Download as pdf or txt
You might also like
- Renault Clio 2 Wiring Diagram PDFDocument14 pagesRenault Clio 2 Wiring Diagram PDFgustavo elbittar100% (5)
- Odrive OpenFFboard Guide 1Document4 pagesOdrive OpenFFboard Guide 1Metin Özgür100% (1)
- Hse DocumentDocument30 pagesHse DocumentAamir ShahzadNo ratings yet
- Installation Manual YC YDDocument54 pagesInstallation Manual YC YDIsrael ArceoNo ratings yet
- Logic Level Converter TXS0108EDocument16 pagesLogic Level Converter TXS0108ELuis TapiaNo ratings yet
- Multiservo Shield 1.1. FeaturesDocument7 pagesMultiservo Shield 1.1. FeaturesJay MenonNo ratings yet
- Perkins 4006 23TAG3A 800 KVADocument2 pagesPerkins 4006 23TAG3A 800 KVABudi S100% (1)
- Adafruit PCA9685 16-Channel Servo Driver: Created by Bill EarlDocument34 pagesAdafruit PCA9685 16-Channel Servo Driver: Created by Bill EarlAbdallah MiidouneNo ratings yet
- Hand Book On Your KnowledgeDocument45 pagesHand Book On Your KnowledgeVijay PreethamNo ratings yet
- Servo Driver HAT User Manual enDocument13 pagesServo Driver HAT User Manual enVictor Alexandru BusnitaNo ratings yet
- Adafruit Motor Shield v2 For ArduinoDocument65 pagesAdafruit Motor Shield v2 For ArduinoAlexandru BoldiciNo ratings yet
- Inverter Aurora ABB Power One Web Monitor WIM WithDocument14 pagesInverter Aurora ABB Power One Web Monitor WIM WithVimal KanthNo ratings yet
- Adafruit Motor Shield v2 For ArduinoDocument46 pagesAdafruit Motor Shield v2 For ArduinosacuarsNo ratings yet
- Rpi Based Waste ManagementDocument16 pagesRpi Based Waste ManagementVishwas VNo ratings yet
- Adafruit Motor ShieldDocument56 pagesAdafruit Motor ShieldBruno MoraisNo ratings yet
- Adafruit Microphone Amplifier BreakoutDocument14 pagesAdafruit Microphone Amplifier BreakoutFrew FrewNo ratings yet
- Adafruit Si5351 Clock Generator Breakout: Created by Lady AdaDocument26 pagesAdafruit Si5351 Clock Generator Breakout: Created by Lady AdaStevanus ColonneNo ratings yet
- ReadmeDocument10 pagesReadmefreeaccuhnt47888No ratings yet
- Spider Controller Instrucuction ManualDocument5 pagesSpider Controller Instrucuction ManualNabilo MarcelloNo ratings yet
- Processing Motor ControlDocument9 pagesProcessing Motor Controljosé_huisa_7No ratings yet
- Servo Library: CircuitDocument3 pagesServo Library: CircuitCosmin LookNo ratings yet
- Pan-Tilt HAT User Manual enDocument17 pagesPan-Tilt HAT User Manual enPhạm TuấnNo ratings yet
- 555 Timer Tutorials PDFDocument6 pages555 Timer Tutorials PDFOgunranti RasaqNo ratings yet
- 2.2.4.2 Alternate Lab - Servo - ILMDocument4 pages2.2.4.2 Alternate Lab - Servo - ILMkashifNo ratings yet
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- SparkFun Ethernet Shield Quickstart GuideDocument9 pagesSparkFun Ethernet Shield Quickstart Guidecartoonporn143No ratings yet
- Arbotix Manual Draft2Document8 pagesArbotix Manual Draft2chauhanrishabh100% (1)
- Adafruit - Feather m0 Wifi Atwinc1500Document67 pagesAdafruit - Feather m0 Wifi Atwinc1500Bobby100% (1)
- Wired Communication Between Two Arduinos: Graham Lambert Arduino 4Document75 pagesWired Communication Between Two Arduinos: Graham Lambert Arduino 4Olakanmi OluwatobiNo ratings yet
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSSergio Juan100% (1)
- SHD MStepper Motor Shield AdafruitDocument22 pagesSHD MStepper Motor Shield AdafruitRodolfo Tapia RamirezNo ratings yet
- Arduino: Servo Motors Diagrams & Code: Project 01: SweepDocument11 pagesArduino: Servo Motors Diagrams & Code: Project 01: Sweepkevin15No ratings yet
- Adafruit Ccs811 Air Quality Sensor-1396546Document22 pagesAdafruit Ccs811 Air Quality Sensor-1396546Camilo PradaNo ratings yet
- Adafruit Bno055 Absolute Orientation Sensor PDFDocument27 pagesAdafruit Bno055 Absolute Orientation Sensor PDFAnonymous 0Cbcvz15ZqNo ratings yet
- Adafruit Huzzah-ESP8266 BreakoutDocument50 pagesAdafruit Huzzah-ESP8266 BreakoutAlberto VillarNo ratings yet
- AD8495 Analog Output K-Type Thermocouple Amplifier: Created by Kattni RemborDocument18 pagesAD8495 Analog Output K-Type Thermocouple Amplifier: Created by Kattni RemborVincent MNo ratings yet
- User'S Manual: JULY, 2015Document12 pagesUser'S Manual: JULY, 2015Mudassar RafiqNo ratings yet
- Adafruit Mma8451 Accelerometer BreakoutDocument22 pagesAdafruit Mma8451 Accelerometer BreakoutIvory VyloveNo ratings yet
- EM Project Report - Rugaya - TaggedDocument13 pagesEM Project Report - Rugaya - Taggedmomosasahaha34No ratings yet
- 220V DC To 220V AC: DIY Inverter Part 2: InstructablesDocument10 pages220V DC To 220V AC: DIY Inverter Part 2: InstructablesTnT ElektricNo ratings yet
- 4-Kanal L293D - ENGDocument24 pages4-Kanal L293D - ENGwilsnicoNo ratings yet
- MPU6050 6-Axis Accelerometer and Gyro: Created by Bryan SiepertDocument19 pagesMPU6050 6-Axis Accelerometer and Gyro: Created by Bryan Siepertdavid suwarno sukartoNo ratings yet
- AVR Development BoardDocument18 pagesAVR Development BoardVardhan BhojeNo ratings yet
- Servo MotorDocument2 pagesServo Motortileeling1110No ratings yet
- Cnc4Pc: ManualDocument5 pagesCnc4Pc: ManualClaudio AlmiciNo ratings yet
- Adafruit Max31856 Thermocouple AmplifierDocument22 pagesAdafruit Max31856 Thermocouple AmplifierViet NguyenHoangNo ratings yet
- DLink De805tp Switch User ManualDocument19 pagesDLink De805tp Switch User Manualstd78519No ratings yet
- Build Your Own Quadcopter Flight ControllerDocument13 pagesBuild Your Own Quadcopter Flight ControlleraphongdoNo ratings yet
- ADC DiffPreamplifierDocument7 pagesADC DiffPreamplifierFurkan IşıldakNo ratings yet
- AVR Hardware Design ConsiderationsDocument14 pagesAVR Hardware Design ConsiderationsAmarnath M Damodaran100% (1)
- HP Fcpixracer1 Man PDFDocument16 pagesHP Fcpixracer1 Man PDFChrisNo ratings yet
- Tutorial: Simple WEP Crack: "What Is An ARP?" Linux Newbie Guide Installing Aircrack-Ng Installing DriversDocument5 pagesTutorial: Simple WEP Crack: "What Is An ARP?" Linux Newbie Guide Installing Aircrack-Ng Installing DriversPascal InoznopNo ratings yet
- Apa External Isp AnDocument18 pagesApa External Isp AnMathew P ZachariaNo ratings yet
- Arduino Playground - MPU-6050Document28 pagesArduino Playground - MPU-6050DragoșNo ratings yet
- 16 Channel PWM Servo DriverDocument30 pages16 Channel PWM Servo DriverManunoghiNo ratings yet
- IoT Based Raspberry Pi Smart Energy MonitorDocument17 pagesIoT Based Raspberry Pi Smart Energy MonitorKoushik Maity100% (1)
- Simple Wep Crack (Aircrack-Ng)Document5 pagesSimple Wep Crack (Aircrack-Ng)Fernando GonzalezNo ratings yet
- Turngy 9x ManualDocument7 pagesTurngy 9x Manualتيه تاريق مادوNo ratings yet
- First Steps With The Hardware (Base Kit)Document27 pagesFirst Steps With The Hardware (Base Kit)amrina aliNo ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142From EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142No ratings yet
- Aplab High Voltage DC Lab 300V 5000V 1Document1 pageAplab High Voltage DC Lab 300V 5000V 1drvikaasNo ratings yet
- Summer LEE - E-Scooter - Citycoco2023Document38 pagesSummer LEE - E-Scooter - Citycoco2023dersNo ratings yet
- A Refrigerator That Runs Without ElectricityDocument9 pagesA Refrigerator That Runs Without ElectricityMohin RoshanNo ratings yet
- CS 305 Microprocessors and MicrocontrollersDocument26 pagesCS 305 Microprocessors and MicrocontrollerslaraNo ratings yet
- Total Surface Coating SolutionsDocument6 pagesTotal Surface Coating SolutionsterebetteNo ratings yet
- Machine User ManualDocument14 pagesMachine User ManualSakhawat AbbasNo ratings yet
- mPro-200-V2 CatalogDocument20 pagesmPro-200-V2 CatalogAmol BhaleraoNo ratings yet
- Extreme Networks Consolidated XOS Hardware Installation GuideDocument162 pagesExtreme Networks Consolidated XOS Hardware Installation GuidejoseNo ratings yet
- Torque Calculation - ASME PCC-1Document5 pagesTorque Calculation - ASME PCC-1Rakesh ReddyNo ratings yet
- Repair Guide-HLS71EJ-iU - 55E6000Document27 pagesRepair Guide-HLS71EJ-iU - 55E6000Birciu ValiNo ratings yet
- TU BBA 1st Sem Computer RefDocument74 pagesTU BBA 1st Sem Computer RefRajiv RimalNo ratings yet
- CGAT Catalog0303Document2 pagesCGAT Catalog0303Chinith HengNo ratings yet
- Ertical Type Cosmetic Cream Ointment Sauce Filler Equipment With HeatingDocument13 pagesErtical Type Cosmetic Cream Ointment Sauce Filler Equipment With HeatingAbd Al-Rahmman Al-qatananiNo ratings yet
- PI734B-Wdg 13Document6 pagesPI734B-Wdg 13tony suNo ratings yet
- Control and Alarm Units: This Section Lists The Spare Parts For The Earlier Variant of RBS 2116Document30 pagesControl and Alarm Units: This Section Lists The Spare Parts For The Earlier Variant of RBS 2116Noale Daniel100% (3)
- SHS-PRE-FINAL ExamDocument2 pagesSHS-PRE-FINAL ExamDante NavajaNo ratings yet
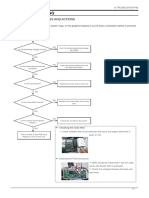
- Troubleshooting: 6-1. Symptoms, Diagnoses and ActionsDocument16 pagesTroubleshooting: 6-1. Symptoms, Diagnoses and ActionsIsidro MendozaNo ratings yet
- AN-SM-035 Fenced Perimeter Installations - FD500 Series Rev B 9-12Document30 pagesAN-SM-035 Fenced Perimeter Installations - FD500 Series Rev B 9-12German PovedaNo ratings yet
- Onkyo Ht-r380 SMDocument83 pagesOnkyo Ht-r380 SMCharles HardisonNo ratings yet
- Flir 617 DrawingsDocument11 pagesFlir 617 DrawingsfernandopfrancaNo ratings yet
- A State of Art Different Configurations of Permanent Magnet Brushless MachinesDocument11 pagesA State of Art Different Configurations of Permanent Magnet Brushless MachinesAlban MundangepfpfuNo ratings yet
- A1sy40 PDFDocument73 pagesA1sy40 PDFHoang NguyenNo ratings yet
- Section 16342 - Metal Clad SwitchgearDocument3 pagesSection 16342 - Metal Clad SwitchgearMahyar MashayekhiNo ratings yet
- 10 Datasheet 14825 Toothed Belt Pulleys T10 Profile - en PDFDocument2 pages10 Datasheet 14825 Toothed Belt Pulleys T10 Profile - en PDFAli AliNo ratings yet
- Wire EDM Lab ReportDocument5 pagesWire EDM Lab ReportEdgar ThorpeNo ratings yet
- H 4300 Woltmann Meter M 190 Multi-Jet MeterDocument2 pagesH 4300 Woltmann Meter M 190 Multi-Jet MeterMohammad ZeeshanNo ratings yet