Download as pdf or txt
You might also like
- Biomechanical Behavior of The Knee Joint Using ANSYSDocument14 pagesBiomechanical Behavior of The Knee Joint Using ANSYSLuchitop Campoverde100% (1)
- 01 Development of A Shoulder Musculoskeletal Model With Scapulothoracic Joint PDFDocument6 pages01 Development of A Shoulder Musculoskeletal Model With Scapulothoracic Joint PDFAbderrazak KedadriaNo ratings yet
- MechanismDocument12 pagesMechanismGERARDO TORRES RUIZNo ratings yet
- Effects of Exoskeletal Stiffness in Parallel With The Knee On The Motion of The Human Body Center of Mass During WalkingDocument8 pagesEffects of Exoskeletal Stiffness in Parallel With The Knee On The Motion of The Human Body Center of Mass During WalkingshoaibNo ratings yet
- Ex Mental Bran Research: Spatial Control of Arm MovementsDocument5 pagesEx Mental Bran Research: Spatial Control of Arm MovementsJohn FiveNo ratings yet
- Gait and StanceDocument14 pagesGait and Stancediana1470No ratings yet
- Two-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityDocument15 pagesTwo-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityTYTNo ratings yet
- Active Hip Orthosis For Assisting The Training ofDocument13 pagesActive Hip Orthosis For Assisting The Training ofJawa AlhaffarNo ratings yet
- Adl Upper LimbDocument8 pagesAdl Upper LimbTirumala RaoNo ratings yet
- Jurnal Teknologi: Numerical Simulation of Artificical Hip Joint Movement For Western and Japanese-Style ActivitiesDocument6 pagesJurnal Teknologi: Numerical Simulation of Artificical Hip Joint Movement For Western and Japanese-Style ActivitiesAditya CandratamaNo ratings yet
- 2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerDocument6 pages2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerANSHUMAAN P BHAGATNo ratings yet
- 1991 Control Aspects of Active Above-Knee Prosthesis Popovic1991Document17 pages1991 Control Aspects of Active Above-Knee Prosthesis Popovic1991Dawit AssfawNo ratings yet
- A Novel Method For Elbow Joint Continuous Prediction Using EMG and Musculoskeletal ModelDocument6 pagesA Novel Method For Elbow Joint Continuous Prediction Using EMG and Musculoskeletal ModelWalid A. SayssoukNo ratings yet
- 1 s2.0 S1350453322000790 MainDocument8 pages1 s2.0 S1350453322000790 MainNANDHINIK 19BM059No ratings yet
- 02 - Biomechanical Analysis of Sit-To-stand Movement in Normal and Obese SubjectsDocument6 pages02 - Biomechanical Analysis of Sit-To-stand Movement in Normal and Obese SubjectsCristian HuequelefNo ratings yet
- Animation Blending ReviewDocument17 pagesAnimation Blending ReviewabidansarialiNo ratings yet
- Study of An Upper Arm Exoskeleton For Gravity Balancing and Minimization of Transmitted ForcesDocument11 pagesStudy of An Upper Arm Exoskeleton For Gravity Balancing and Minimization of Transmitted ForcesDerekNo ratings yet
- Assessing Assumptions in Kinematic Hand Models: A Review: June 2012Document9 pagesAssessing Assumptions in Kinematic Hand Models: A Review: June 2012ranitaNo ratings yet
- Research Article: Siat-Wexv2: A Wearable Exoskeleton For Reducing Lumbar Load During Lifting TasksDocument12 pagesResearch Article: Siat-Wexv2: A Wearable Exoskeleton For Reducing Lumbar Load During Lifting TasksMuthuvelan MutharasuNo ratings yet
- Kalyan - Me@kluniversity - in Srinath@kluniverisyt - in Prprasadc - Me@kluniversity - inDocument6 pagesKalyan - Me@kluniversity - in Srinath@kluniverisyt - in Prprasadc - Me@kluniversity - inSharvari PatilNo ratings yet
- FEA Draft ICSV04Document9 pagesFEA Draft ICSV04raj desaiNo ratings yet
- Division of Applied Sciences, Harvard Universily Cambridge, Massachusetts 02138 Receiwd 10 December 1979Document20 pagesDivision of Applied Sciences, Harvard Universily Cambridge, Massachusetts 02138 Receiwd 10 December 1979NinaNo ratings yet
- ABiomechanical Comparisonof Different Vertical JumpDocument10 pagesABiomechanical Comparisonof Different Vertical JumpVíctor TarínNo ratings yet
- Lecture FiveDocument11 pagesLecture FiveDiavolo RequiemNo ratings yet
- Tupling 1987 Cardan AnglesDocument6 pagesTupling 1987 Cardan Anglesdanasolav1798No ratings yet
- Gábor Barton: Irtual Rehabilitation A Focus On Movement FunctionDocument8 pagesGábor Barton: Irtual Rehabilitation A Focus On Movement FunctionFrancisco Vicent PachecoNo ratings yet
- Act A 1990Document5 pagesAct A 1990Elvedin TrakićNo ratings yet
- A Modeling Approach To Compute Modification of Net Joint Forces Caused by Coping Movements in Obstetric Brachial Plexus PalsyDocument9 pagesA Modeling Approach To Compute Modification of Net Joint Forces Caused by Coping Movements in Obstetric Brachial Plexus PalsychikaNo ratings yet
- Mechanical Design of Knee and Ankle Exoskeleton To Help Patients With Lower Limb DisabilitiesDocument12 pagesMechanical Design of Knee and Ankle Exoskeleton To Help Patients With Lower Limb Disabilitiesbetelhemterefe wondimagenihuNo ratings yet
- Jucs 17 03 0349 0376 BaldassarriDocument28 pagesJucs 17 03 0349 0376 BaldassarriGaurav UpaNo ratings yet
- Multi-Body Dynamics Modelling of Seated Human Body Under Exposure To Whole-Body VibrationDocument7 pagesMulti-Body Dynamics Modelling of Seated Human Body Under Exposure To Whole-Body Vibrationengineer86No ratings yet
- Kinematic Motion Analysis of The Human Arm During A Manipulation TaskDocument7 pagesKinematic Motion Analysis of The Human Arm During A Manipulation TaskPedro RoyuelaNavarroNo ratings yet
- Anatomy Based Modeling PDFDocument10 pagesAnatomy Based Modeling PDFK.n.TingNo ratings yet
- Helical Axes of Skeletal Knee Joint Motion During RunningDocument8 pagesHelical Axes of Skeletal Knee Joint Motion During RunningWilliam VenegasNo ratings yet
- MoveNet A Deep Neural Network For Joint Profile Prediction Across Variable Walking Speeds and SlopesDocument11 pagesMoveNet A Deep Neural Network For Joint Profile Prediction Across Variable Walking Speeds and SlopesZheng ZitongNo ratings yet
- Passive Knee Exoskeleton Using Torsion Spring For Cycling AssistanceDocument6 pagesPassive Knee Exoskeleton Using Torsion Spring For Cycling AssistanceDinuka NirmalNo ratings yet
- Mao 2012Document6 pagesMao 2012Hieu DangNo ratings yet
- Applied Sciences: Design of An Active and Passive Control System of Hand Exoskeleton For RehabilitationDocument16 pagesApplied Sciences: Design of An Active and Passive Control System of Hand Exoskeleton For RehabilitationKAREN DAYANA TRUJILLO BARRIOSNo ratings yet
- A Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelDocument11 pagesA Human-Exoskeleton Interface Utilizing Electromyography: Christian Fleischer and G Unter HommelMannanHarshaNo ratings yet
- Control of Lower Limb Exoskeleton For ElderlyDocument6 pagesControl of Lower Limb Exoskeleton For ElderlyAkim KbNo ratings yet
- S Poel Stra 2000Document13 pagesS Poel Stra 2000macNo ratings yet
- Control of Leg Movements Driven by Electrically Stimulated MusclesDocument7 pagesControl of Leg Movements Driven by Electrically Stimulated MusclesBounty JhaNo ratings yet
- 4A1 Haratian RoyaDocument11 pages4A1 Haratian RoyaSANYA KUNDRA dpsruNo ratings yet
- Biomechanics and Motor Control of Human Movement - Ch3Document37 pagesBiomechanics and Motor Control of Human Movement - Ch3guillecabezaNo ratings yet
- A Preclinical Method For Evaluating The Kinematics - 2019 - Medical EngineeringDocument7 pagesA Preclinical Method For Evaluating The Kinematics - 2019 - Medical EngineeringEzgi PelitNo ratings yet
- Kinetic Chain ArticleDocument9 pagesKinetic Chain Articler.zaczek93No ratings yet
- CODMANDocument7 pagesCODMANkaren.heredia257No ratings yet
- Dynamics and Kinematics Analysis and Simulation of Lower Extremity Power-Assisted ExoskeletonDocument12 pagesDynamics and Kinematics Analysis and Simulation of Lower Extremity Power-Assisted ExoskeletonCesar Augusto Arriaga Arriaga100% (1)
- A Biomechanical Musculoskeletal Model ofDocument16 pagesA Biomechanical Musculoskeletal Model ofHelder Anibal HerminiNo ratings yet
- A Wearable Robotic Arm With High Force-Reflection CapabilityDocument6 pagesA Wearable Robotic Arm With High Force-Reflection CapabilityVishal BorateNo ratings yet
- Application of Nonlinear Model Predictive Controller For Fes-Assisted Standing Up in ParaplegiaDocument4 pagesApplication of Nonlinear Model Predictive Controller For Fes-Assisted Standing Up in Paraplegiarufaida2No ratings yet
- 2017 Cinemática de Cadera y Tobillo en Situaciones de Lesión Del Ligamento Cruzado Anterior Sin Contacto.Document8 pages2017 Cinemática de Cadera y Tobillo en Situaciones de Lesión Del Ligamento Cruzado Anterior Sin Contacto.contact.movementsiteNo ratings yet
- Upper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceDocument4 pagesUpper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceLaura CursaruNo ratings yet
- Fuzzy Reduced Order Observer-Controller Design For Biomechanical Sit-to-Stand MovementDocument6 pagesFuzzy Reduced Order Observer-Controller Design For Biomechanical Sit-to-Stand Movementnadia.imranNo ratings yet
- BMC Musculoskeletal Disorders: Lower Extremity Joint Kinetics and Lumbar Curvature During Squat and Stoop LiftingDocument10 pagesBMC Musculoskeletal Disorders: Lower Extremity Joint Kinetics and Lumbar Curvature During Squat and Stoop LiftingGonzalo GonzalesNo ratings yet
- Souit 2016Document6 pagesSouit 2016Arun KumarNo ratings yet
- Stress Changes of Lateral Collateral Ligament at Different Knee Flexion With or Without Displaced Movements: A 3-Dimensional Finite Element AnalysisDocument5 pagesStress Changes of Lateral Collateral Ligament at Different Knee Flexion With or Without Displaced Movements: A 3-Dimensional Finite Element AnalysisastritriNo ratings yet
- Nagar She TH 2007Document6 pagesNagar She TH 2007Yazdan RastegarNo ratings yet
- Wearable Shoulder Exoskeleton With Spring-Cam Mechanism For Customizable Nonlinear Gravity CompensationDocument4 pagesWearable Shoulder Exoskeleton With Spring-Cam Mechanism For Customizable Nonlinear Gravity CompensationDerekNo ratings yet
- International Journal of Computer Graphics and Animation (IJCGA)Document2 pagesInternational Journal of Computer Graphics and Animation (IJCGA)ijcgaNo ratings yet
- International Journal of Computer Graphics and Animation (IJCGA)Document2 pagesInternational Journal of Computer Graphics and Animation (IJCGA)ijcgaNo ratings yet
- Negative Attributes of The Metaverse Based On Thematic Analysis of Movie"belle" and "Ready Player One"Document10 pagesNegative Attributes of The Metaverse Based On Thematic Analysis of Movie"belle" and "Ready Player One"ijcgaNo ratings yet
- Ijcga One Page CFPDocument2 pagesIjcga One Page CFPijcgaNo ratings yet
- International Journal of Computer Graphics and Animation (IJCGA)Document2 pagesInternational Journal of Computer Graphics and Animation (IJCGA)ijcgaNo ratings yet
- Research Paper Submission - International Journal of Computer Science & Information Technology (IJCSIT)Document2 pagesResearch Paper Submission - International Journal of Computer Science & Information Technology (IJCSIT)Anonymous Gl4IRRjzNNo ratings yet
- International Journal of Computer Graphics and Animation (IJCGA)Document2 pagesInternational Journal of Computer Graphics and Animation (IJCGA)ijcgaNo ratings yet
- International Journal of Computer Graphics and Animation (IJCGA)Document2 pagesInternational Journal of Computer Graphics and Animation (IJCGA)ijcgaNo ratings yet
- International Journal of Computer Graphics and Animation (IJCGA)Document2 pagesInternational Journal of Computer Graphics and Animation (IJCGA)ijcgaNo ratings yet
- International Journal of Computer Graphics and Animation (IJCGA)Document2 pagesInternational Journal of Computer Graphics and Animation (IJCGA)ijcgaNo ratings yet
- International Journal of Computer Graphics and Animation (IJCGA)Document2 pagesInternational Journal of Computer Graphics and Animation (IJCGA)ijcgaNo ratings yet
- Describing Data:: Frequency Tables, Frequency Distributions, and Graphic PresentationDocument21 pagesDescribing Data:: Frequency Tables, Frequency Distributions, and Graphic PresentationSyafri iNo ratings yet
- Cơ Sở Toán Học Cho Mật Mã - Huỳnh Trọng ThưaDocument34 pagesCơ Sở Toán Học Cho Mật Mã - Huỳnh Trọng ThưaHồng HuyNo ratings yet
- Hora (Wealth) Chaturthamsha (Destiny) : Ranjeeta RanjeetaDocument19 pagesHora (Wealth) Chaturthamsha (Destiny) : Ranjeeta RanjeetaUtpal KumarNo ratings yet
- s10661 023 11952 WDocument20 pagess10661 023 11952 Wn0188741wNo ratings yet
- (Typological Studies in Language 66) Maya Hickmann (Ed.), Stéphane Robert (Ed.) - Space in Languages - Linguistic Systems and Cognitive Categories-John Benjamins Publishing Company (2006)Document375 pages(Typological Studies in Language 66) Maya Hickmann (Ed.), Stéphane Robert (Ed.) - Space in Languages - Linguistic Systems and Cognitive Categories-John Benjamins Publishing Company (2006)Ge Arias100% (1)
- D Eurocode 6 Masonry Vertical ResistanceDocument8 pagesD Eurocode 6 Masonry Vertical ResistancearcasteNo ratings yet
- Nptel: Power Electronics Applications To Power Systems - Video CourseDocument2 pagesNptel: Power Electronics Applications To Power Systems - Video Courseprafful666No ratings yet
- Datastage Errors and ResolutionDocument10 pagesDatastage Errors and Resolutionnithinmamidala999No ratings yet
- Types of SpeakersDocument5 pagesTypes of SpeakersDavid PeterNo ratings yet
- Seismic Performance of Post-Tensioned Precast ConcDocument9 pagesSeismic Performance of Post-Tensioned Precast ConcAbderrahmane SaidNo ratings yet
- PreviewpdfDocument70 pagesPreviewpdfArjun RajNo ratings yet
- AE Smart Geared Prewired System Installation Manual v1 0Document20 pagesAE Smart Geared Prewired System Installation Manual v1 0ben omar HmidouNo ratings yet
- Prof. S. Raman Sankaranarayanan (SRS), Assistant Professor, MMEDocument35 pagesProf. S. Raman Sankaranarayanan (SRS), Assistant Professor, MMESanjeev SahuNo ratings yet
- Introduction To Z-Wave and OpenzwaveDocument41 pagesIntroduction To Z-Wave and OpenzwaveAdwaith SajeevNo ratings yet
- On "GSM BASED E-NOTICE BOARD"Document28 pagesOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Chapter 5 Auxiliary View - HandoutDocument25 pagesChapter 5 Auxiliary View - HandoutTeshome Bekele100% (1)
- VRLA - Operating Instruction - Engl (Incluyento S100L, Solo Inglés... )Document7 pagesVRLA - Operating Instruction - Engl (Incluyento S100L, Solo Inglés... )David MonederoNo ratings yet
- IMPORTANTE. Environment and ControversiesDocument7 pagesIMPORTANTE. Environment and ControversiesWellyngtonNo ratings yet
- Ds PC CFL Combo en 1x18 2x18w CFLDocument2 pagesDs PC CFL Combo en 1x18 2x18w CFLganeshp_eeeNo ratings yet
- AHU Single ZoneDocument2 pagesAHU Single ZoneIban GranadosNo ratings yet
- Number Sense: FactorsDocument38 pagesNumber Sense: FactorsBrian NeisesNo ratings yet
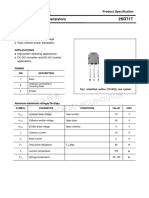
- 2SD 717 - IscDocument3 pages2SD 717 - IscStevenNo ratings yet
- Design PDFDocument202 pagesDesign PDFLorraine100% (1)
- Ordinary Differential EquationsDocument317 pagesOrdinary Differential Equationsaaa1235No ratings yet
- L13 Modelling - Relationships QDocument39 pagesL13 Modelling - Relationships Qnur aleesha izzatiNo ratings yet
- Ph-Metro Sobremesa Orion Serie Star A211Document2 pagesPh-Metro Sobremesa Orion Serie Star A211Silvana Elena Montecino San MartínNo ratings yet
- FBF Spring 2015 Inclass 4Document2 pagesFBF Spring 2015 Inclass 4peter kongNo ratings yet
- Q SolvedDocument4 pagesQ SolvedAkhilvjohnNo ratings yet
- Solution Manual For Engineering Fluid Mechanics 10th Edition by Elgerpdf PDF FreeDocument54 pagesSolution Manual For Engineering Fluid Mechanics 10th Edition by Elgerpdf PDF FreeAdriod DeNo ratings yet
- Design and Development of Automatic Wheelchair Cum Patient BedDocument90 pagesDesign and Development of Automatic Wheelchair Cum Patient BedSRL MECHNo ratings yet