Download as pdf or txt
You might also like
- Ch6 Evans BA1e Case SolutionDocument30 pagesCh6 Evans BA1e Case Solutionyarli77770% (1)
- User Manual-Stringing Machine-Pro's Pro Tomcat MT-400Document10 pagesUser Manual-Stringing Machine-Pro's Pro Tomcat MT-400kippcamNo ratings yet
- SX 2 XGQ 50F ProgramingDocument22 pagesSX 2 XGQ 50F ProgramingLinh50% (2)
- Arburg 221 ManualDocument92 pagesArburg 221 ManualZeljko Djukic73% (15)
- ZJ-LCD-M Manual Instruction Flow Meter DisplayDocument7 pagesZJ-LCD-M Manual Instruction Flow Meter Displaypatrick50% (6)
- Notice Tokai Lar-216 en AnglaisDocument9 pagesNotice Tokai Lar-216 en AnglaisCalvin StreetingNo ratings yet
- Doosan Servo Driven Tail Stock MANUAL - ENGDocument5 pagesDoosan Servo Driven Tail Stock MANUAL - ENGmarkoskitp100% (1)
- Calibration Procedure UKDocument15 pagesCalibration Procedure UKartNo ratings yet
- PLC Applications Workbook - Dayanand, RickyDocument240 pagesPLC Applications Workbook - Dayanand, RickyPeter Nomikos100% (1)
- Manual Fresadora X4 SyilDocument78 pagesManual Fresadora X4 SyilCarlosNo ratings yet
- HMP1 User Manual.00Document8 pagesHMP1 User Manual.00Manuel AlarconNo ratings yet
- IV-H Series IV-HG Series: User's ManualDocument134 pagesIV-H Series IV-HG Series: User's ManualEdgar Orendain ArriagaNo ratings yet
- FWD Rev Three Phase Motor Using Timer PDFDocument1 pageFWD Rev Three Phase Motor Using Timer PDFghanNo ratings yet
- WHB04B-4:4 WHB04B-6:6Document15 pagesWHB04B-4:4 WHB04B-6:6Marko CuricNo ratings yet
- Interlocking Examples PDFDocument2 pagesInterlocking Examples PDFghanNo ratings yet
- Tutorial 2Document5 pagesTutorial 2Shreyash ButleNo ratings yet
- SrgvaevfafDocument4 pagesSrgvaevfafbassistbaseNo ratings yet
- Manual StrandjackDocument17 pagesManual StrandjackSusanto HidayatNo ratings yet
- Counter Applications PDFDocument3 pagesCounter Applications PDFghanNo ratings yet
- Manual of GH500-Standard Model For Your Reference-Topwell LivDocument13 pagesManual of GH500-Standard Model For Your Reference-Topwell LivromdreNo ratings yet
- 8X8 BitmultiplierDocument26 pages8X8 BitmultiplierRenju TjNo ratings yet
- 1.21. Tipos y Apli de Tornos CNCDocument19 pages1.21. Tipos y Apli de Tornos CNCCarlos Alberto Andrade NaranjoNo ratings yet
- Instruction of 3D Tube Bender (DOBLADORA DE TUBOS CHINA)Document19 pagesInstruction of 3D Tube Bender (DOBLADORA DE TUBOS CHINA)MauricioNo ratings yet
- Monitoring Mouse ActivityDocument5 pagesMonitoring Mouse ActivityaarthiNo ratings yet
- Motor Conditional ControlDocument1 pageMotor Conditional ControlghanNo ratings yet
- Maquina FanucDocument24 pagesMaquina FanucpatricioNo ratings yet
- 21 BLOkon - 02 - 1.0 - ManualDocument24 pages21 BLOkon - 02 - 1.0 - Manualgetasew altasebNo ratings yet
- Body Control Module: Ed BCMDocument30 pagesBody Control Module: Ed BCMpapipapiiNo ratings yet
- PLCProject 10Document2 pagesPLCProject 10ASDF LKJNo ratings yet
- Electron Pneumatic CircuitDocument59 pagesElectron Pneumatic CircuitArun SìvaNo ratings yet
- Note-9 Timer OperationDocument28 pagesNote-9 Timer OperationAndeeNo ratings yet
- 05 DVP PLC Application Examples PDFDocument169 pages05 DVP PLC Application Examples PDFAlexCanenciaNo ratings yet
- Ascon IO XS ENDocument1 pageAscon IO XS ENthiodoroNo ratings yet
- Lava Aire Italia - Amit Misty Misting Fan - Owners ManualDocument7 pagesLava Aire Italia - Amit Misty Misting Fan - Owners ManuallavaheatitaliaNo ratings yet
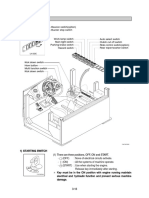
- Switches: Starting Switch There Are Three Positions, OFF, ON and START. 1)Document5 pagesSwitches: Starting Switch There Are Three Positions, OFF, ON and START. 1)JuNo ratings yet
- Installation ManualDocument9 pagesInstallation ManualDenis RaudseppNo ratings yet
- 改新500说明书Document13 pages改新500说明书JoseNo ratings yet
- TronicDocument20 pagesTronicgrzegorzNo ratings yet
- PLC Application Exercise - LDDocument33 pagesPLC Application Exercise - LDMazarel AurelNo ratings yet
- Nice 3000控制系统常见问题解决指南.zh Cn.enDocument20 pagesNice 3000控制系统常见问题解决指南.zh Cn.enTroubleshootingNo ratings yet
- Start Up and ChecksDocument12 pagesStart Up and ChecksGamal Hari PrasetyoNo ratings yet
- PLC ActivityDocument2 pagesPLC ActivityHarsha KotuwegedaraNo ratings yet
- Gemini 7561 PDFDocument9 pagesGemini 7561 PDFwww_lili_pulpaNo ratings yet
- Industrial Automation Group AssignmentDocument5 pagesIndustrial Automation Group Assignmenteyoule abdiNo ratings yet
- GantryProductOperationManual (10.118.48.x) NewUIDocument104 pagesGantryProductOperationManual (10.118.48.x) NewUInabil aliliNo ratings yet
- DSP NK105 Operating Instruction DSP Control System DSP Operate ManualDocument7 pagesDSP NK105 Operating Instruction DSP Control System DSP Operate ManualMd. Atiqur Rahman TalukdarNo ratings yet
- MaintWRD 2 - enDocument7 pagesMaintWRD 2 - envojtech.salzmannNo ratings yet
- Toyota TVIP System ProgrammingDocument11 pagesToyota TVIP System Programmingcheerios353No ratings yet
- Short Operating Manual ALLROUNDER 221 KDocument92 pagesShort Operating Manual ALLROUNDER 221 Km asifNo ratings yet
- As58 (Pfaff)Document16 pagesAs58 (Pfaff)jongaeckNo ratings yet
- Carbonated Filler MannuelDocument8 pagesCarbonated Filler MannuelDániel CLNo ratings yet
- lc090 2 Way Car Alarm System Host ManualDocument11 pageslc090 2 Way Car Alarm System Host Manualhebert.taypeNo ratings yet
- Vacuum Robot QQ2LT User ManualDocument14 pagesVacuum Robot QQ2LT User ManualMartinKennethMichalskyNo ratings yet
- Daitsu APD12 New ManualDocument26 pagesDaitsu APD12 New ManualGeorge ShanidzeNo ratings yet
- KPA 400 Software Manual V2.0Document5 pagesKPA 400 Software Manual V2.0danNo ratings yet
- User Manual For Bluetooth Pro Controller For Nintendo SwitchDocument6 pagesUser Manual For Bluetooth Pro Controller For Nintendo SwitchDiego Jose Del Angel HerreraNo ratings yet
- E21 Operation Manual: (Version: V1.04)Document27 pagesE21 Operation Manual: (Version: V1.04)Тимур АлиевNo ratings yet
- Manual of IC Control Panel 1Document7 pagesManual of IC Control Panel 1elektrikal medisafeNo ratings yet
- 12V Central Lock Universal Remote For Keyless Entry P/N 900.550Document10 pages12V Central Lock Universal Remote For Keyless Entry P/N 900.550MohamedNo ratings yet
- Fujifilm X100VI: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsFrom EverandFujifilm X100VI: Pocket Guide: Buttons, Dials, Settings, Modes, and Shooting TipsNo ratings yet
- Programme Title:: (Dd/mm/yyyy) (XXX)Document4 pagesProgramme Title:: (Dd/mm/yyyy) (XXX)ghanNo ratings yet
- Why Jesus Became ManDocument6 pagesWhy Jesus Became Manghan100% (1)
- Water and Waste Water Management Solutions: Modern Storage Tank Inspection TechniquesDocument26 pagesWater and Waste Water Management Solutions: Modern Storage Tank Inspection TechniquesghanNo ratings yet
- API 5ct S Pipe Drifts Casing Data ChartDocument1 pageAPI 5ct S Pipe Drifts Casing Data ChartghanNo ratings yet
- Product Information Bulletin: Handling ToolsDocument7 pagesProduct Information Bulletin: Handling ToolsghanNo ratings yet
- AerodynamicsDocument4 pagesAerodynamicsghan0% (1)
- IG4DB A 2 @28B : V/) /c.a (/) - /WZ Ax/z (../..d//az C-'/.Document3 pagesIG4DB A 2 @28B : V/) /c.a (/) - /WZ Ax/z (../..d//az C-'/.ghanNo ratings yet
- Technical Manual: 5 1/2" Clincher® Uht T 5 1/2" UHT B 5 1/2" LOCKJAW™ D P BDocument136 pagesTechnical Manual: 5 1/2" Clincher® Uht T 5 1/2" UHT B 5 1/2" LOCKJAW™ D P BghanNo ratings yet
- Wiper Seal Data Sheet A02 B 11782 1 enDocument2 pagesWiper Seal Data Sheet A02 B 11782 1 enghanNo ratings yet
- Head Clearances Around Screw Heads ... : Home Screws Index Page..Document2 pagesHead Clearances Around Screw Heads ... : Home Screws Index Page..ghanNo ratings yet
- Oilite CatalogueDocument26 pagesOilite CatalogueghanNo ratings yet
- Pub021 006 00 - 1112Document4 pagesPub021 006 00 - 1112HERRI MADJIDNo ratings yet
- Rtos 1Document22 pagesRtos 1VariNo ratings yet
- Iucaa NewDocument17 pagesIucaa Newarijit mannaNo ratings yet
- Mov A,#30h Mov r0,#40h Mov r1,#42 Loop: Mov @r0, A Inc r0 DJNZ r1, Loop .EndDocument80 pagesMov A,#30h Mov r0,#40h Mov r1,#42 Loop: Mov @r0, A Inc r0 DJNZ r1, Loop .EndAbhishek TiwariNo ratings yet
- Tecnicas Interpolacion Var ClimaDocument34 pagesTecnicas Interpolacion Var ClimaDaniel NúñezNo ratings yet
- Cambridge IGCSE: PHYSICS 0625/52Document12 pagesCambridge IGCSE: PHYSICS 0625/52Susan GeorgeNo ratings yet
- Solutions - AIATS JEE (Adv) - 2018 (CBT Mode) - Test-5A - Paper-1 - (22-04-2018) PDFDocument6 pagesSolutions - AIATS JEE (Adv) - 2018 (CBT Mode) - Test-5A - Paper-1 - (22-04-2018) PDFBHARAT CHANDWANINo ratings yet
- Nauticus Hull - Steel Plates UnstiffenedDocument90 pagesNauticus Hull - Steel Plates Unstiffenedbosskoj100% (1)
- Cryptography PHD Thesis PDFDocument7 pagesCryptography PHD Thesis PDFsuejonessalem100% (2)
- CBSE Class 8 Science WorksheetDocument2 pagesCBSE Class 8 Science Worksheetravilulla33% (3)
- Survey of Boosting From An Optimization Perspective: ICML 2009 TutorialDocument3 pagesSurvey of Boosting From An Optimization Perspective: ICML 2009 TutorialAugustoTexNo ratings yet
- Sec 06-01 PDFDocument26 pagesSec 06-01 PDFtempthereNo ratings yet
- 6890 Alcatel Lucent Delivering Comprehensive Enterprise DCC SecurityDocument11 pages6890 Alcatel Lucent Delivering Comprehensive Enterprise DCC SecurityAlexanderNo ratings yet
- Implementation of Circle, Line and Ellipse Drawing AlgorithmDocument35 pagesImplementation of Circle, Line and Ellipse Drawing AlgorithmPavithra RajaramNo ratings yet
- Lean Six Sigma Project Presentation TemplateDocument25 pagesLean Six Sigma Project Presentation TemplateNasrullah KhanNo ratings yet
- IR Drop PDFDocument3 pagesIR Drop PDFarammartNo ratings yet
- Imaging Den To Facial TraitsDocument25 pagesImaging Den To Facial TraitshaydarfadelNo ratings yet
- Red Book Section 122Document18 pagesRed Book Section 122Alejandro ViscarraNo ratings yet
- Ups Less TrafoDocument4 pagesUps Less Trafoleko17No ratings yet
- Ecology Ncert BIO Short Notes Deepak AIIMSonianDocument4 pagesEcology Ncert BIO Short Notes Deepak AIIMSoniantrivedit86No ratings yet
- Comprehension of Ratio (Lesson Plan)Document3 pagesComprehension of Ratio (Lesson Plan)Rayan CastroNo ratings yet
- Discussion Muir Wood Circular Tunnel in Elastic GroundDocument7 pagesDiscussion Muir Wood Circular Tunnel in Elastic GroundAmmar SohailNo ratings yet
- Engineering Thermodynamics Solutions ManualDocument32 pagesEngineering Thermodynamics Solutions ManualMahesh NadarNo ratings yet
- Bloch Sphere DerivationDocument3 pagesBloch Sphere DerivationPAVITHRAN SRIDHAR100% (1)
- Viki ProjectDocument31 pagesViki ProjectsingamNo ratings yet
- Quintel Product Datasheet QS86512 2 700 2400 8ft 65deg FEB 2017 Rev 1.6Document2 pagesQuintel Product Datasheet QS86512 2 700 2400 8ft 65deg FEB 2017 Rev 1.6Cecil PinPerNo ratings yet
- Ch3 ExtendedDocument79 pagesCh3 ExtendedMohammad Mahmudur RahmanNo ratings yet
- g9 Combined VariationDocument22 pagesg9 Combined VariationEggs eggyNo ratings yet
- P s l τ t s s τ s l P: Visit us at: www.nodia.co.inDocument1 pageP s l τ t s s τ s l P: Visit us at: www.nodia.co.inSameerChauhanNo ratings yet