
GEM Depth of Penetration
GEM Depth of Penetration
You might also like
- 424a 2016Document5 pages424a 2016IrsyadnurJ.MargiantoNo ratings yet
- Quick Reference Card: For Use With Oasis MontajDocument2 pagesQuick Reference Card: For Use With Oasis MontajHayyan SabilNo ratings yet
- Choice of Wavelet - Harold RyanDocument2 pagesChoice of Wavelet - Harold Ryanmarvin12345678No ratings yet
- Geophysics Exploration - Chapter 6Document43 pagesGeophysics Exploration - Chapter 6Abraham SileshiNo ratings yet
- Gravity Method in Geophysical Exploration: April 2018Document41 pagesGravity Method in Geophysical Exploration: April 2018Rhadityo PerdanaNo ratings yet
- Use of Gravity and Magnetic Methods in ODocument14 pagesUse of Gravity and Magnetic Methods in OAyush KumarNo ratings yet
- Exer - 26b-1 DHI Modeling-North SeaDocument3 pagesExer - 26b-1 DHI Modeling-North SeazedNo ratings yet
- Surface Waves: Rayleigh and Love Waves Particle Motion Phase and Group Velocity DispersionDocument6 pagesSurface Waves: Rayleigh and Love Waves Particle Motion Phase and Group Velocity DispersionEzzadin BabanNo ratings yet
- Airborne Gamma-Ray Spectrometry SurveysDocument24 pagesAirborne Gamma-Ray Spectrometry Surveysvelkus2013No ratings yet
- Magnetotelluric MT Method in HydrocarbonDocument6 pagesMagnetotelluric MT Method in HydrocarbonMed MadrilènNo ratings yet
- Jurnal Geomigas PDFDocument65 pagesJurnal Geomigas PDFainunayu utamiNo ratings yet
- Shallow Groundwater Investigation Using Time-Domain Electromagnetic (TEM) Method at Itay El-Baroud, Nile Delta, EgyptDocument12 pagesShallow Groundwater Investigation Using Time-Domain Electromagnetic (TEM) Method at Itay El-Baroud, Nile Delta, EgyptBehar HusseinNo ratings yet
- Clear Identification of Nakamura (Nakamura, 2000) PDFDocument9 pagesClear Identification of Nakamura (Nakamura, 2000) PDFEvaNo ratings yet
- GF Instruments ARES 5ADocument2 pagesGF Instruments ARES 5ABudikaPaisokCipuikPWElfaAriyanNo ratings yet
- Electrical MethodDocument57 pagesElectrical MethodWubayehu DessalegnNo ratings yet
- GPRDocument5 pagesGPRrolandNo ratings yet
- The Magnetic SurveyDocument15 pagesThe Magnetic Surveymelannie adanteNo ratings yet
- Karous-Hjelt ManualDocument19 pagesKarous-Hjelt ManualRhama DiantoNo ratings yet
- Grav Mag5Document27 pagesGrav Mag5ebNo ratings yet
- RAI Attribute (Emujakporue Nigeria) PDFDocument11 pagesRAI Attribute (Emujakporue Nigeria) PDFFurqanButtNo ratings yet
- 1984 Achmad&Samuel, PDFDocument12 pages1984 Achmad&Samuel, PDFdwiky adimasNo ratings yet
- 11 Airborne Gravity Gradiometry in The Search For Mineral Deposits 20Document14 pages11 Airborne Gravity Gradiometry in The Search For Mineral Deposits 20Salvadora1No ratings yet
- Gravity Notes01Document43 pagesGravity Notes01evan8februariNo ratings yet
- Magnetic Surveying For Buried Metallic ObjectsDocument8 pagesMagnetic Surveying For Buried Metallic ObjectsV100% (4)
- Relating Seismic Interpretation To Reserve Resource CalculationsDocument10 pagesRelating Seismic Interpretation To Reserve Resource CalculationsYohannes LemmaNo ratings yet
- Geophysical Well Log AnalysisDocument4 pagesGeophysical Well Log AnalysisJerry EvansNo ratings yet
- Full Tensor CSEM and MT For Subsalt Structural Imaging in The Red Sea Implications For Seismic and Electromagnetic IntegrationDocument11 pagesFull Tensor CSEM and MT For Subsalt Structural Imaging in The Red Sea Implications For Seismic and Electromagnetic IntegrationilichgarNo ratings yet
- Tabel Klasifikasi Metode GeofisikaDocument2 pagesTabel Klasifikasi Metode GeofisikaRindangPermadiNo ratings yet
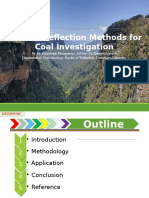
- Application of Seismic Reflection On CoalDocument22 pagesApplication of Seismic Reflection On CoalKhamvanh PhengnaoneNo ratings yet
- Influence of Test Equipment and Procedures On Obtained Accuracy in CPTUDocument26 pagesInfluence of Test Equipment and Procedures On Obtained Accuracy in CPTUalistuguiNo ratings yet
- Unit-III: Geophysical Methods of Mineral ExplorationDocument40 pagesUnit-III: Geophysical Methods of Mineral ExplorationMunther DhahirNo ratings yet
- Effective MagnetometerDocument17 pagesEffective MagnetometercartamenesNo ratings yet
- Electrical Resistivity Methods 13 PDFDocument108 pagesElectrical Resistivity Methods 13 PDFNamwangala Rashid NatinduNo ratings yet
- GM-SYS 3D Create New 3D ModelDocument5 pagesGM-SYS 3D Create New 3D ModelJuan PiretNo ratings yet
- Guidelines For Kinetic Input and Calibration of Petroleum System Models PDFDocument61 pagesGuidelines For Kinetic Input and Calibration of Petroleum System Models PDFc_b_umashankarNo ratings yet
- Statics Correction ElevationDocument9 pagesStatics Correction ElevationAndi Mahri100% (2)
- 428XL SpecsDocument6 pages428XL SpecsPalomino MoyaNo ratings yet
- Seisimager/Dh Manual: Windows Software For Analysis of Downhole SeismicDocument167 pagesSeisimager/Dh Manual: Windows Software For Analysis of Downhole SeismicAndrés Felipe CastroNo ratings yet
- Status Kualitas Perairan Situ Cisanti - Gunung Wayang, Subdas Cirasea Citarum HuluDocument9 pagesStatus Kualitas Perairan Situ Cisanti - Gunung Wayang, Subdas Cirasea Citarum HulukomaraNo ratings yet
- Introduction To CSAMTDocument7 pagesIntroduction To CSAMTNurlia AduNo ratings yet
- Geophysics Test Bank With Answers 2019Document26 pagesGeophysics Test Bank With Answers 2019mawaddahass13No ratings yet
- 002 Applied Geostatistics For Reservoir Char-Halaman-27-61 PDFDocument35 pages002 Applied Geostatistics For Reservoir Char-Halaman-27-61 PDFLAILA PUTRI YANTI BATUBARANo ratings yet
- Recent Advances in Nodal Land Seismic Acquisition Systems: ASEG Extended AbstractsDocument5 pagesRecent Advances in Nodal Land Seismic Acquisition Systems: ASEG Extended AbstractsМаксим Валерьевич ТарасовNo ratings yet
- Geophysical Methods For Petroleum ExplorationDocument30 pagesGeophysical Methods For Petroleum ExplorationGunalan RNo ratings yet
- Matgpr Manual R3Document109 pagesMatgpr Manual R3Xingfang91No ratings yet
- Tomography HumphreysDocument21 pagesTomography HumphreysMohd RezalNo ratings yet
- CFT and DFTDocument39 pagesCFT and DFTManav DasNo ratings yet
- Introduction To Geophysics: ERTH2020Document51 pagesIntroduction To Geophysics: ERTH2020Isna NurainiNo ratings yet
- Suggested Methods For Geophysical Logging of Boreholes: Part 1. TechnicalDocument16 pagesSuggested Methods For Geophysical Logging of Boreholes: Part 1. TechnicalAntonio PedroNo ratings yet
- GeophysicsDocument64 pagesGeophysicsrizkaNo ratings yet
- A Plane EM Wave Is Travelling Vertically Downwards in The Earth in The ZDocument3 pagesA Plane EM Wave Is Travelling Vertically Downwards in The Earth in The Zpata sharma100% (1)
- Emad PHD ThesisDocument204 pagesEmad PHD Thesishazim_74No ratings yet
- Gassman TutorialDocument11 pagesGassman TutorialKristian TorresNo ratings yet
- Preservation of Core Integrity: A Comparative Study of Core Stabilization ProductsDocument12 pagesPreservation of Core Integrity: A Comparative Study of Core Stabilization ProductsRosa K Chang HNo ratings yet
- Controlled Source Audio Frequency MagnetotelluricsDocument42 pagesControlled Source Audio Frequency MagnetotelluricsAditya AriesNo ratings yet
- Loading Angle Stacks As Angle Gathers in HRS-9: Mandy Jones 2013Document19 pagesLoading Angle Stacks As Angle Gathers in HRS-9: Mandy Jones 2013Reddy SetyawanNo ratings yet
- Fisika StatistikDocument61 pagesFisika StatistikNinaNo ratings yet
- PE6050Document1 pagePE6050abhiNo ratings yet
- Real-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)From EverandReal-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)No ratings yet
- Supplementary of Paper DahrenDocument29 pagesSupplementary of Paper DahrenAditya PratamaNo ratings yet
- Contoh Analisis Sayatan Tipis 2 PaperDocument19 pagesContoh Analisis Sayatan Tipis 2 PaperAditya PratamaNo ratings yet
- Baru 1Document20 pagesBaru 1Aditya PratamaNo ratings yet
- Experimental Calibration of The Effect of H2O On Plagioclase Crystallization in Basaltic Melt at 200 MpaDocument8 pagesExperimental Calibration of The Effect of H2O On Plagioclase Crystallization in Basaltic Melt at 200 MpaAditya PratamaNo ratings yet
- CINEST Symposium 2015Document1 pageCINEST Symposium 2015Aditya PratamaNo ratings yet
- 019 Icges2012 S10007Document5 pages019 Icges2012 S10007Aditya PratamaNo ratings yet
- Scholarship Benefits and Conditions: International Higher Degree by Research (HDR) StudentsDocument3 pagesScholarship Benefits and Conditions: International Higher Degree by Research (HDR) StudentsAditya PratamaNo ratings yet
- Error Correction Hamming Code PDFDocument2 pagesError Correction Hamming Code PDFDeborahNo ratings yet
- Sawdust 1Document10 pagesSawdust 1Hyun MinNo ratings yet
- SPL Konfort 7xx Full en Rev01Document8 pagesSPL Konfort 7xx Full en Rev01kallatisNo ratings yet
- Heat Shrink Busbar Insulation Tubing (Edbi) : Voltage Class 24 KV Application Ø 6.5 MM - 150 MMDocument2 pagesHeat Shrink Busbar Insulation Tubing (Edbi) : Voltage Class 24 KV Application Ø 6.5 MM - 150 MMdinhdoanspcNo ratings yet
- Ethylene ProductionDocument34 pagesEthylene ProductionWesleyNo ratings yet
- Automatic Transfer Switch ATS021: Installation and Operating Instructions 34ATS021 / 1SDH000759R0002Document36 pagesAutomatic Transfer Switch ATS021: Installation and Operating Instructions 34ATS021 / 1SDH000759R0002ase.olgaNo ratings yet
- DOB S.No. Subject Roll No. Marks Gender CommunityDocument455 pagesDOB S.No. Subject Roll No. Marks Gender CommunityDr.A.Vaniprabha snsNo ratings yet
- COMMS 1 - ModulationDocument5 pagesCOMMS 1 - ModulationmgoldiieeeeNo ratings yet
- Accident Manual PDFDocument263 pagesAccident Manual PDFsubhasish deyNo ratings yet
- Python 15CS664 QuestionBank FINALDocument5 pagesPython 15CS664 QuestionBank FINALAnu CadzieNo ratings yet
- Recipe - Bromhexine SyrupDocument1 pageRecipe - Bromhexine SyruprambabuNo ratings yet
- Paket Alat Laboratorium + LinkDocument2 pagesPaket Alat Laboratorium + LinkAgus CahyonoNo ratings yet
- tmp268D TMPDocument6 pagestmp268D TMPFrontiersNo ratings yet
- Practice PE Exam HVAC Breadth and DepthDocument15 pagesPractice PE Exam HVAC Breadth and DepthKareem Helal100% (2)
- Lightweight UavDocument149 pagesLightweight Uavvb corpNo ratings yet
- Power Daily MINIBUS A50.13-ENGLISHDocument14 pagesPower Daily MINIBUS A50.13-ENGLISHadolfo pacoNo ratings yet
- PQ Autoclave HPHV Steam SterilizerDocument26 pagesPQ Autoclave HPHV Steam SterilizerVitalis Mbuya100% (1)
- Report of Unchahar Unit 2 Bearing 6 VibrationDocument8 pagesReport of Unchahar Unit 2 Bearing 6 Vibrationshobhan1984No ratings yet
- HSS-320: Technical Writing and Presentation Skills: Department of Computer Science Bahria University, Karachi CampusDocument6 pagesHSS-320: Technical Writing and Presentation Skills: Department of Computer Science Bahria University, Karachi Campusminhas majeedNo ratings yet
- Manual 915 IsotechDocument26 pagesManual 915 IsotechErik ValterNo ratings yet
- VicRoads Supplement To The Austroads Guide To Bridge TechnologyDocument6 pagesVicRoads Supplement To The Austroads Guide To Bridge TechnologyJunnoKaiserNo ratings yet
- From Massey Ferguson: A & F ModelsDocument17 pagesFrom Massey Ferguson: A & F Modelsvejnik07No ratings yet
- 85001-0317 - Integrity Re-Entrant Speaker and Speaker-StrobeDocument6 pages85001-0317 - Integrity Re-Entrant Speaker and Speaker-StrobemohammadNo ratings yet
- KFC - KFX 210 - Control - System PDFDocument17 pagesKFC - KFX 210 - Control - System PDFDragomir HoffmannNo ratings yet
- Ejector A-Type - EllehammerDocument3 pagesEjector A-Type - EllehammerlucasNo ratings yet
- Supplier Conversion Code Ver1.7Document20 pagesSupplier Conversion Code Ver1.7nagaNo ratings yet
- E12536-0000-9002-01-07 Consumer List PDFDocument29 pagesE12536-0000-9002-01-07 Consumer List PDFDwi RatnoNo ratings yet
- 2nd Revised List of Empanelled Suppliers For Solar Inverter Charger - 1Document12 pages2nd Revised List of Empanelled Suppliers For Solar Inverter Charger - 1sachinkatyal24No ratings yet
- AVIONICS 16 Marks With AnsDocument32 pagesAVIONICS 16 Marks With Anssabari sabariNo ratings yet






























































































Download as pdf or txt
You might also like
- 424a 2016Document5 pages424a 2016IrsyadnurJ.MargiantoNo ratings yet
- Quick Reference Card: For Use With Oasis MontajDocument2 pagesQuick Reference Card: For Use With Oasis MontajHayyan SabilNo ratings yet
- Choice of Wavelet - Harold RyanDocument2 pagesChoice of Wavelet - Harold Ryanmarvin12345678No ratings yet
- Geophysics Exploration - Chapter 6Document43 pagesGeophysics Exploration - Chapter 6Abraham SileshiNo ratings yet
- Gravity Method in Geophysical Exploration: April 2018Document41 pagesGravity Method in Geophysical Exploration: April 2018Rhadityo PerdanaNo ratings yet
- Use of Gravity and Magnetic Methods in ODocument14 pagesUse of Gravity and Magnetic Methods in OAyush KumarNo ratings yet
- Exer - 26b-1 DHI Modeling-North SeaDocument3 pagesExer - 26b-1 DHI Modeling-North SeazedNo ratings yet
- Surface Waves: Rayleigh and Love Waves Particle Motion Phase and Group Velocity DispersionDocument6 pagesSurface Waves: Rayleigh and Love Waves Particle Motion Phase and Group Velocity DispersionEzzadin BabanNo ratings yet
- Airborne Gamma-Ray Spectrometry SurveysDocument24 pagesAirborne Gamma-Ray Spectrometry Surveysvelkus2013No ratings yet
- Magnetotelluric MT Method in HydrocarbonDocument6 pagesMagnetotelluric MT Method in HydrocarbonMed MadrilènNo ratings yet
- Jurnal Geomigas PDFDocument65 pagesJurnal Geomigas PDFainunayu utamiNo ratings yet
- Shallow Groundwater Investigation Using Time-Domain Electromagnetic (TEM) Method at Itay El-Baroud, Nile Delta, EgyptDocument12 pagesShallow Groundwater Investigation Using Time-Domain Electromagnetic (TEM) Method at Itay El-Baroud, Nile Delta, EgyptBehar HusseinNo ratings yet
- Clear Identification of Nakamura (Nakamura, 2000) PDFDocument9 pagesClear Identification of Nakamura (Nakamura, 2000) PDFEvaNo ratings yet
- GF Instruments ARES 5ADocument2 pagesGF Instruments ARES 5ABudikaPaisokCipuikPWElfaAriyanNo ratings yet
- Electrical MethodDocument57 pagesElectrical MethodWubayehu DessalegnNo ratings yet
- GPRDocument5 pagesGPRrolandNo ratings yet
- The Magnetic SurveyDocument15 pagesThe Magnetic Surveymelannie adanteNo ratings yet
- Karous-Hjelt ManualDocument19 pagesKarous-Hjelt ManualRhama DiantoNo ratings yet
- Grav Mag5Document27 pagesGrav Mag5ebNo ratings yet
- RAI Attribute (Emujakporue Nigeria) PDFDocument11 pagesRAI Attribute (Emujakporue Nigeria) PDFFurqanButtNo ratings yet
- 1984 Achmad&Samuel, PDFDocument12 pages1984 Achmad&Samuel, PDFdwiky adimasNo ratings yet
- 11 Airborne Gravity Gradiometry in The Search For Mineral Deposits 20Document14 pages11 Airborne Gravity Gradiometry in The Search For Mineral Deposits 20Salvadora1No ratings yet
- Gravity Notes01Document43 pagesGravity Notes01evan8februariNo ratings yet
- Magnetic Surveying For Buried Metallic ObjectsDocument8 pagesMagnetic Surveying For Buried Metallic ObjectsV100% (4)
- Relating Seismic Interpretation To Reserve Resource CalculationsDocument10 pagesRelating Seismic Interpretation To Reserve Resource CalculationsYohannes LemmaNo ratings yet
- Geophysical Well Log AnalysisDocument4 pagesGeophysical Well Log AnalysisJerry EvansNo ratings yet
- Full Tensor CSEM and MT For Subsalt Structural Imaging in The Red Sea Implications For Seismic and Electromagnetic IntegrationDocument11 pagesFull Tensor CSEM and MT For Subsalt Structural Imaging in The Red Sea Implications For Seismic and Electromagnetic IntegrationilichgarNo ratings yet
- Tabel Klasifikasi Metode GeofisikaDocument2 pagesTabel Klasifikasi Metode GeofisikaRindangPermadiNo ratings yet
- Application of Seismic Reflection On CoalDocument22 pagesApplication of Seismic Reflection On CoalKhamvanh PhengnaoneNo ratings yet
- Influence of Test Equipment and Procedures On Obtained Accuracy in CPTUDocument26 pagesInfluence of Test Equipment and Procedures On Obtained Accuracy in CPTUalistuguiNo ratings yet
- Unit-III: Geophysical Methods of Mineral ExplorationDocument40 pagesUnit-III: Geophysical Methods of Mineral ExplorationMunther DhahirNo ratings yet
- Effective MagnetometerDocument17 pagesEffective MagnetometercartamenesNo ratings yet
- Electrical Resistivity Methods 13 PDFDocument108 pagesElectrical Resistivity Methods 13 PDFNamwangala Rashid NatinduNo ratings yet
- GM-SYS 3D Create New 3D ModelDocument5 pagesGM-SYS 3D Create New 3D ModelJuan PiretNo ratings yet
- Guidelines For Kinetic Input and Calibration of Petroleum System Models PDFDocument61 pagesGuidelines For Kinetic Input and Calibration of Petroleum System Models PDFc_b_umashankarNo ratings yet
- Statics Correction ElevationDocument9 pagesStatics Correction ElevationAndi Mahri100% (2)
- 428XL SpecsDocument6 pages428XL SpecsPalomino MoyaNo ratings yet
- Seisimager/Dh Manual: Windows Software For Analysis of Downhole SeismicDocument167 pagesSeisimager/Dh Manual: Windows Software For Analysis of Downhole SeismicAndrés Felipe CastroNo ratings yet
- Status Kualitas Perairan Situ Cisanti - Gunung Wayang, Subdas Cirasea Citarum HuluDocument9 pagesStatus Kualitas Perairan Situ Cisanti - Gunung Wayang, Subdas Cirasea Citarum HulukomaraNo ratings yet
- Introduction To CSAMTDocument7 pagesIntroduction To CSAMTNurlia AduNo ratings yet
- Geophysics Test Bank With Answers 2019Document26 pagesGeophysics Test Bank With Answers 2019mawaddahass13No ratings yet
- 002 Applied Geostatistics For Reservoir Char-Halaman-27-61 PDFDocument35 pages002 Applied Geostatistics For Reservoir Char-Halaman-27-61 PDFLAILA PUTRI YANTI BATUBARANo ratings yet
- Recent Advances in Nodal Land Seismic Acquisition Systems: ASEG Extended AbstractsDocument5 pagesRecent Advances in Nodal Land Seismic Acquisition Systems: ASEG Extended AbstractsМаксим Валерьевич ТарасовNo ratings yet
- Geophysical Methods For Petroleum ExplorationDocument30 pagesGeophysical Methods For Petroleum ExplorationGunalan RNo ratings yet
- Matgpr Manual R3Document109 pagesMatgpr Manual R3Xingfang91No ratings yet
- Tomography HumphreysDocument21 pagesTomography HumphreysMohd RezalNo ratings yet
- CFT and DFTDocument39 pagesCFT and DFTManav DasNo ratings yet
- Introduction To Geophysics: ERTH2020Document51 pagesIntroduction To Geophysics: ERTH2020Isna NurainiNo ratings yet
- Suggested Methods For Geophysical Logging of Boreholes: Part 1. TechnicalDocument16 pagesSuggested Methods For Geophysical Logging of Boreholes: Part 1. TechnicalAntonio PedroNo ratings yet
- GeophysicsDocument64 pagesGeophysicsrizkaNo ratings yet
- A Plane EM Wave Is Travelling Vertically Downwards in The Earth in The ZDocument3 pagesA Plane EM Wave Is Travelling Vertically Downwards in The Earth in The Zpata sharma100% (1)
- Emad PHD ThesisDocument204 pagesEmad PHD Thesishazim_74No ratings yet
- Gassman TutorialDocument11 pagesGassman TutorialKristian TorresNo ratings yet
- Preservation of Core Integrity: A Comparative Study of Core Stabilization ProductsDocument12 pagesPreservation of Core Integrity: A Comparative Study of Core Stabilization ProductsRosa K Chang HNo ratings yet
- Controlled Source Audio Frequency MagnetotelluricsDocument42 pagesControlled Source Audio Frequency MagnetotelluricsAditya AriesNo ratings yet
- Loading Angle Stacks As Angle Gathers in HRS-9: Mandy Jones 2013Document19 pagesLoading Angle Stacks As Angle Gathers in HRS-9: Mandy Jones 2013Reddy SetyawanNo ratings yet
- Fisika StatistikDocument61 pagesFisika StatistikNinaNo ratings yet
- PE6050Document1 pagePE6050abhiNo ratings yet
- Real-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)From EverandReal-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)No ratings yet
- Supplementary of Paper DahrenDocument29 pagesSupplementary of Paper DahrenAditya PratamaNo ratings yet
- Contoh Analisis Sayatan Tipis 2 PaperDocument19 pagesContoh Analisis Sayatan Tipis 2 PaperAditya PratamaNo ratings yet
- Baru 1Document20 pagesBaru 1Aditya PratamaNo ratings yet
- Experimental Calibration of The Effect of H2O On Plagioclase Crystallization in Basaltic Melt at 200 MpaDocument8 pagesExperimental Calibration of The Effect of H2O On Plagioclase Crystallization in Basaltic Melt at 200 MpaAditya PratamaNo ratings yet
- CINEST Symposium 2015Document1 pageCINEST Symposium 2015Aditya PratamaNo ratings yet
- 019 Icges2012 S10007Document5 pages019 Icges2012 S10007Aditya PratamaNo ratings yet
- Scholarship Benefits and Conditions: International Higher Degree by Research (HDR) StudentsDocument3 pagesScholarship Benefits and Conditions: International Higher Degree by Research (HDR) StudentsAditya PratamaNo ratings yet
- Error Correction Hamming Code PDFDocument2 pagesError Correction Hamming Code PDFDeborahNo ratings yet
- Sawdust 1Document10 pagesSawdust 1Hyun MinNo ratings yet
- SPL Konfort 7xx Full en Rev01Document8 pagesSPL Konfort 7xx Full en Rev01kallatisNo ratings yet
- Heat Shrink Busbar Insulation Tubing (Edbi) : Voltage Class 24 KV Application Ø 6.5 MM - 150 MMDocument2 pagesHeat Shrink Busbar Insulation Tubing (Edbi) : Voltage Class 24 KV Application Ø 6.5 MM - 150 MMdinhdoanspcNo ratings yet
- Ethylene ProductionDocument34 pagesEthylene ProductionWesleyNo ratings yet
- Automatic Transfer Switch ATS021: Installation and Operating Instructions 34ATS021 / 1SDH000759R0002Document36 pagesAutomatic Transfer Switch ATS021: Installation and Operating Instructions 34ATS021 / 1SDH000759R0002ase.olgaNo ratings yet
- DOB S.No. Subject Roll No. Marks Gender CommunityDocument455 pagesDOB S.No. Subject Roll No. Marks Gender CommunityDr.A.Vaniprabha snsNo ratings yet
- COMMS 1 - ModulationDocument5 pagesCOMMS 1 - ModulationmgoldiieeeeNo ratings yet
- Accident Manual PDFDocument263 pagesAccident Manual PDFsubhasish deyNo ratings yet
- Python 15CS664 QuestionBank FINALDocument5 pagesPython 15CS664 QuestionBank FINALAnu CadzieNo ratings yet
- Recipe - Bromhexine SyrupDocument1 pageRecipe - Bromhexine SyruprambabuNo ratings yet
- Paket Alat Laboratorium + LinkDocument2 pagesPaket Alat Laboratorium + LinkAgus CahyonoNo ratings yet
- tmp268D TMPDocument6 pagestmp268D TMPFrontiersNo ratings yet
- Practice PE Exam HVAC Breadth and DepthDocument15 pagesPractice PE Exam HVAC Breadth and DepthKareem Helal100% (2)
- Lightweight UavDocument149 pagesLightweight Uavvb corpNo ratings yet
- Power Daily MINIBUS A50.13-ENGLISHDocument14 pagesPower Daily MINIBUS A50.13-ENGLISHadolfo pacoNo ratings yet
- PQ Autoclave HPHV Steam SterilizerDocument26 pagesPQ Autoclave HPHV Steam SterilizerVitalis Mbuya100% (1)
- Report of Unchahar Unit 2 Bearing 6 VibrationDocument8 pagesReport of Unchahar Unit 2 Bearing 6 Vibrationshobhan1984No ratings yet
- HSS-320: Technical Writing and Presentation Skills: Department of Computer Science Bahria University, Karachi CampusDocument6 pagesHSS-320: Technical Writing and Presentation Skills: Department of Computer Science Bahria University, Karachi Campusminhas majeedNo ratings yet
- Manual 915 IsotechDocument26 pagesManual 915 IsotechErik ValterNo ratings yet
- VicRoads Supplement To The Austroads Guide To Bridge TechnologyDocument6 pagesVicRoads Supplement To The Austroads Guide To Bridge TechnologyJunnoKaiserNo ratings yet
- From Massey Ferguson: A & F ModelsDocument17 pagesFrom Massey Ferguson: A & F Modelsvejnik07No ratings yet
- 85001-0317 - Integrity Re-Entrant Speaker and Speaker-StrobeDocument6 pages85001-0317 - Integrity Re-Entrant Speaker and Speaker-StrobemohammadNo ratings yet
- KFC - KFX 210 - Control - System PDFDocument17 pagesKFC - KFX 210 - Control - System PDFDragomir HoffmannNo ratings yet
- Ejector A-Type - EllehammerDocument3 pagesEjector A-Type - EllehammerlucasNo ratings yet
- Supplier Conversion Code Ver1.7Document20 pagesSupplier Conversion Code Ver1.7nagaNo ratings yet
- E12536-0000-9002-01-07 Consumer List PDFDocument29 pagesE12536-0000-9002-01-07 Consumer List PDFDwi RatnoNo ratings yet
- 2nd Revised List of Empanelled Suppliers For Solar Inverter Charger - 1Document12 pages2nd Revised List of Empanelled Suppliers For Solar Inverter Charger - 1sachinkatyal24No ratings yet
- AVIONICS 16 Marks With AnsDocument32 pagesAVIONICS 16 Marks With Anssabari sabariNo ratings yet