
Report Aydin
Report Aydin
You might also like
- 7 Habits of Highly Effective People PPT - Covey StephenDocument142 pages7 Habits of Highly Effective People PPT - Covey StephenVijay Kumar100% (11)
- Detailed Lesson Plan in Physical Education Grade 6Document6 pagesDetailed Lesson Plan in Physical Education Grade 6cia-gail cueto92% (13)
- Hydro Structure PapersDocument157 pagesHydro Structure PapersChen Chu-yunNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Operation Manual: This Manual Also Covers The Seakeeper 7Hd ModelDocument35 pagesOperation Manual: This Manual Also Covers The Seakeeper 7Hd Modelmyusuf_engineer100% (1)
- Self StudyDocument33 pagesSelf StudySalim DanielaNo ratings yet
- Dark Heresy Character Sheet 5 PageDocument5 pagesDark Heresy Character Sheet 5 PagePreacher8794No ratings yet
- Bmst5103-Hesan Raj Part 3Document34 pagesBmst5103-Hesan Raj Part 3HesanRajaraniNo ratings yet
- Zamry 222Document1 pageZamry 222sahjidinzamriNo ratings yet
- MSC Thesis G.izzo RepDocument279 pagesMSC Thesis G.izzo RepMirceaNo ratings yet
- Thesis Report EAF Pigeaud PS Platform DesignDocument142 pagesThesis Report EAF Pigeaud PS Platform DesignPrathamesh Omtech100% (1)
- Suez Canal Transit MiniguideDocument34 pagesSuez Canal Transit MiniguideNikhilVinayNo ratings yet
- Marine TechnologyDocument72 pagesMarine Technologyusman nawazNo ratings yet
- Dynamic Analysis of Floating Dock Structures PDFDriveDocument152 pagesDynamic Analysis of Floating Dock Structures PDFDriveKate Jane TajanNo ratings yet
- AJK Loadout Sea FasteningDocument2 pagesAJK Loadout Sea FasteningQusairy Abdul RahmanNo ratings yet
- Master Opp GaveDocument184 pagesMaster Opp GaveChahbi RamziNo ratings yet
- Shippaxguide16: Extract From The Annual Publication Shippax Guide 16. Presentation of ACL's ATLANTIC STARDocument68 pagesShippaxguide16: Extract From The Annual Publication Shippax Guide 16. Presentation of ACL's ATLANTIC STARЕгор Лядов100% (1)
- HeidelbergMediaBooklet 121916 SmallDocument20 pagesHeidelbergMediaBooklet 121916 SmallIGusti Made Agni Prameswara100% (1)
- Ship Hydrodynamics, Mooring Analysis Tech RPT PDFDocument86 pagesShip Hydrodynamics, Mooring Analysis Tech RPT PDFHammadNo ratings yet
- Ejb-2023!22!002-Ra Ravi Kiran Design BasisDocument47 pagesEjb-2023!22!002-Ra Ravi Kiran Design BasisDesh DeepakNo ratings yet
- Vessel General ArrangementDocument1 pageVessel General ArrangementPaul RodgersNo ratings yet
- Final Report Kevin WatteDocument142 pagesFinal Report Kevin Wattefarhan_82No ratings yet
- 6785 PDFDocument5 pages6785 PDFSandip SurNo ratings yet
- Outline: Navigation Engineering: Understanding The BasicsDocument25 pagesOutline: Navigation Engineering: Understanding The BasicsIan WarnerNo ratings yet
- DynpacDocument51 pagesDynpacRossNo ratings yet
- Why Good Mooring Systems Go Bad 7 16 14Document41 pagesWhy Good Mooring Systems Go Bad 7 16 14pradewoNo ratings yet
- HL707 Aidcg CR 002 R0Document89 pagesHL707 Aidcg CR 002 R0dheeraj SureshNo ratings yet
- The Dynamics of Mooring Systems PDFDocument141 pagesThe Dynamics of Mooring Systems PDFMirsoNo ratings yet
- Naval Architucture & Offshore EngineeringDocument21 pagesNaval Architucture & Offshore EngineeringSavad AlwyeNo ratings yet
- General Information: Ampe (Lumut) Operations Weekly ReportDocument3 pagesGeneral Information: Ampe (Lumut) Operations Weekly ReportBoyNo ratings yet
- Fatigue Reability Ship StructuresDocument303 pagesFatigue Reability Ship StructuresJorge CiprianoNo ratings yet
- ALE Terex-AC100 Brochure1Document7 pagesALE Terex-AC100 Brochure1LasNo ratings yet
- Moses ManualDocument392 pagesMoses ManualAri Rizki RivaldoNo ratings yet
- Management Petroleum ActivitiesDocument68 pagesManagement Petroleum Activitiesusman nawazNo ratings yet
- Analysis of Warping and Shear Stress For Ship StructuresDocument134 pagesAnalysis of Warping and Shear Stress For Ship StructuresSergio LanzellottoNo ratings yet
- NauticusHullv20 Tutorial CSRH-TankDocument118 pagesNauticusHullv20 Tutorial CSRH-Tankchldudwo2158No ratings yet
- Coefficients of Propeller-Hull Interaction in Inland Waterway Vessels PDFDocument8 pagesCoefficients of Propeller-Hull Interaction in Inland Waterway Vessels PDFKalipada SenNo ratings yet
- Ansys Linear Buckling Analysis Tutorial - by Drdalyo: L I E N FcritDocument2 pagesAnsys Linear Buckling Analysis Tutorial - by Drdalyo: L I E N FcritYuda HerdiantoNo ratings yet
- Finite Element Analysis of A Lifting Portable Offshore UnitDocument57 pagesFinite Element Analysis of A Lifting Portable Offshore UnitNoé InzunzaNo ratings yet
- CMM86503 - V1 Turret Chain Stopper Calculation PDFDocument24 pagesCMM86503 - V1 Turret Chain Stopper Calculation PDFTran LinhNo ratings yet
- Heerema Standard Criteria - Google 搜索Document3 pagesHeerema Standard Criteria - Google 搜索jasonwu1115No ratings yet
- Generating Spectral RAOsDocument4 pagesGenerating Spectral RAOsSalvatore MonacoNo ratings yet
- Thesis RGdeJongDocument108 pagesThesis RGdeJongNaval2014DNNo ratings yet
- 57 Zawtika Float-OverDocument3 pages57 Zawtika Float-OverBarney Mills100% (1)
- Rep1 Eng PDFDocument452 pagesRep1 Eng PDFdjodje1No ratings yet
- SACS MOSES InteropTransportation v1.3Document11 pagesSACS MOSES InteropTransportation v1.3Muh. Saeful MHNo ratings yet
- Barges - Ocean Going Workhorse PDFDocument12 pagesBarges - Ocean Going Workhorse PDFKelvin Xu100% (1)
- Vibration of Deckhouse StructuresDocument10 pagesVibration of Deckhouse StructuresrthyhtNo ratings yet
- Previews IMO R288E PreDocument8 pagesPreviews IMO R288E PrecarmenNo ratings yet
- Safeloading PDFDocument54 pagesSafeloading PDFFradjNo ratings yet
- Ultramarine Moses CrackDocument3 pagesUltramarine Moses CrackpothirajkalyanNo ratings yet
- FEA Buckling AnalysisDocument10 pagesFEA Buckling AnalysisalexrodriguezabcNo ratings yet
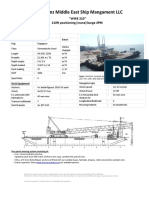
- Allianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMDocument2 pagesAllianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMCyril J PadiyathNo ratings yet
- The Modelling of Suction Caisson Foun-Dations For Multi-Footed StructuresDocument172 pagesThe Modelling of Suction Caisson Foun-Dations For Multi-Footed StructuresNguyen Thanh Duc BKNo ratings yet
- LOCG-GEN-Guideline-003 Rev 0 - Marine Lifting PDFDocument28 pagesLOCG-GEN-Guideline-003 Rev 0 - Marine Lifting PDFJohn PetterNo ratings yet
- Track Record Seafastenings PDFDocument14 pagesTrack Record Seafastenings PDFashaikhNo ratings yet
- Practical Source Code For Ship Motions Time Domain Numerical AnalysisDocument74 pagesPractical Source Code For Ship Motions Time Domain Numerical AnalysisYuriyAKNo ratings yet
- LOCG-GEN-Guideline-005 Rev 0 - Gravity Base StructuresDocument32 pagesLOCG-GEN-Guideline-005 Rev 0 - Gravity Base StructuresTomkel Voon100% (1)
- 5 Supplimetary Information ReportDocument39 pages5 Supplimetary Information ReportANIL KUMARNo ratings yet
- SHIPMODocument2 pagesSHIPMOartimus_2kNo ratings yet
- Its All About Bollard PullDocument10 pagesIts All About Bollard PullHanafi AjahNo ratings yet
- Statistical Design of FenderDocument7 pagesStatistical Design of FenderIgnatius SamrajNo ratings yet
- FinalProject PDFDocument91 pagesFinalProject PDFAlessandro MuragliaNo ratings yet
- Thesis On Shear Locking in FEMDocument70 pagesThesis On Shear Locking in FEMYo_RocksNo ratings yet
- Operation Liftboat FourDocument6 pagesOperation Liftboat Fourmyusuf_engineer100% (1)
- Operation Liftboat FiveDocument4 pagesOperation Liftboat Fivemyusuf_engineerNo ratings yet
- Recommended Boat Landing Geometry For Public Release: Key Assessment ParametersDocument2 pagesRecommended Boat Landing Geometry For Public Release: Key Assessment Parametersmyusuf_engineerNo ratings yet
- Operation Liftboat ThreeDocument5 pagesOperation Liftboat Threemyusuf_engineer100% (1)
- Operation Liftboat TwoDocument5 pagesOperation Liftboat Twomyusuf_engineer100% (1)
- Operation Liftboat OneDocument4 pagesOperation Liftboat Onemyusuf_engineerNo ratings yet
- Experts For Ship InteriorDocument32 pagesExperts For Ship Interiormyusuf_engineerNo ratings yet
- Statement of Account: Statement Date Credit Limit Minimum Payment Payment Due DateDocument4 pagesStatement of Account: Statement Date Credit Limit Minimum Payment Payment Due Datemyusuf_engineerNo ratings yet
- ROVJET 404 - Remotely Operated Vehicle: SpecificationsDocument1 pageROVJET 404 - Remotely Operated Vehicle: Specificationsmyusuf_engineerNo ratings yet
- Jensen Heavy Lift Marine Engineering BrochureDocument3 pagesJensen Heavy Lift Marine Engineering Brochuremyusuf_engineerNo ratings yet
- Hydraulic Fluid CategoriesDocument3 pagesHydraulic Fluid Categoriesmyusuf_engineerNo ratings yet
- Technical InformationDocument8 pagesTechnical Informationmyusuf_engineerNo ratings yet
- Coflex Hanger LocationDocument8 pagesCoflex Hanger Locationmyusuf_engineerNo ratings yet
- SHIELD Steel Piping Catalogue PF v.29 21Document52 pagesSHIELD Steel Piping Catalogue PF v.29 21myusuf_engineerNo ratings yet
- ChubbDocument13 pagesChubbmyusuf_engineerNo ratings yet
- F G Vendor List PDFDocument2 pagesF G Vendor List PDFmyusuf_engineerNo ratings yet
- Length of Roller 2000 MM Outer Diameter of Roller 500 MM Roller Drum Plate Thickness 20 MMDocument2 pagesLength of Roller 2000 MM Outer Diameter of Roller 500 MM Roller Drum Plate Thickness 20 MMmyusuf_engineerNo ratings yet
- Listening Strategies in TOEIC Test - 122746Document13 pagesListening Strategies in TOEIC Test - 122746corinaNo ratings yet
- SOP Logistic EN PDFDocument20 pagesSOP Logistic EN PDFArief Prasetya HarahapNo ratings yet
- MCQ Accounting DoneDocument7 pagesMCQ Accounting DonebinalamitNo ratings yet
- A Review of Artificial Intelligence Technologies To Achieve Machining ObjectivesDocument22 pagesA Review of Artificial Intelligence Technologies To Achieve Machining ObjectivesSaksham SetiaNo ratings yet
- Analysis of Sabrimala ControversyDocument29 pagesAnalysis of Sabrimala ControversyShambhavi PathakNo ratings yet
- Analysis of Variance: Testing Equality of Means Across GroupsDocument7 pagesAnalysis of Variance: Testing Equality of Means Across GroupsMuraliManoharNo ratings yet
- Carlo I Malatesta, WikiaDocument3 pagesCarlo I Malatesta, WikiaNupur PalNo ratings yet
- Final Submitted Multicultural Education Edci 585 Final Project Paper Submission 04 30 2020Document35 pagesFinal Submitted Multicultural Education Edci 585 Final Project Paper Submission 04 30 2020api-541251698No ratings yet
- Test Eng TensesDocument3 pagesTest Eng TensesAZIZAH KHUSNUL HANIFAHNo ratings yet
- BEED-525 FinalDocument17 pagesBEED-525 FinalMariecris Barayuga Duldulao-AbelaNo ratings yet
- Astrology - Am & RahukalamDocument2 pagesAstrology - Am & Rahukalamusf69No ratings yet
- Lecture 1 What Is CultureDocument12 pagesLecture 1 What Is CulturedivyaNo ratings yet
- Core ValuesDocument2 pagesCore ValuesKashaf RimshaNo ratings yet
- Minimalist Essays On BP Syntax - Jairo NunesDocument126 pagesMinimalist Essays On BP Syntax - Jairo NunesRenata MunhozNo ratings yet
- Annual Report 2012-13Document46 pagesAnnual Report 2012-13Ar123No ratings yet
- Sociology Ia SampleDocument21 pagesSociology Ia SampleNattala DunkleyNo ratings yet
- National Iron Plus Initiative Guidelines For Controlof IDADocument19 pagesNational Iron Plus Initiative Guidelines For Controlof IDAvvirumbi100% (1)
- Integration & Differentiation A3 NotesDocument16 pagesIntegration & Differentiation A3 NotesTshering TashiNo ratings yet
- MCQ VirologyDocument4 pagesMCQ Virologymostafaeldeeb2003No ratings yet
- Personal Bible ReflectionsDocument176 pagesPersonal Bible ReflectionsRegino Joel B. Josol100% (1)
- NSTP 2Document5 pagesNSTP 2Danica Pearl HortelanoNo ratings yet
- SCAFFOLDING Gibbons ChapterDocument29 pagesSCAFFOLDING Gibbons ChapterNeni WinartiNo ratings yet
- Mastermind 2 Unit 01 Grammar 1Document10 pagesMastermind 2 Unit 01 Grammar 1AntonioDehezaNo ratings yet
- Messiah - St. Bartholomew Episcopal Church The Nineteenth Sunday After PentecostDocument9 pagesMessiah - St. Bartholomew Episcopal Church The Nineteenth Sunday After PentecostIsaac BonneyNo ratings yet
- 150 Days in OfficeDocument5 pages150 Days in OfficeMoosa MohamedNo ratings yet
- Cultural Adaptation of CBTDocument11 pagesCultural Adaptation of CBTΕιρήνη ΤζιώκαNo ratings yet








































































































Download as pdf or txt
You might also like
- 7 Habits of Highly Effective People PPT - Covey StephenDocument142 pages7 Habits of Highly Effective People PPT - Covey StephenVijay Kumar100% (11)
- Detailed Lesson Plan in Physical Education Grade 6Document6 pagesDetailed Lesson Plan in Physical Education Grade 6cia-gail cueto92% (13)
- Hydro Structure PapersDocument157 pagesHydro Structure PapersChen Chu-yunNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Operation Manual: This Manual Also Covers The Seakeeper 7Hd ModelDocument35 pagesOperation Manual: This Manual Also Covers The Seakeeper 7Hd Modelmyusuf_engineer100% (1)
- Self StudyDocument33 pagesSelf StudySalim DanielaNo ratings yet
- Dark Heresy Character Sheet 5 PageDocument5 pagesDark Heresy Character Sheet 5 PagePreacher8794No ratings yet
- Bmst5103-Hesan Raj Part 3Document34 pagesBmst5103-Hesan Raj Part 3HesanRajaraniNo ratings yet
- Zamry 222Document1 pageZamry 222sahjidinzamriNo ratings yet
- MSC Thesis G.izzo RepDocument279 pagesMSC Thesis G.izzo RepMirceaNo ratings yet
- Thesis Report EAF Pigeaud PS Platform DesignDocument142 pagesThesis Report EAF Pigeaud PS Platform DesignPrathamesh Omtech100% (1)
- Suez Canal Transit MiniguideDocument34 pagesSuez Canal Transit MiniguideNikhilVinayNo ratings yet
- Marine TechnologyDocument72 pagesMarine Technologyusman nawazNo ratings yet
- Dynamic Analysis of Floating Dock Structures PDFDriveDocument152 pagesDynamic Analysis of Floating Dock Structures PDFDriveKate Jane TajanNo ratings yet
- AJK Loadout Sea FasteningDocument2 pagesAJK Loadout Sea FasteningQusairy Abdul RahmanNo ratings yet
- Master Opp GaveDocument184 pagesMaster Opp GaveChahbi RamziNo ratings yet
- Shippaxguide16: Extract From The Annual Publication Shippax Guide 16. Presentation of ACL's ATLANTIC STARDocument68 pagesShippaxguide16: Extract From The Annual Publication Shippax Guide 16. Presentation of ACL's ATLANTIC STARЕгор Лядов100% (1)
- HeidelbergMediaBooklet 121916 SmallDocument20 pagesHeidelbergMediaBooklet 121916 SmallIGusti Made Agni Prameswara100% (1)
- Ship Hydrodynamics, Mooring Analysis Tech RPT PDFDocument86 pagesShip Hydrodynamics, Mooring Analysis Tech RPT PDFHammadNo ratings yet
- Ejb-2023!22!002-Ra Ravi Kiran Design BasisDocument47 pagesEjb-2023!22!002-Ra Ravi Kiran Design BasisDesh DeepakNo ratings yet
- Vessel General ArrangementDocument1 pageVessel General ArrangementPaul RodgersNo ratings yet
- Final Report Kevin WatteDocument142 pagesFinal Report Kevin Wattefarhan_82No ratings yet
- 6785 PDFDocument5 pages6785 PDFSandip SurNo ratings yet
- Outline: Navigation Engineering: Understanding The BasicsDocument25 pagesOutline: Navigation Engineering: Understanding The BasicsIan WarnerNo ratings yet
- DynpacDocument51 pagesDynpacRossNo ratings yet
- Why Good Mooring Systems Go Bad 7 16 14Document41 pagesWhy Good Mooring Systems Go Bad 7 16 14pradewoNo ratings yet
- HL707 Aidcg CR 002 R0Document89 pagesHL707 Aidcg CR 002 R0dheeraj SureshNo ratings yet
- The Dynamics of Mooring Systems PDFDocument141 pagesThe Dynamics of Mooring Systems PDFMirsoNo ratings yet
- Naval Architucture & Offshore EngineeringDocument21 pagesNaval Architucture & Offshore EngineeringSavad AlwyeNo ratings yet
- General Information: Ampe (Lumut) Operations Weekly ReportDocument3 pagesGeneral Information: Ampe (Lumut) Operations Weekly ReportBoyNo ratings yet
- Fatigue Reability Ship StructuresDocument303 pagesFatigue Reability Ship StructuresJorge CiprianoNo ratings yet
- ALE Terex-AC100 Brochure1Document7 pagesALE Terex-AC100 Brochure1LasNo ratings yet
- Moses ManualDocument392 pagesMoses ManualAri Rizki RivaldoNo ratings yet
- Management Petroleum ActivitiesDocument68 pagesManagement Petroleum Activitiesusman nawazNo ratings yet
- Analysis of Warping and Shear Stress For Ship StructuresDocument134 pagesAnalysis of Warping and Shear Stress For Ship StructuresSergio LanzellottoNo ratings yet
- NauticusHullv20 Tutorial CSRH-TankDocument118 pagesNauticusHullv20 Tutorial CSRH-Tankchldudwo2158No ratings yet
- Coefficients of Propeller-Hull Interaction in Inland Waterway Vessels PDFDocument8 pagesCoefficients of Propeller-Hull Interaction in Inland Waterway Vessels PDFKalipada SenNo ratings yet
- Ansys Linear Buckling Analysis Tutorial - by Drdalyo: L I E N FcritDocument2 pagesAnsys Linear Buckling Analysis Tutorial - by Drdalyo: L I E N FcritYuda HerdiantoNo ratings yet
- Finite Element Analysis of A Lifting Portable Offshore UnitDocument57 pagesFinite Element Analysis of A Lifting Portable Offshore UnitNoé InzunzaNo ratings yet
- CMM86503 - V1 Turret Chain Stopper Calculation PDFDocument24 pagesCMM86503 - V1 Turret Chain Stopper Calculation PDFTran LinhNo ratings yet
- Heerema Standard Criteria - Google 搜索Document3 pagesHeerema Standard Criteria - Google 搜索jasonwu1115No ratings yet
- Generating Spectral RAOsDocument4 pagesGenerating Spectral RAOsSalvatore MonacoNo ratings yet
- Thesis RGdeJongDocument108 pagesThesis RGdeJongNaval2014DNNo ratings yet
- 57 Zawtika Float-OverDocument3 pages57 Zawtika Float-OverBarney Mills100% (1)
- Rep1 Eng PDFDocument452 pagesRep1 Eng PDFdjodje1No ratings yet
- SACS MOSES InteropTransportation v1.3Document11 pagesSACS MOSES InteropTransportation v1.3Muh. Saeful MHNo ratings yet
- Barges - Ocean Going Workhorse PDFDocument12 pagesBarges - Ocean Going Workhorse PDFKelvin Xu100% (1)
- Vibration of Deckhouse StructuresDocument10 pagesVibration of Deckhouse StructuresrthyhtNo ratings yet
- Previews IMO R288E PreDocument8 pagesPreviews IMO R288E PrecarmenNo ratings yet
- Safeloading PDFDocument54 pagesSafeloading PDFFradjNo ratings yet
- Ultramarine Moses CrackDocument3 pagesUltramarine Moses CrackpothirajkalyanNo ratings yet
- FEA Buckling AnalysisDocument10 pagesFEA Buckling AnalysisalexrodriguezabcNo ratings yet
- Allianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMDocument2 pagesAllianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMCyril J PadiyathNo ratings yet
- The Modelling of Suction Caisson Foun-Dations For Multi-Footed StructuresDocument172 pagesThe Modelling of Suction Caisson Foun-Dations For Multi-Footed StructuresNguyen Thanh Duc BKNo ratings yet
- LOCG-GEN-Guideline-003 Rev 0 - Marine Lifting PDFDocument28 pagesLOCG-GEN-Guideline-003 Rev 0 - Marine Lifting PDFJohn PetterNo ratings yet
- Track Record Seafastenings PDFDocument14 pagesTrack Record Seafastenings PDFashaikhNo ratings yet
- Practical Source Code For Ship Motions Time Domain Numerical AnalysisDocument74 pagesPractical Source Code For Ship Motions Time Domain Numerical AnalysisYuriyAKNo ratings yet
- LOCG-GEN-Guideline-005 Rev 0 - Gravity Base StructuresDocument32 pagesLOCG-GEN-Guideline-005 Rev 0 - Gravity Base StructuresTomkel Voon100% (1)
- 5 Supplimetary Information ReportDocument39 pages5 Supplimetary Information ReportANIL KUMARNo ratings yet
- SHIPMODocument2 pagesSHIPMOartimus_2kNo ratings yet
- Its All About Bollard PullDocument10 pagesIts All About Bollard PullHanafi AjahNo ratings yet
- Statistical Design of FenderDocument7 pagesStatistical Design of FenderIgnatius SamrajNo ratings yet
- FinalProject PDFDocument91 pagesFinalProject PDFAlessandro MuragliaNo ratings yet
- Thesis On Shear Locking in FEMDocument70 pagesThesis On Shear Locking in FEMYo_RocksNo ratings yet
- Operation Liftboat FourDocument6 pagesOperation Liftboat Fourmyusuf_engineer100% (1)
- Operation Liftboat FiveDocument4 pagesOperation Liftboat Fivemyusuf_engineerNo ratings yet
- Recommended Boat Landing Geometry For Public Release: Key Assessment ParametersDocument2 pagesRecommended Boat Landing Geometry For Public Release: Key Assessment Parametersmyusuf_engineerNo ratings yet
- Operation Liftboat ThreeDocument5 pagesOperation Liftboat Threemyusuf_engineer100% (1)
- Operation Liftboat TwoDocument5 pagesOperation Liftboat Twomyusuf_engineer100% (1)
- Operation Liftboat OneDocument4 pagesOperation Liftboat Onemyusuf_engineerNo ratings yet
- Experts For Ship InteriorDocument32 pagesExperts For Ship Interiormyusuf_engineerNo ratings yet
- Statement of Account: Statement Date Credit Limit Minimum Payment Payment Due DateDocument4 pagesStatement of Account: Statement Date Credit Limit Minimum Payment Payment Due Datemyusuf_engineerNo ratings yet
- ROVJET 404 - Remotely Operated Vehicle: SpecificationsDocument1 pageROVJET 404 - Remotely Operated Vehicle: Specificationsmyusuf_engineerNo ratings yet
- Jensen Heavy Lift Marine Engineering BrochureDocument3 pagesJensen Heavy Lift Marine Engineering Brochuremyusuf_engineerNo ratings yet
- Hydraulic Fluid CategoriesDocument3 pagesHydraulic Fluid Categoriesmyusuf_engineerNo ratings yet
- Technical InformationDocument8 pagesTechnical Informationmyusuf_engineerNo ratings yet
- Coflex Hanger LocationDocument8 pagesCoflex Hanger Locationmyusuf_engineerNo ratings yet
- SHIELD Steel Piping Catalogue PF v.29 21Document52 pagesSHIELD Steel Piping Catalogue PF v.29 21myusuf_engineerNo ratings yet
- ChubbDocument13 pagesChubbmyusuf_engineerNo ratings yet
- F G Vendor List PDFDocument2 pagesF G Vendor List PDFmyusuf_engineerNo ratings yet
- Length of Roller 2000 MM Outer Diameter of Roller 500 MM Roller Drum Plate Thickness 20 MMDocument2 pagesLength of Roller 2000 MM Outer Diameter of Roller 500 MM Roller Drum Plate Thickness 20 MMmyusuf_engineerNo ratings yet
- Listening Strategies in TOEIC Test - 122746Document13 pagesListening Strategies in TOEIC Test - 122746corinaNo ratings yet
- SOP Logistic EN PDFDocument20 pagesSOP Logistic EN PDFArief Prasetya HarahapNo ratings yet
- MCQ Accounting DoneDocument7 pagesMCQ Accounting DonebinalamitNo ratings yet
- A Review of Artificial Intelligence Technologies To Achieve Machining ObjectivesDocument22 pagesA Review of Artificial Intelligence Technologies To Achieve Machining ObjectivesSaksham SetiaNo ratings yet
- Analysis of Sabrimala ControversyDocument29 pagesAnalysis of Sabrimala ControversyShambhavi PathakNo ratings yet
- Analysis of Variance: Testing Equality of Means Across GroupsDocument7 pagesAnalysis of Variance: Testing Equality of Means Across GroupsMuraliManoharNo ratings yet
- Carlo I Malatesta, WikiaDocument3 pagesCarlo I Malatesta, WikiaNupur PalNo ratings yet
- Final Submitted Multicultural Education Edci 585 Final Project Paper Submission 04 30 2020Document35 pagesFinal Submitted Multicultural Education Edci 585 Final Project Paper Submission 04 30 2020api-541251698No ratings yet
- Test Eng TensesDocument3 pagesTest Eng TensesAZIZAH KHUSNUL HANIFAHNo ratings yet
- BEED-525 FinalDocument17 pagesBEED-525 FinalMariecris Barayuga Duldulao-AbelaNo ratings yet
- Astrology - Am & RahukalamDocument2 pagesAstrology - Am & Rahukalamusf69No ratings yet
- Lecture 1 What Is CultureDocument12 pagesLecture 1 What Is CulturedivyaNo ratings yet
- Core ValuesDocument2 pagesCore ValuesKashaf RimshaNo ratings yet
- Minimalist Essays On BP Syntax - Jairo NunesDocument126 pagesMinimalist Essays On BP Syntax - Jairo NunesRenata MunhozNo ratings yet
- Annual Report 2012-13Document46 pagesAnnual Report 2012-13Ar123No ratings yet
- Sociology Ia SampleDocument21 pagesSociology Ia SampleNattala DunkleyNo ratings yet
- National Iron Plus Initiative Guidelines For Controlof IDADocument19 pagesNational Iron Plus Initiative Guidelines For Controlof IDAvvirumbi100% (1)
- Integration & Differentiation A3 NotesDocument16 pagesIntegration & Differentiation A3 NotesTshering TashiNo ratings yet
- MCQ VirologyDocument4 pagesMCQ Virologymostafaeldeeb2003No ratings yet
- Personal Bible ReflectionsDocument176 pagesPersonal Bible ReflectionsRegino Joel B. Josol100% (1)
- NSTP 2Document5 pagesNSTP 2Danica Pearl HortelanoNo ratings yet
- SCAFFOLDING Gibbons ChapterDocument29 pagesSCAFFOLDING Gibbons ChapterNeni WinartiNo ratings yet
- Mastermind 2 Unit 01 Grammar 1Document10 pagesMastermind 2 Unit 01 Grammar 1AntonioDehezaNo ratings yet
- Messiah - St. Bartholomew Episcopal Church The Nineteenth Sunday After PentecostDocument9 pagesMessiah - St. Bartholomew Episcopal Church The Nineteenth Sunday After PentecostIsaac BonneyNo ratings yet
- 150 Days in OfficeDocument5 pages150 Days in OfficeMoosa MohamedNo ratings yet
- Cultural Adaptation of CBTDocument11 pagesCultural Adaptation of CBTΕιρήνη ΤζιώκαNo ratings yet