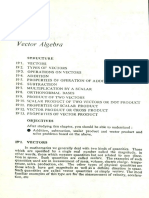
- Unit 1 Vectors - 1: StuctureDocument109 pagesUnit 1 Vectors - 1: StuctureJaheerNo ratings yet
- 03 Equilibrium of Concurrent Forces Force TableDocument6 pages03 Equilibrium of Concurrent Forces Force TableBenjie Catulin BuceNo ratings yet
- VectoriDocument22 pagesVectoriStefan LucianNo ratings yet
- Vector and Tensor Analysis with ApplicationsFrom EverandVector and Tensor Analysis with ApplicationsRating: 4 out of 5 stars4/5 (10)
- Nifty IndicesDocument19 pagesNifty Indicesjitender8No ratings yet
- Microsoft Word - Circles 10Document4 pagesMicrosoft Word - Circles 10jitender8No ratings yet
- How Do I Start Investing in Stocks? I Am A Beginner and Have No Idea About The Stock MarketDocument26 pagesHow Do I Start Investing in Stocks? I Am A Beginner and Have No Idea About The Stock Marketjitender80% (1)
- QUESTION 1: in How Many Ways 8 Identical One Rupee Coins Can Be Distributed Among 3 Beggars? SolutionDocument2 pagesQUESTION 1: in How Many Ways 8 Identical One Rupee Coins Can Be Distributed Among 3 Beggars? Solutionjitender8No ratings yet
- Pot Sot Formulas FairDocument2 pagesPot Sot Formulas Fairjitender8No ratings yet
- Bansal Career Institute: Test MathematicsDocument2 pagesBansal Career Institute: Test Mathematicsjitender8No ratings yet
- Microsoft Word - CPPDocument2 pagesMicrosoft Word - CPPjitender8No ratings yet
- Cartesian Coordinate Geometry and Straight Lines-3Document65 pagesCartesian Coordinate Geometry and Straight Lines-3jitender8No ratings yet
- 03 04 Length of The PerpendicularDocument18 pages03 04 Length of The Perpendicularjitender8No ratings yet
- Bansal Sheet SolutionDocument147 pagesBansal Sheet Solutionjitender833% (3)
- Cartesian Coordinate Geometry and Straight Lines-3Document65 pagesCartesian Coordinate Geometry and Straight Lines-3jitender8No ratings yet
- Quadratic Equations-3Document46 pagesQuadratic Equations-3jitender80% (1)
- Challenge 20 Vectors 3 Dimensional Geometry Linear Programming ProblemsDocument1 pageChallenge 20 Vectors 3 Dimensional Geometry Linear Programming Problemsjitender8No ratings yet
- 01 - Sets, Relations and FunctionsDocument6 pages01 - Sets, Relations and Functionsjitender8No ratings yet
- Challenge 30 Areas Differential EquationsDocument1 pageChallenge 30 Areas Differential Equationsjitender8No ratings yet
- Advanced Level Questions Class-12Document16 pagesAdvanced Level Questions Class-12jitender8No ratings yet
- Jlhhvalue Based Questions Class-12Document16 pagesJlhhvalue Based Questions Class-12jitender8No ratings yet
- Math-9-Q3-Module 1 QuadrilateralsDocument13 pagesMath-9-Q3-Module 1 QuadrilateralsErnie Estrera100% (7)
- Maths Ix Question Bank For Sa-Ii PDFDocument102 pagesMaths Ix Question Bank For Sa-Ii PDFRicha BhargavaNo ratings yet
- Iemh108 PDFDocument17 pagesIemh108 PDFpiruthvi chendurNo ratings yet
- MathsVIII PDFDocument63 pagesMathsVIII PDFArjunNo ratings yet
- The Basics: Twenty-Seven ProblemsDocument15 pagesThe Basics: Twenty-Seven ProblemskheyNo ratings yet
- Analytic Geometry - Quarter 1 - Week 3Document8 pagesAnalytic Geometry - Quarter 1 - Week 3L. RikaNo ratings yet
- Verification of Law of Concurrent ForcesDocument4 pagesVerification of Law of Concurrent ForcesJs Engineering WorkshopNo ratings yet
- Class 9 PT 2Document3 pagesClass 9 PT 2Ravishankar MeenaNo ratings yet
- Sample Paper (Class 9) - SA2Document7 pagesSample Paper (Class 9) - SA2vinod1577No ratings yet
- Quadrilateral SDocument3 pagesQuadrilateral Sskh_1987No ratings yet
- Practice Paper1Document2 pagesPractice Paper1Eliyasuddin AliNo ratings yet
- 9 ICSE HHW May23 1Document10 pages9 ICSE HHW May23 1Madiha IramNo ratings yet
- 6 4 Rhombuses Rectangles and SquaresDocument14 pages6 4 Rhombuses Rectangles and SquaresJuztine ReyesNo ratings yet
- Vectors and The Parallelogram Rule: Concept-Development Practice PageDocument2 pagesVectors and The Parallelogram Rule: Concept-Development Practice PageMMGoNo ratings yet
- Instruc OnsDocument18 pagesInstruc Onsdivya9 shahNo ratings yet
- g9 - ProvingDocument28 pagesg9 - ProvingOrenia Junia Lumauig RanjoNo ratings yet
- Math9 Q3 Mod1 ConditionsthatMakeaQuadrilateralaparallelogram v3Document21 pagesMath9 Q3 Mod1 ConditionsthatMakeaQuadrilateralaparallelogram v3IMELDA MARFA100% (1)
- 14 Loci and TransformationsDocument83 pages14 Loci and TransformationsSkruput QNo ratings yet
- TheoremsDocument8 pagesTheoremsanjustic25No ratings yet
- Midline TheoremDocument19 pagesMidline TheoremArlene Polis Delos Reyes100% (4)
- Math9 Q3 Module2Document12 pagesMath9 Q3 Module2Aldrin BagasinaNo ratings yet
- Mark DLP Final Apr 21Document17 pagesMark DLP Final Apr 21Samuel BaunNo ratings yet
- Asynch 4.3 - RAT REVIEWERDocument4 pagesAsynch 4.3 - RAT REVIEWERRogelio EscobarNo ratings yet
- Modul English For Engineering I (TM2)Document25 pagesModul English For Engineering I (TM2)SenoNo ratings yet
- QuadrilateralsDocument18 pagesQuadrilateralsAileen G. Domingo100% (1)
- Paper 2Document18 pagesPaper 214570001No ratings yet
- 6-Venus Math Quarter 4 TestDocument2 pages6-Venus Math Quarter 4 TestEldon KingNo ratings yet