
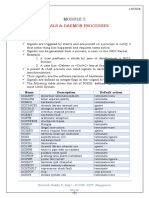
Unit 5 Signals: SIG Sigabrt Abort Sigalrm Alarm
Unit 5 Signals: SIG Sigabrt Abort Sigalrm Alarm
You might also like
- Allstate/McKinsey Bates H000001010Document495 pagesAllstate/McKinsey Bates H0000010104207west59th100% (3)
- Embedded Interview QuestionsDocument62 pagesEmbedded Interview QuestionsprathapNo ratings yet
- Crash N' Burn: Writing Linux Application Fault HandlersDocument25 pagesCrash N' Burn: Writing Linux Application Fault HandlersTuxology.net100% (4)
- Oral Notes Rupesh PillaiDocument172 pagesOral Notes Rupesh PillaiRachit100% (4)
- Lab04 SignalsDocument8 pagesLab04 SignalsRavinder K SinglaNo ratings yet
- 5 Signal ProcessingDocument40 pages5 Signal Processinggayathri nathNo ratings yet
- Sleep WakeDocument7 pagesSleep WakejaiNo ratings yet
- Signals and Daemon Processes UnixDocument30 pagesSignals and Daemon Processes UnixRahul SinhaNo ratings yet
- All About Linux SignalsDocument17 pagesAll About Linux SignalsSK_shivamNo ratings yet
- Unix Module 5Document30 pagesUnix Module 5study materialNo ratings yet
- Unit4 Signals Session 2Document21 pagesUnit4 Signals Session 2Amrin MulaniNo ratings yet
- Computer Networking Notes Module 5Document19 pagesComputer Networking Notes Module 5soujanyakilaru15No ratings yet
- Network Programming Notes - SignalsDocument6 pagesNetwork Programming Notes - Signalstaleysha vuyanziNo ratings yet
- CS312 Lec 11 12Document15 pagesCS312 Lec 11 12syedbasimmehmood1No ratings yet
- Unix Programming - Module 5Document12 pagesUnix Programming - Module 5Anusha SNo ratings yet
- UNIX Programming - Module 5 SlidesDocument81 pagesUNIX Programming - Module 5 SlidesLa QuicaNo ratings yet
- SignalDocument17 pagesSignalashish_mahanaNo ratings yet
- Signals: Based On Chapter 12.5 of Text What If Something Unexpected or Unpredictable Happens?Document17 pagesSignals: Based On Chapter 12.5 of Text What If Something Unexpected or Unpredictable Happens?Navdeep JimmyNo ratings yet
- Lab 4 - SignalsDocument26 pagesLab 4 - SignalsNourhan TarekNo ratings yet
- ch6信号处理Document36 pagesch6信号处理yueli98354No ratings yet
- Linux System Programming Part 5 - Interprocess Communication (IPC)Document21 pagesLinux System Programming Part 5 - Interprocess Communication (IPC)Калоян ТотевNo ratings yet
- Signals and Daemon Processes: UNIX ProgrammingDocument17 pagesSignals and Daemon Processes: UNIX ProgrammingVarun GowdaNo ratings yet
- Signals: Chapter 8 of Robbins BookDocument41 pagesSignals: Chapter 8 of Robbins BookelemaniaqNo ratings yet
- Unit4 SignalsDocument10 pagesUnit4 SignalsAmrin MulaniNo ratings yet
- Unix LinuxDocument5 pagesUnix LinuxkrkamaNo ratings yet
- Linux SignalsDocument3 pagesLinux SignalsavadcsNo ratings yet
- Program Error Signals (The GNU C Library)Document3 pagesProgram Error Signals (The GNU C Library)SteveNo ratings yet
- C++ Signal Handling: SR - No Signal & DescriptionDocument3 pagesC++ Signal Handling: SR - No Signal & DescriptionMirha KhanNo ratings yet
- Unix SignalsDocument42 pagesUnix SignalsRahul SreedharanNo ratings yet
- Signals, Daemon, IPCHKBKuspnotes Unit6 8 160505161037Document90 pagesSignals, Daemon, IPCHKBKuspnotes Unit6 8 160505161037Varad GalgaliNo ratings yet
- Signaling &interrupts in The Operating SystemDocument10 pagesSignaling &interrupts in The Operating SystemRagmahale RohitNo ratings yet
- Signal - Microsoft LearnDocument5 pagesSignal - Microsoft LearnShakti SharmaNo ratings yet
- Signal Names and PurposeDocument3 pagesSignal Names and PurposerealxsaloNo ratings yet
- Lab 12Document17 pagesLab 12Naz MemonNo ratings yet
- FahadKhan OS Lab10Document18 pagesFahadKhan OS Lab10Furious UploadNo ratings yet
- OS LAb 10Document11 pagesOS LAb 10Furious UploadNo ratings yet
- Causes of Signal: Unix Unix-LikeDocument2 pagesCauses of Signal: Unix Unix-LikeAmen AbatemameNo ratings yet
- CS312 Lec 10Document12 pagesCS312 Lec 10syedbasimmehmood1No ratings yet
- UNIX Module 5 NotesDocument23 pagesUNIX Module 5 NoteshibariseijiNo ratings yet
- Signals ManDocument12 pagesSignals ManMiki PerezNo ratings yet
- Unix System ProgammingDocument13 pagesUnix System ProgammingShivanand ManjaragiNo ratings yet
- All About Linux Signals - Linux Programming BlogDocument20 pagesAll About Linux Signals - Linux Programming BlogBattula Yagna Srinath ReddyNo ratings yet
- OS Linux Signals OCT 17Document24 pagesOS Linux Signals OCT 17vivekNo ratings yet
- Chapter05 TCP Client Server ExampleDocument54 pagesChapter05 TCP Client Server ExampleSarma JonnabhattarNo ratings yet
- UNIX SignalsDocument89 pagesUNIX SignalsSantu PaulNo ratings yet
- Sigaction: by Prithiviraj.MDocument12 pagesSigaction: by Prithiviraj.MEbinKThomasNo ratings yet
- UNIT II Application Development: TCP Echo ServerDocument38 pagesUNIT II Application Development: TCP Echo ServerSundariNo ratings yet
- Linux SignalsDocument22 pagesLinux SignalsNaveen YanamaddiNo ratings yet
- Signal Handling in Linux: Tushar B. KuteDocument27 pagesSignal Handling in Linux: Tushar B. Kuteutkarsh130896No ratings yet
- C Signal HandlingDocument9 pagesC Signal HandlingAnonymous gUjimJKNo ratings yet
- Exception Handling: Chapter SixDocument21 pagesException Handling: Chapter Sixjanasira1No ratings yet
- Interprocess Communication MechanismsDocument12 pagesInterprocess Communication MechanismsAnjana DeviNo ratings yet
- Introduction To Signals: Operating System LabDocument5 pagesIntroduction To Signals: Operating System LabSikandar KhanNo ratings yet
- 4 SignalsDocument13 pages4 SignalsTechie 5879No ratings yet
- II UnitDocument21 pagesII Unitsuganya004No ratings yet
- Cheatsheet Signal A4Document1 pageCheatsheet Signal A4Buland Kumar SinghNo ratings yet
- Cours 05 SignalsDocument115 pagesCours 05 SignalsSai Venkat GudlaNo ratings yet
- Unit 6Document36 pagesUnit 6VAMSI KRISHNA KURAPATINo ratings yet
- Kernel Chintech Notes3Document51 pagesKernel Chintech Notes3Rishad SoofiNo ratings yet
- Signals: Signals Can Be Numbered From 0 To 31Document3 pagesSignals: Signals Can Be Numbered From 0 To 31Idhigo AguggsNo ratings yet
- Lab 3: Basic C Signals and Sockets ICMP/PING, and TracerouteDocument7 pagesLab 3: Basic C Signals and Sockets ICMP/PING, and TracerouteInf EtherealNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- QuizDocument13 pagesQuizVamsinath JavangulaNo ratings yet
- Constructor and DestructorsDocument47 pagesConstructor and DestructorsVamsinath JavangulaNo ratings yet
- Object Oriented Analysis and Design GRAND TEST SET1Document1 pageObject Oriented Analysis and Design GRAND TEST SET1Vamsinath JavangulaNo ratings yet
- Moving From C To C++Document29 pagesMoving From C To C++Vamsinath JavangulaNo ratings yet
- C++ Interview QuestionsDocument9 pagesC++ Interview QuestionsVamsinath JavangulaNo ratings yet
- 15A05301 Database Management SystemsDocument1 page15A05301 Database Management SystemsVamsinath JavangulaNo ratings yet
- UNIT-1 InsDocument45 pagesUNIT-1 InsVamsinath JavangulaNo ratings yet
- Bits For Mid2Document14 pagesBits For Mid2Vamsinath JavangulaNo ratings yet
- Aneka Cloud PlatformDocument31 pagesAneka Cloud PlatformVamsinath Javangula0% (1)
- Bits For Mid1Document14 pagesBits For Mid1Vamsinath Javangula100% (1)
- ANOVA MCQ With Answer PDFDocument37 pagesANOVA MCQ With Answer PDFVamsinath Javangula100% (1)
- Tips On Science and TechnologyDocument1 pageTips On Science and TechnologyVamsinath JavangulaNo ratings yet
- 355 33 Powerpoint-Slides Chapter6 (XML)Document36 pages355 33 Powerpoint-Slides Chapter6 (XML)Vamsinath JavangulaNo ratings yet
- Junior Inter Civics Model Papers: Gê¡Ä Æ$ A™Èlåð) Lçüæý M Ë Ìz Æý Ýl$ M ° A Mýsæý ×æë$?Document1 pageJunior Inter Civics Model Papers: Gê¡Ä Æ$ A™Èlåð) Lçüæý M Ë Ìz Æý Ýl$ M ° A Mýsæý ×æë$?Vamsinath JavangulaNo ratings yet
- Çü먡 Ææ÷Vû√©Â°J - V°Æ´·-Ê'© ¢√Uë«U-Ø√©': - Ú≈Éπd®˝ Áç. ¶Μ«Ææ/®Ω ®√V -N-≠Æ-ߪ' -E°Æ¤-Ù'-©'Document1 pageÇü먡 Ææ÷Vû√©Â°J - V°Æ´·-Ê'© ¢√Uë«U-Ø√©': - Ú≈Éπd®˝ Áç. ¶Μ«Ææ/®Ω ®√V -N-≠Æ-ߪ' -E°Æ¤-Ù'-©'Vamsinath JavangulaNo ratings yet
- IndexDocument1 pageIndexVamsinath JavangulaNo ratings yet
- 08 02 2017 Page 1Document1 page08 02 2017 Page 1Vamsinath JavangulaNo ratings yet
- '-Å-ü¿'s¥-ûª -¶µ«®Ω-û˝- 鬮Ωu-véπ-´' -v°æ-î√®Ωéπ®Ωh..?: - -û√-∞«- - -ûª'h-© ®√-´'éπ%-≠æg -N-≠æ-ߪ' -E°æ¤-ù'-©'Document1 page'-Å-ü¿'s¥-ûª -¶µ«®Ω-û˝- 鬮Ωu-véπ-´' -v°æ-î√®Ωéπ®Ωh..?: - -û√-∞«- - -ûª'h-© ®√-´'éπ%-≠æg -N-≠æ-ߪ' -E°æ¤-ù'-©'Vamsinath JavangulaNo ratings yet
- Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ëDocument1 pageÐ) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ëVamsinath JavangulaNo ratings yet
- Insta Grid Investors OpportunityDocument14 pagesInsta Grid Investors OpportunityShawn Paul BoikeNo ratings yet
- Amasicon Trade BrochureDocument6 pagesAmasicon Trade BrochureShantanu Saha SaniNo ratings yet
- BOMDocument1 pageBOMHytech Pvt. Ltd.No ratings yet
- COPYRIGHTSDocument16 pagesCOPYRIGHTSMaui IbabaoNo ratings yet
- Cambridge O Level: Business Studies 7115/21Document21 pagesCambridge O Level: Business Studies 7115/21mariejocalouNo ratings yet
- Full Chapter Blockchain and Smart Contract Technologies For Innovative Applications 1St Edition Nour El Madhoun PDFDocument54 pagesFull Chapter Blockchain and Smart Contract Technologies For Innovative Applications 1St Edition Nour El Madhoun PDFjames.harrington239100% (4)
- Steel-Concrete Composites Beams Considering Shear Slip EffectDocument23 pagesSteel-Concrete Composites Beams Considering Shear Slip EffectAnnisa Prita MelindaNo ratings yet
- How To Conduct An OR Study?Document2 pagesHow To Conduct An OR Study?Brylle James BigorniaNo ratings yet
- CV Examples Uk StudentDocument8 pagesCV Examples Uk Studente7648d37100% (1)
- Customer Perception Towards Bharti Axa Life Insurance Co. Ltd. atDocument94 pagesCustomer Perception Towards Bharti Axa Life Insurance Co. Ltd. atShubham MishraNo ratings yet
- PM - Equipment Task ListDocument26 pagesPM - Equipment Task Listsiva prasadNo ratings yet
- MDSW TamilNadu06Document14 pagesMDSW TamilNadu06miningnova1No ratings yet
- Financial Assets Vs Real AssetsDocument2 pagesFinancial Assets Vs Real AssetsRaja Faheem ShoukatNo ratings yet
- Calculation of Emergency Lights Load: WattsDocument1 pageCalculation of Emergency Lights Load: WattsSandeep DeodharNo ratings yet
- Amendment of Information, Formal Vs SubstantialDocument2 pagesAmendment of Information, Formal Vs SubstantialNikkoCataquiz100% (3)
- Turbine Blade Shop-Block 3 BhelDocument40 pagesTurbine Blade Shop-Block 3 Bheldeepak GuptaNo ratings yet
- Niengo Outsep North Papua 5 - 06 - 07rev2Document20 pagesNiengo Outsep North Papua 5 - 06 - 07rev2Prince DenhaagNo ratings yet
- BiodiversityR PDFDocument128 pagesBiodiversityR PDFEsteban VegaNo ratings yet
- Macquarie University:: 1.) Musec SchoolDocument6 pagesMacquarie University:: 1.) Musec SchoolUtsav ShroffNo ratings yet
- Nas-1000 Ais SartDocument2 pagesNas-1000 Ais SartAntonio VellaraNo ratings yet
- D H Reid - Organic Compounds of Sulphur, Selenium, and Tellurium Vol 1-Royal Society of Chemistry (1970)Document518 pagesD H Reid - Organic Compounds of Sulphur, Selenium, and Tellurium Vol 1-Royal Society of Chemistry (1970)julianpellegrini860No ratings yet
- Inquiries and Immersion, Krg846Document33 pagesInquiries and Immersion, Krg846Hannah Louise Gutang PortilloNo ratings yet
- 8 - Correspondance UML-JAVADocument3 pages8 - Correspondance UML-JAVAoussama sfiriNo ratings yet
- Analysing Mouse and Pen Flick GesturesDocument6 pagesAnalysing Mouse and Pen Flick GesturesHarini RaoNo ratings yet
- BCG GE McKinsey MatrixDocument22 pagesBCG GE McKinsey MatrixAthmanath SR KrishnanNo ratings yet
- Pass4sure 300-135: Troubleshooting and Maintaining Cisco IP Networks (TSHOOT)Document11 pagesPass4sure 300-135: Troubleshooting and Maintaining Cisco IP Networks (TSHOOT)alizamaxNo ratings yet
- Etabloc Syt Operating InstructionsDocument50 pagesEtabloc Syt Operating InstructionsFayeez MukadamNo ratings yet
- ETM-OT - Electronic Temperature Monitor: DescriptionDocument3 pagesETM-OT - Electronic Temperature Monitor: DescriptionMKNo ratings yet











































































































Download as pdf or txt
You might also like
- Allstate/McKinsey Bates H000001010Document495 pagesAllstate/McKinsey Bates H0000010104207west59th100% (3)
- Embedded Interview QuestionsDocument62 pagesEmbedded Interview QuestionsprathapNo ratings yet
- Crash N' Burn: Writing Linux Application Fault HandlersDocument25 pagesCrash N' Burn: Writing Linux Application Fault HandlersTuxology.net100% (4)
- Oral Notes Rupesh PillaiDocument172 pagesOral Notes Rupesh PillaiRachit100% (4)
- Lab04 SignalsDocument8 pagesLab04 SignalsRavinder K SinglaNo ratings yet
- 5 Signal ProcessingDocument40 pages5 Signal Processinggayathri nathNo ratings yet
- Sleep WakeDocument7 pagesSleep WakejaiNo ratings yet
- Signals and Daemon Processes UnixDocument30 pagesSignals and Daemon Processes UnixRahul SinhaNo ratings yet
- All About Linux SignalsDocument17 pagesAll About Linux SignalsSK_shivamNo ratings yet
- Unix Module 5Document30 pagesUnix Module 5study materialNo ratings yet
- Unit4 Signals Session 2Document21 pagesUnit4 Signals Session 2Amrin MulaniNo ratings yet
- Computer Networking Notes Module 5Document19 pagesComputer Networking Notes Module 5soujanyakilaru15No ratings yet
- Network Programming Notes - SignalsDocument6 pagesNetwork Programming Notes - Signalstaleysha vuyanziNo ratings yet
- CS312 Lec 11 12Document15 pagesCS312 Lec 11 12syedbasimmehmood1No ratings yet
- Unix Programming - Module 5Document12 pagesUnix Programming - Module 5Anusha SNo ratings yet
- UNIX Programming - Module 5 SlidesDocument81 pagesUNIX Programming - Module 5 SlidesLa QuicaNo ratings yet
- SignalDocument17 pagesSignalashish_mahanaNo ratings yet
- Signals: Based On Chapter 12.5 of Text What If Something Unexpected or Unpredictable Happens?Document17 pagesSignals: Based On Chapter 12.5 of Text What If Something Unexpected or Unpredictable Happens?Navdeep JimmyNo ratings yet
- Lab 4 - SignalsDocument26 pagesLab 4 - SignalsNourhan TarekNo ratings yet
- ch6信号处理Document36 pagesch6信号处理yueli98354No ratings yet
- Linux System Programming Part 5 - Interprocess Communication (IPC)Document21 pagesLinux System Programming Part 5 - Interprocess Communication (IPC)Калоян ТотевNo ratings yet
- Signals and Daemon Processes: UNIX ProgrammingDocument17 pagesSignals and Daemon Processes: UNIX ProgrammingVarun GowdaNo ratings yet
- Signals: Chapter 8 of Robbins BookDocument41 pagesSignals: Chapter 8 of Robbins BookelemaniaqNo ratings yet
- Unit4 SignalsDocument10 pagesUnit4 SignalsAmrin MulaniNo ratings yet
- Unix LinuxDocument5 pagesUnix LinuxkrkamaNo ratings yet
- Linux SignalsDocument3 pagesLinux SignalsavadcsNo ratings yet
- Program Error Signals (The GNU C Library)Document3 pagesProgram Error Signals (The GNU C Library)SteveNo ratings yet
- C++ Signal Handling: SR - No Signal & DescriptionDocument3 pagesC++ Signal Handling: SR - No Signal & DescriptionMirha KhanNo ratings yet
- Unix SignalsDocument42 pagesUnix SignalsRahul SreedharanNo ratings yet
- Signals, Daemon, IPCHKBKuspnotes Unit6 8 160505161037Document90 pagesSignals, Daemon, IPCHKBKuspnotes Unit6 8 160505161037Varad GalgaliNo ratings yet
- Signaling &interrupts in The Operating SystemDocument10 pagesSignaling &interrupts in The Operating SystemRagmahale RohitNo ratings yet
- Signal - Microsoft LearnDocument5 pagesSignal - Microsoft LearnShakti SharmaNo ratings yet
- Signal Names and PurposeDocument3 pagesSignal Names and PurposerealxsaloNo ratings yet
- Lab 12Document17 pagesLab 12Naz MemonNo ratings yet
- FahadKhan OS Lab10Document18 pagesFahadKhan OS Lab10Furious UploadNo ratings yet
- OS LAb 10Document11 pagesOS LAb 10Furious UploadNo ratings yet
- Causes of Signal: Unix Unix-LikeDocument2 pagesCauses of Signal: Unix Unix-LikeAmen AbatemameNo ratings yet
- CS312 Lec 10Document12 pagesCS312 Lec 10syedbasimmehmood1No ratings yet
- UNIX Module 5 NotesDocument23 pagesUNIX Module 5 NoteshibariseijiNo ratings yet
- Signals ManDocument12 pagesSignals ManMiki PerezNo ratings yet
- Unix System ProgammingDocument13 pagesUnix System ProgammingShivanand ManjaragiNo ratings yet
- All About Linux Signals - Linux Programming BlogDocument20 pagesAll About Linux Signals - Linux Programming BlogBattula Yagna Srinath ReddyNo ratings yet
- OS Linux Signals OCT 17Document24 pagesOS Linux Signals OCT 17vivekNo ratings yet
- Chapter05 TCP Client Server ExampleDocument54 pagesChapter05 TCP Client Server ExampleSarma JonnabhattarNo ratings yet
- UNIX SignalsDocument89 pagesUNIX SignalsSantu PaulNo ratings yet
- Sigaction: by Prithiviraj.MDocument12 pagesSigaction: by Prithiviraj.MEbinKThomasNo ratings yet
- UNIT II Application Development: TCP Echo ServerDocument38 pagesUNIT II Application Development: TCP Echo ServerSundariNo ratings yet
- Linux SignalsDocument22 pagesLinux SignalsNaveen YanamaddiNo ratings yet
- Signal Handling in Linux: Tushar B. KuteDocument27 pagesSignal Handling in Linux: Tushar B. Kuteutkarsh130896No ratings yet
- C Signal HandlingDocument9 pagesC Signal HandlingAnonymous gUjimJKNo ratings yet
- Exception Handling: Chapter SixDocument21 pagesException Handling: Chapter Sixjanasira1No ratings yet
- Interprocess Communication MechanismsDocument12 pagesInterprocess Communication MechanismsAnjana DeviNo ratings yet
- Introduction To Signals: Operating System LabDocument5 pagesIntroduction To Signals: Operating System LabSikandar KhanNo ratings yet
- 4 SignalsDocument13 pages4 SignalsTechie 5879No ratings yet
- II UnitDocument21 pagesII Unitsuganya004No ratings yet
- Cheatsheet Signal A4Document1 pageCheatsheet Signal A4Buland Kumar SinghNo ratings yet
- Cours 05 SignalsDocument115 pagesCours 05 SignalsSai Venkat GudlaNo ratings yet
- Unit 6Document36 pagesUnit 6VAMSI KRISHNA KURAPATINo ratings yet
- Kernel Chintech Notes3Document51 pagesKernel Chintech Notes3Rishad SoofiNo ratings yet
- Signals: Signals Can Be Numbered From 0 To 31Document3 pagesSignals: Signals Can Be Numbered From 0 To 31Idhigo AguggsNo ratings yet
- Lab 3: Basic C Signals and Sockets ICMP/PING, and TracerouteDocument7 pagesLab 3: Basic C Signals and Sockets ICMP/PING, and TracerouteInf EtherealNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- QuizDocument13 pagesQuizVamsinath JavangulaNo ratings yet
- Constructor and DestructorsDocument47 pagesConstructor and DestructorsVamsinath JavangulaNo ratings yet
- Object Oriented Analysis and Design GRAND TEST SET1Document1 pageObject Oriented Analysis and Design GRAND TEST SET1Vamsinath JavangulaNo ratings yet
- Moving From C To C++Document29 pagesMoving From C To C++Vamsinath JavangulaNo ratings yet
- C++ Interview QuestionsDocument9 pagesC++ Interview QuestionsVamsinath JavangulaNo ratings yet
- 15A05301 Database Management SystemsDocument1 page15A05301 Database Management SystemsVamsinath JavangulaNo ratings yet
- UNIT-1 InsDocument45 pagesUNIT-1 InsVamsinath JavangulaNo ratings yet
- Bits For Mid2Document14 pagesBits For Mid2Vamsinath JavangulaNo ratings yet
- Aneka Cloud PlatformDocument31 pagesAneka Cloud PlatformVamsinath Javangula0% (1)
- Bits For Mid1Document14 pagesBits For Mid1Vamsinath Javangula100% (1)
- ANOVA MCQ With Answer PDFDocument37 pagesANOVA MCQ With Answer PDFVamsinath Javangula100% (1)
- Tips On Science and TechnologyDocument1 pageTips On Science and TechnologyVamsinath JavangulaNo ratings yet
- 355 33 Powerpoint-Slides Chapter6 (XML)Document36 pages355 33 Powerpoint-Slides Chapter6 (XML)Vamsinath JavangulaNo ratings yet
- Junior Inter Civics Model Papers: Gê¡Ä Æ$ A™Èlåð) Lçüæý M Ë Ìz Æý Ýl$ M ° A Mýsæý ×æë$?Document1 pageJunior Inter Civics Model Papers: Gê¡Ä Æ$ A™Èlåð) Lçüæý M Ë Ìz Æý Ýl$ M ° A Mýsæý ×æë$?Vamsinath JavangulaNo ratings yet
- Çü먡 Ææ÷Vû√©Â°J - V°Æ´·-Ê'© ¢√Uë«U-Ø√©': - Ú≈Éπd®˝ Áç. ¶Μ«Ææ/®Ω ®√V -N-≠Æ-ߪ' -E°Æ¤-Ù'-©'Document1 pageÇü먡 Ææ÷Vû√©Â°J - V°Æ´·-Ê'© ¢√Uë«U-Ø√©': - Ú≈Éπd®˝ Áç. ¶Μ«Ææ/®Ω ®√V -N-≠Æ-ߪ' -E°Æ¤-Ù'-©'Vamsinath JavangulaNo ratings yet
- IndexDocument1 pageIndexVamsinath JavangulaNo ratings yet
- 08 02 2017 Page 1Document1 page08 02 2017 Page 1Vamsinath JavangulaNo ratings yet
- '-Å-ü¿'s¥-ûª -¶µ«®Ω-û˝- 鬮Ωu-véπ-´' -v°æ-î√®Ωéπ®Ωh..?: - -û√-∞«- - -ûª'h-© ®√-´'éπ%-≠æg -N-≠æ-ߪ' -E°æ¤-ù'-©'Document1 page'-Å-ü¿'s¥-ûª -¶µ«®Ω-û˝- 鬮Ωu-véπ-´' -v°æ-î√®Ωéπ®Ωh..?: - -û√-∞«- - -ûª'h-© ®√-´'éπ%-≠æg -N-≠æ-ߪ' -E°æ¤-ù'-©'Vamsinath JavangulaNo ratings yet
- Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ëDocument1 pageÐ) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ë Ð) L ) Lå ( Ë×æ$ëVamsinath JavangulaNo ratings yet
- Insta Grid Investors OpportunityDocument14 pagesInsta Grid Investors OpportunityShawn Paul BoikeNo ratings yet
- Amasicon Trade BrochureDocument6 pagesAmasicon Trade BrochureShantanu Saha SaniNo ratings yet
- BOMDocument1 pageBOMHytech Pvt. Ltd.No ratings yet
- COPYRIGHTSDocument16 pagesCOPYRIGHTSMaui IbabaoNo ratings yet
- Cambridge O Level: Business Studies 7115/21Document21 pagesCambridge O Level: Business Studies 7115/21mariejocalouNo ratings yet
- Full Chapter Blockchain and Smart Contract Technologies For Innovative Applications 1St Edition Nour El Madhoun PDFDocument54 pagesFull Chapter Blockchain and Smart Contract Technologies For Innovative Applications 1St Edition Nour El Madhoun PDFjames.harrington239100% (4)
- Steel-Concrete Composites Beams Considering Shear Slip EffectDocument23 pagesSteel-Concrete Composites Beams Considering Shear Slip EffectAnnisa Prita MelindaNo ratings yet
- How To Conduct An OR Study?Document2 pagesHow To Conduct An OR Study?Brylle James BigorniaNo ratings yet
- CV Examples Uk StudentDocument8 pagesCV Examples Uk Studente7648d37100% (1)
- Customer Perception Towards Bharti Axa Life Insurance Co. Ltd. atDocument94 pagesCustomer Perception Towards Bharti Axa Life Insurance Co. Ltd. atShubham MishraNo ratings yet
- PM - Equipment Task ListDocument26 pagesPM - Equipment Task Listsiva prasadNo ratings yet
- MDSW TamilNadu06Document14 pagesMDSW TamilNadu06miningnova1No ratings yet
- Financial Assets Vs Real AssetsDocument2 pagesFinancial Assets Vs Real AssetsRaja Faheem ShoukatNo ratings yet
- Calculation of Emergency Lights Load: WattsDocument1 pageCalculation of Emergency Lights Load: WattsSandeep DeodharNo ratings yet
- Amendment of Information, Formal Vs SubstantialDocument2 pagesAmendment of Information, Formal Vs SubstantialNikkoCataquiz100% (3)
- Turbine Blade Shop-Block 3 BhelDocument40 pagesTurbine Blade Shop-Block 3 Bheldeepak GuptaNo ratings yet
- Niengo Outsep North Papua 5 - 06 - 07rev2Document20 pagesNiengo Outsep North Papua 5 - 06 - 07rev2Prince DenhaagNo ratings yet
- BiodiversityR PDFDocument128 pagesBiodiversityR PDFEsteban VegaNo ratings yet
- Macquarie University:: 1.) Musec SchoolDocument6 pagesMacquarie University:: 1.) Musec SchoolUtsav ShroffNo ratings yet
- Nas-1000 Ais SartDocument2 pagesNas-1000 Ais SartAntonio VellaraNo ratings yet
- D H Reid - Organic Compounds of Sulphur, Selenium, and Tellurium Vol 1-Royal Society of Chemistry (1970)Document518 pagesD H Reid - Organic Compounds of Sulphur, Selenium, and Tellurium Vol 1-Royal Society of Chemistry (1970)julianpellegrini860No ratings yet
- Inquiries and Immersion, Krg846Document33 pagesInquiries and Immersion, Krg846Hannah Louise Gutang PortilloNo ratings yet
- 8 - Correspondance UML-JAVADocument3 pages8 - Correspondance UML-JAVAoussama sfiriNo ratings yet
- Analysing Mouse and Pen Flick GesturesDocument6 pagesAnalysing Mouse and Pen Flick GesturesHarini RaoNo ratings yet
- BCG GE McKinsey MatrixDocument22 pagesBCG GE McKinsey MatrixAthmanath SR KrishnanNo ratings yet
- Pass4sure 300-135: Troubleshooting and Maintaining Cisco IP Networks (TSHOOT)Document11 pagesPass4sure 300-135: Troubleshooting and Maintaining Cisco IP Networks (TSHOOT)alizamaxNo ratings yet
- Etabloc Syt Operating InstructionsDocument50 pagesEtabloc Syt Operating InstructionsFayeez MukadamNo ratings yet
- ETM-OT - Electronic Temperature Monitor: DescriptionDocument3 pagesETM-OT - Electronic Temperature Monitor: DescriptionMKNo ratings yet