Download as pdf or txt
You might also like
- Benedict Anderson Cultural RootsDocument4 pagesBenedict Anderson Cultural RootsVanessa Silva100% (1)
- Mbaz504 Statistics For ManagerDocument174 pagesMbaz504 Statistics For ManagerChenai Ignatius KanyenzeNo ratings yet
- 2.2.4.2 Alternate Lab - ServoDocument4 pages2.2.4.2 Alternate Lab - ServoErik C. LeonNo ratings yet
- Chapter 6Document22 pagesChapter 6Nurul Abdul Jalil100% (1)
- Tender Evaluation CriteriaDocument6 pagesTender Evaluation CriteriaXaverius ジミー HartantoNo ratings yet
- Bassetti - A Digital Forensic ReportDocument4 pagesBassetti - A Digital Forensic ReportxetnuNo ratings yet
- An Observational Theory For Mobile Ad Hoc NetworksDocument29 pagesAn Observational Theory For Mobile Ad Hoc NetworksmuraliprofilesNo ratings yet
- On The Fundamental Tradeoff of Integrated Sensing and Communications Under Gaussian ChannelsDocument29 pagesOn The Fundamental Tradeoff of Integrated Sensing and Communications Under Gaussian Channelssima.sobhi70No ratings yet
- Efficient WirelessDocument9 pagesEfficient WirelessshivaspyNo ratings yet
- Proposal of KMSTME Data Mining Clustering Method For Prolonging Life of Wireless Sensor NetworksDocument5 pagesProposal of KMSTME Data Mining Clustering Method For Prolonging Life of Wireless Sensor NetworksMladen Maki VukNo ratings yet
- Energy Efficient Signal Acquisition in Wireless Sensor Networks: A Compressive Sensing FrameworkDocument17 pagesEnergy Efficient Signal Acquisition in Wireless Sensor Networks: A Compressive Sensing FrameworkajyshowNo ratings yet
- Ditributed DL On FGDocument6 pagesDitributed DL On FGBurak SekerlisoyNo ratings yet
- Mtm-Based Spectrum Sensing in Cognitive Wireless Multimedia Sensor Networks (C-WMSNS)Document5 pagesMtm-Based Spectrum Sensing in Cognitive Wireless Multimedia Sensor Networks (C-WMSNS)Abdul RahimNo ratings yet
- A Novel Approach For Finding Optimal Number of Cluster Head in Wireless Sensor NetworkDocument5 pagesA Novel Approach For Finding Optimal Number of Cluster Head in Wireless Sensor NetworkbhanupartapsharmaNo ratings yet
- Ofdm Cognitive Radio ThesisDocument4 pagesOfdm Cognitive Radio Thesisjmvnqiikd100% (2)
- Nonconvex Optimization For Communication SystemsDocument48 pagesNonconvex Optimization For Communication Systemsayush89No ratings yet
- Barrage RelayDocument8 pagesBarrage RelayRajasekar Raja100% (1)
- A Novel MAI Reduction Method Using Longer M Sequences For Multiuser Detection in DS/CDMA Communication SystemsDocument9 pagesA Novel MAI Reduction Method Using Longer M Sequences For Multiuser Detection in DS/CDMA Communication SystemsMoazh TawabNo ratings yet
- Decision Fusion in MIMO Wireless Sensor Networks With Channel State InformationDocument4 pagesDecision Fusion in MIMO Wireless Sensor Networks With Channel State InformationHukum ChoudharyNo ratings yet
- Bayesian and RBF Structures For Re Less Co U Cat Ions Detect IonDocument10 pagesBayesian and RBF Structures For Re Less Co U Cat Ions Detect IonAr FatimzahraNo ratings yet
- Zero-Forcing Methods For Downlink Spatial Multiplexing in Multi-User MIMO ChannelsDocument27 pagesZero-Forcing Methods For Downlink Spatial Multiplexing in Multi-User MIMO Channelshendra lamNo ratings yet
- Interference Mitigation Under Degrees-of-Freedom Sensing Uncertainties in Opportunistic TransmissionDocument6 pagesInterference Mitigation Under Degrees-of-Freedom Sensing Uncertainties in Opportunistic Transmissionsa9046407No ratings yet
- Optimal Soft Frequency Reuse and Dynamic Sub-Carrier Assignments in Cellular OFDMA NetworksDocument10 pagesOptimal Soft Frequency Reuse and Dynamic Sub-Carrier Assignments in Cellular OFDMA NetworksBudi Agus SetiawanNo ratings yet
- MichailovDocument5 pagesMichailovVarun Shashank ThandaNo ratings yet
- Effectual and Rapid Aggregate Data Collection Using Wireless Sensor NetworkDocument8 pagesEffectual and Rapid Aggregate Data Collection Using Wireless Sensor Networkeditor_ijtelNo ratings yet
- Beliefdetection PDFDocument6 pagesBeliefdetection PDFblokesNo ratings yet
- Novel MIMO Detection Algorithm For High-Order Constellations in The Complex DomainDocument14 pagesNovel MIMO Detection Algorithm For High-Order Constellations in The Complex DomainssivabeNo ratings yet
- Data-Driven-Based Beam Selection For Hybrid Beamforming in Ultra-Dense NetworksDocument10 pagesData-Driven-Based Beam Selection For Hybrid Beamforming in Ultra-Dense NetworksSofia BouchenakNo ratings yet
- 3gpp ThesisDocument5 pages3gpp Thesisydpsvbgld100% (2)
- DL Capacity Mgmt-WCDMADocument5 pagesDL Capacity Mgmt-WCDMAMehmet CetinNo ratings yet
- Enhancing The Performance of The DNDP AlgorithmDocument12 pagesEnhancing The Performance of The DNDP AlgorithmJohn BergNo ratings yet
- TG10 2Document5 pagesTG10 2m0hmdNo ratings yet
- A Cognitive Approach To The Detection of Spectrum Holes in Wireless NetworksDocument5 pagesA Cognitive Approach To The Detection of Spectrum Holes in Wireless NetworksAkan FidanNo ratings yet
- Asra Kousar Milli - AN IMPROVED HIERARCHICAL CLUSTERING APPROACH FOR MOBILE SENSOR NETWORKS USING TYPE-2 FUZZY LOGICDocument18 pagesAsra Kousar Milli - AN IMPROVED HIERARCHICAL CLUSTERING APPROACH FOR MOBILE SENSOR NETWORKS USING TYPE-2 FUZZY LOGICNitin MittalNo ratings yet
- Cross-Layer Design For Spectrum Sensing With Selection Diversity For Cognitive Radio SystemsDocument5 pagesCross-Layer Design For Spectrum Sensing With Selection Diversity For Cognitive Radio SystemsPawanKumar BarnwalNo ratings yet
- Sensing Coverage and Connectivity in Cognitive Radio Sensor NetworksDocument17 pagesSensing Coverage and Connectivity in Cognitive Radio Sensor NetworksJemish MaisuriaNo ratings yet
- Towards The Performance of ML and The Complexity of MMSE: A Hybrid Approach For Multiuser DetectionDocument12 pagesTowards The Performance of ML and The Complexity of MMSE: A Hybrid Approach For Multiuser Detectionprasannakumar_7No ratings yet
- Practical Issues Implementing Analog-to-Information: ConvertersDocument6 pagesPractical Issues Implementing Analog-to-Information: ConvertersMimitech JohnNo ratings yet
- DS-CDMA Cellular Systems Performance With Base Station Assignment, Power Control Error and Beamforming Over Multipath FadingDocument18 pagesDS-CDMA Cellular Systems Performance With Base Station Assignment, Power Control Error and Beamforming Over Multipath FadingAIRCC - IJCNCNo ratings yet
- Energy-Efficient Range Assignment in Heterogeneous Wireless Sensor NetworksDocument6 pagesEnergy-Efficient Range Assignment in Heterogeneous Wireless Sensor NetworksZahid FaridNo ratings yet
- Ja Moos 2017Document12 pagesJa Moos 2017Saad SaidNo ratings yet
- Network CodesDocument8 pagesNetwork CodesSonali DasNo ratings yet
- Random Access Transport Capacity: Jeffrey G. Andrews, Steven Weber, Marios Kountouris, Martin HaenggiDocument25 pagesRandom Access Transport Capacity: Jeffrey G. Andrews, Steven Weber, Marios Kountouris, Martin HaenggiHamza SaadNo ratings yet
- 2010 Connected Coverage in WSNs Based On CriticalDocument26 pages2010 Connected Coverage in WSNs Based On CriticalMohamed Hechmi JERIDINo ratings yet
- Evolution of Base Stations in Cellular Networks: Denser Deployment Versus CoordinationDocument5 pagesEvolution of Base Stations in Cellular Networks: Denser Deployment Versus Coordinationsans00nNo ratings yet
- Deep Channel Learning For Large Intelligent Surfaces Aided Mm-Wave Massive MIMO SystemsDocument5 pagesDeep Channel Learning For Large Intelligent Surfaces Aided Mm-Wave Massive MIMO SystemsJack Van JhonesNo ratings yet
- 01 Pzflex Ieee93Document7 pages01 Pzflex Ieee93Ridwan WkNo ratings yet
- Research Paper On Clustering in Wireless Sensor NetworksDocument5 pagesResearch Paper On Clustering in Wireless Sensor NetworkszrdhvcaodNo ratings yet
- Maximizing Lifetime For Data Aggregation in Wireless Sensor NetworksDocument12 pagesMaximizing Lifetime For Data Aggregation in Wireless Sensor NetworksivanNo ratings yet
- A Wavelet Compression Based Channel Feedback Protocol For Spatially Correlated Massive MIMO SystemsDocument5 pagesA Wavelet Compression Based Channel Feedback Protocol For Spatially Correlated Massive MIMO SystemsFakhar AbbasNo ratings yet
- Energy Efficient Algorithm For Broadcasting in Ad Hoc Wireless Sensor NetworksDocument26 pagesEnergy Efficient Algorithm For Broadcasting in Ad Hoc Wireless Sensor NetworksMohammed Samir KhokarNo ratings yet
- Akhtman PVB VTCDocument5 pagesAkhtman PVB VTCAli LashinNo ratings yet
- Sensors: Intelligent Reflecting Surface-Assisted Secure Multi-Input Single-Output Cognitive Radio TransmissionDocument22 pagesSensors: Intelligent Reflecting Surface-Assisted Secure Multi-Input Single-Output Cognitive Radio TransmissionalelignNo ratings yet
- Crown Com 2012Document7 pagesCrown Com 2012phuceltnNo ratings yet
- An Attention-Aided Deep Learning Framework For Massive MIMO Channel EstimationDocument13 pagesAn Attention-Aided Deep Learning Framework For Massive MIMO Channel Estimation郭zlNo ratings yet
- Linear and Nonlinear Techniques For Multibeam Joint Processing in Satellite CommunicationsDocument13 pagesLinear and Nonlinear Techniques For Multibeam Joint Processing in Satellite CommunicationsiinNo ratings yet
- CS For CR 2columnDocument24 pagesCS For CR 2columnVIVEK UPADHYAYANo ratings yet
- VLSI Implementation of Hard-And Soft-Output Sphere Decoding For Wide-Band MIMO SystemsDocument27 pagesVLSI Implementation of Hard-And Soft-Output Sphere Decoding For Wide-Band MIMO SystemsVimalNo ratings yet
- SopDocument19 pagesSopAbdul RazzaqNo ratings yet
- RRP: A Register Mechanism Routing Protocol in Wireless Sensor NetworksDocument8 pagesRRP: A Register Mechanism Routing Protocol in Wireless Sensor Networksبيكاتشو ChooNo ratings yet
- Estimation of The Optimal Number of Cluster-Heads in Sensor NetworkDocument8 pagesEstimation of The Optimal Number of Cluster-Heads in Sensor Networksnc_90No ratings yet
- Achieving Massive MIMO Spectral Efficiency With A Not-so-Large Number of AntennasDocument14 pagesAchieving Massive MIMO Spectral Efficiency With A Not-so-Large Number of AntennasBruno AlvimNo ratings yet
- Distributed Blind Adaptive Algorithms Based OnDocument7 pagesDistributed Blind Adaptive Algorithms Based OnShock SignalNo ratings yet
- Prospects of MIMO Techniques For Broadband Wireless Systems: T. Blajić, M.Družijanić, Z. ČimićDocument6 pagesProspects of MIMO Techniques For Broadband Wireless Systems: T. Blajić, M.Družijanić, Z. ČimićDamir MuzicNo ratings yet
- Handbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, ApplicationsFrom EverandHandbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, ApplicationsNo ratings yet
- Tutorial 1 Power Spectra For Line CodesDocument35 pagesTutorial 1 Power Spectra For Line Codesasifmagsi415No ratings yet
- Wireless CommunicationDocument21 pagesWireless Communicationasifmagsi415No ratings yet
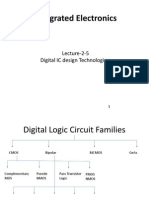
- Integrated Electronics: Lecture-2-5 Digital IC Design TechnologiesDocument27 pagesIntegrated Electronics: Lecture-2-5 Digital IC Design Technologiesasifmagsi415No ratings yet
- Application Form SAEFDocument5 pagesApplication Form SAEFasifmagsi415No ratings yet
- 08 Chapter 3Document41 pages08 Chapter 3aruna2707No ratings yet
- Maria Koenig: EducationDocument1 pageMaria Koenig: Educationapi-315857153No ratings yet
- 32 Bit Multiplication and Division ALU Design Based On RISC StructureDocument4 pages32 Bit Multiplication and Division ALU Design Based On RISC StructureVishnu Kumar NadarNo ratings yet
- Stats FormulasDocument54 pagesStats FormulasShruti ShrivastavaNo ratings yet
- Chavez VS Public Estates AuthorityDocument2 pagesChavez VS Public Estates AuthorityKirby MalibiranNo ratings yet
- Webplus - Contact FormsDocument13 pagesWebplus - Contact FormsjpatrNo ratings yet
- C Algorithms For Real Time DSP (1995-Scanned) - P EmbreeDocument250 pagesC Algorithms For Real Time DSP (1995-Scanned) - P EmbreeChandra SekharNo ratings yet
- Game Theory - Cooperative GamesDocument11 pagesGame Theory - Cooperative GamesSamiksha NihulNo ratings yet
- Bettis Cba 300 Series Pneumatic Actuators Us DataDocument6 pagesBettis Cba 300 Series Pneumatic Actuators Us DatasusantoNo ratings yet
- Dominique Laurent - Death Drive in The FeminineDocument10 pagesDominique Laurent - Death Drive in The Femininedalila544No ratings yet
- Minggu 3 Klasifikasi Massa BatuanDocument23 pagesMinggu 3 Klasifikasi Massa Batuanarwan_sipilNo ratings yet
- CSAT 2015 Orientation P1 GSDocument112 pagesCSAT 2015 Orientation P1 GSramyadav00No ratings yet
- An Introduction To MATLAB For GeoscientistsDocument161 pagesAn Introduction To MATLAB For GeoscientistskevinmuriNo ratings yet
- International Journal of Greenhouse Gas Control: Joshua A. White, William FoxallDocument12 pagesInternational Journal of Greenhouse Gas Control: Joshua A. White, William Foxallilyas twittNo ratings yet
- CharaDashaPart1BW PDFDocument10 pagesCharaDashaPart1BW PDFGurpreet Kaur100% (1)
- Bible Text ProbeDocument3 pagesBible Text ProbeAlthea Louise TrinidadNo ratings yet
- Epl2 Programmer's ManualDocument248 pagesEpl2 Programmer's ManualAnthony DaskalierosNo ratings yet
- The Future of WorkplaceDocument8 pagesThe Future of WorkplaceJazreel HardinNo ratings yet
- Prelude Sous Ubuntu 14 - 04Document5 pagesPrelude Sous Ubuntu 14 - 04sevemasse0% (1)
- DNA StructureDocument39 pagesDNA StructureCitra Lusyana0% (1)
- Fbi Student InternsDocument1 pageFbi Student Internsapi-268943277No ratings yet
- Maths Past PaperDocument23 pagesMaths Past PaperAvehiNo ratings yet
- Resume - Shio KhetsurianiDocument2 pagesResume - Shio KhetsurianiTIGeorgiaNo ratings yet
- An R Package For Item Response ModellingDocument39 pagesAn R Package For Item Response ModellingAnusorn KoedsriNo ratings yet