Download as pdf or txt
You might also like
- Sydney Suburbs Map PDFDocument1 pageSydney Suburbs Map PDFTariq EhsanNo ratings yet
- NTRN15DA.1 (6500 R12.6 PhotonicLayerGuide) Issue1Document646 pagesNTRN15DA.1 (6500 R12.6 PhotonicLayerGuide) Issue1Tariq EhsanNo ratings yet
- NTRN15DA.3 (6500 R12.6 PhotonicLayerGuide) Issue1Document136 pagesNTRN15DA.3 (6500 R12.6 PhotonicLayerGuide) Issue1Tariq Ehsan100% (1)
- 323-1851-201.6 (6500 R14.0 Installation-T-Series Shelves) Issue1Document354 pages323-1851-201.6 (6500 R14.0 Installation-T-Series Shelves) Issue1Tariq EhsanNo ratings yet
- Broad Net MonitoringDocument10 pagesBroad Net MonitoringRidwan FauziNo ratings yet
- Artigo Do PeriodicoDocument11 pagesArtigo Do PeriodicoadrianazeredoNo ratings yet
- Deployment of Sensor Networks: Problems and Passive InspectionDocument14 pagesDeployment of Sensor Networks: Problems and Passive InspectionEhtesham AhmedNo ratings yet
- Wireless Sensor Traffic Information Collection System Based On Congestion Control AlgorithmDocument8 pagesWireless Sensor Traffic Information Collection System Based On Congestion Control AlgorithmAli ZafarNo ratings yet
- Ga-Based Dynamic Routing in WDM Optical NetworksDocument6 pagesGa-Based Dynamic Routing in WDM Optical NetworksInternational Journal of Research in Engineering and TechnologyNo ratings yet
- A Node Coordination Algorithm in Mobile WSN For Optimal Coverage (Camwoc)Document32 pagesA Node Coordination Algorithm in Mobile WSN For Optimal Coverage (Camwoc)buzzganeshNo ratings yet
- Alarms Correlation in Telecommunication Networks: Anne Bouillard, Aurore Junier, Benoit RonotDocument21 pagesAlarms Correlation in Telecommunication Networks: Anne Bouillard, Aurore Junier, Benoit RonotNawfal FarizNo ratings yet
- Fuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineDocument5 pagesFuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineJournal 4 ResearchNo ratings yet
- Optical Netw 3ndDocument8 pagesOptical Netw 3ndAnbarasan RamamoorthyNo ratings yet
- Energy-E Cient Secured Data Reduction Technique Using Image Difference Function in Wireless Video Sensor NetworksDocument19 pagesEnergy-E Cient Secured Data Reduction Technique Using Image Difference Function in Wireless Video Sensor NetworksahmedNo ratings yet
- Single-Link Failure Detection in All-Optical Networks Using Monitoring Cycles and PathsDocument3 pagesSingle-Link Failure Detection in All-Optical Networks Using Monitoring Cycles and PathsKamalsakaNo ratings yet
- Anomaly Based Intrusion Detection AlgoriDocument12 pagesAnomaly Based Intrusion Detection AlgoriIsmail MainboyNo ratings yet
- Ar2004-1107-1120 Domdouzis Anumba and ThorpeDocument11 pagesAr2004-1107-1120 Domdouzis Anumba and ThorpeUnknownNo ratings yet
- 3D Mesh Networking For IoTDocument11 pages3D Mesh Networking For IoTДжондо АнанимидзеNo ratings yet
- Proposed Techniques For Identifying Faulty Sections in Closed-Loop Distribution NetworksDocument5 pagesProposed Techniques For Identifying Faulty Sections in Closed-Loop Distribution NetworkstafseerahmedNo ratings yet
- Design and Analysis of A Flow Control Scheme Over Wireless NetworksDocument25 pagesDesign and Analysis of A Flow Control Scheme Over Wireless NetworksTung El PulgaNo ratings yet
- Mobile Ad Hoc and Sensor NetworksDocument5 pagesMobile Ad Hoc and Sensor NetworksSri harshaNo ratings yet
- Surveillance and Protection-Based Approach For Link Failures Over Fiber-To The-Home (FTTH) With Combination of ACS and SANTADDocument17 pagesSurveillance and Protection-Based Approach For Link Failures Over Fiber-To The-Home (FTTH) With Combination of ACS and SANTADYosia RayaNo ratings yet
- Design of A Packet-Based Control Framework For Networked Control SystemsDocument7 pagesDesign of A Packet-Based Control Framework For Networked Control SystemsBedadipta BainNo ratings yet
- An Efficient Link Management Algorithm For High Mobility Mesh NetworksDocument8 pagesAn Efficient Link Management Algorithm For High Mobility Mesh NetworksHarshNo ratings yet
- Real-Time Remote Fiber Monitoring SystemDocument4 pagesReal-Time Remote Fiber Monitoring SystemThorik AchsanNo ratings yet
- P E R P W S N: Erformance Valuation of Outing Rotocols in Ireless Ensor EtworksDocument10 pagesP E R P W S N: Erformance Valuation of Outing Rotocols in Ireless Ensor EtworksHazeena HaneefNo ratings yet
- Annual Reviews in Control: Dominique Sauter, Mohamed Amine Sid, Samir Aberkane, Didier MaquinDocument12 pagesAnnual Reviews in Control: Dominique Sauter, Mohamed Amine Sid, Samir Aberkane, Didier MaquinsidamineNo ratings yet
- Investigation On Monitoring System For Pantograph and Catenary Based On Condition-Based Recognition of PantographDocument11 pagesInvestigation On Monitoring System For Pantograph and Catenary Based On Condition-Based Recognition of PantographJabezNo ratings yet
- 0201753014 (1)Document554 pages0201753014 (1)Hamma SaidiNo ratings yet
- Enhanced Ids For Manet: Keywords: Wireless Networks, Manet, Intrusion Detection, AcknowledgementsDocument6 pagesEnhanced Ids For Manet: Keywords: Wireless Networks, Manet, Intrusion Detection, AcknowledgementsReddy SumanthNo ratings yet
- Passive Loss Inference in Wireless Sensor Networks Based On Network CodingDocument9 pagesPassive Loss Inference in Wireless Sensor Networks Based On Network CodingAshish BhardwajNo ratings yet
- Abstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aDocument6 pagesAbstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aVidvek InfoTechNo ratings yet
- 1 102 1 PBDocument7 pages1 102 1 PBThành Nguyễn BáNo ratings yet
- Railway Security Through The Use of Wireless Sensor Networks Based On Fuzzy LogicDocument11 pagesRailway Security Through The Use of Wireless Sensor Networks Based On Fuzzy LogicMehanathan Maggie MikeyNo ratings yet
- An Energy-Aware Qos Routing Protocol For Wireless Sensor NetworksDocument9 pagesAn Energy-Aware Qos Routing Protocol For Wireless Sensor NetworksSiddaling B AlandNo ratings yet
- IntrusionDocument3 pagesIntrusionifyNo ratings yet
- 10 1 1 149 7296 PDFDocument40 pages10 1 1 149 7296 PDFLeonardo Serna GuarínNo ratings yet
- A Study 77 PDFDocument6 pagesA Study 77 PDFVijaya LakshmiNo ratings yet
- Lifetime CommunicationDocument19 pagesLifetime CommunicationsafaahahNo ratings yet
- Building Wireless Sensor Networks: Application to Routing and Data DiffusionFrom EverandBuilding Wireless Sensor Networks: Application to Routing and Data DiffusionNo ratings yet
- P-Cycles Has Been Extensively Investigated in The Literature During The Past Decade (6) (7) .A PDocument3 pagesP-Cycles Has Been Extensively Investigated in The Literature During The Past Decade (6) (7) .A ParunbharatNo ratings yet
- Design of Multi-Rate Wlans Using Non-Linear Algorithm: Available Online atDocument2 pagesDesign of Multi-Rate Wlans Using Non-Linear Algorithm: Available Online atIJARTETNo ratings yet
- 000000da PDFDocument24 pages000000da PDFMukesh KumarNo ratings yet
- Ubiccjournalvolume2no3 5 67Document9 pagesUbiccjournalvolume2no3 5 67Ubiquitous Computing and Communication JournalNo ratings yet
- (Adrichem Et Al., 2014) OpenNetMon - Network Monitoring in OpenFlow Software-Defined NetworksDocument8 pages(Adrichem Et Al., 2014) OpenNetMon - Network Monitoring in OpenFlow Software-Defined NetworksLeandro PereiraNo ratings yet
- Opennetmon: Network Monitoring in Openflow Software-Defined NetworksDocument8 pagesOpennetmon: Network Monitoring in Openflow Software-Defined NetworksJeison ZapataNo ratings yet
- Aodv Protocol ThesisDocument4 pagesAodv Protocol ThesisSarah MarieNo ratings yet
- Robust and Energy Efficient Wireless Sensor Networks Routing AlgorithmsDocument73 pagesRobust and Energy Efficient Wireless Sensor Networks Routing Algorithms- -0% (1)
- A Taxonomy of Wireless Micro-Sensor Network Models: This Work Was Partially Supported by NSF Grant EIA-9911099Document8 pagesA Taxonomy of Wireless Micro-Sensor Network Models: This Work Was Partially Supported by NSF Grant EIA-9911099Manel MeliNo ratings yet
- Fast Steering Mirror Control Using Embedded Self Learning Fuzzy ControllerDocument14 pagesFast Steering Mirror Control Using Embedded Self Learning Fuzzy ControllerFelipeNo ratings yet
- An Algorithm For Fault Node Recovery of Wireless Sensor NetworkDocument4 pagesAn Algorithm For Fault Node Recovery of Wireless Sensor NetworkInternational Journal of Research in Engineering and TechnologyNo ratings yet
- WMM - Wireless Mesh MonitoringDocument25 pagesWMM - Wireless Mesh Monitoringtelaro25No ratings yet
- Delay Optimization: Use of Dynamic RoutingDocument8 pagesDelay Optimization: Use of Dynamic RoutingIJASCSENo ratings yet
- PolymerDocument10 pagesPolymerivorisekNo ratings yet
- Enhancement of Energy Efficiency and Throughput Using Csma CA DCF Operation For CimDocument6 pagesEnhancement of Energy Efficiency and Throughput Using Csma CA DCF Operation For CimesatjournalsNo ratings yet
- Research Article An Optimal Backoff Time-Based Internetwork Interference Mitigation Method in Wireless Body Area NetworkDocument13 pagesResearch Article An Optimal Backoff Time-Based Internetwork Interference Mitigation Method in Wireless Body Area NetworkBrahim salem NassimNo ratings yet
- Development of Smart Ground Fault Location Model For Radial Distribution SystemDocument14 pagesDevelopment of Smart Ground Fault Location Model For Radial Distribution SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Dynamic Affinity Propagation Clustering Algorithm For Cell Outage Detection in Self-Healing NetworksDocument5 pagesA Dynamic Affinity Propagation Clustering Algorithm For Cell Outage Detection in Self-Healing NetworkshardwellarminNo ratings yet
- Lightpath-Level Active Rerouting Algorithms in AllDocument6 pagesLightpath-Level Active Rerouting Algorithms in AllKashif ManzoorNo ratings yet
- Wireless Sensor Networks: Chris Guy School of Systems Engineering, University of Reading, Reading RG6 6AY, UKDocument4 pagesWireless Sensor Networks: Chris Guy School of Systems Engineering, University of Reading, Reading RG6 6AY, UKMedNo ratings yet
- Monitoring OpenFlowDocument8 pagesMonitoring OpenFlowSHNo ratings yet
- Connection Admission Grooming in PCE Based Architecture Incorporating Dynamic Fiber State Information With Combined RWADocument10 pagesConnection Admission Grooming in PCE Based Architecture Incorporating Dynamic Fiber State Information With Combined RWArajaranjayNo ratings yet
- A Game Theory Based Obstacle Avoidance Routing Protocol For Wireless Sensor NetworksDocument14 pagesA Game Theory Based Obstacle Avoidance Routing Protocol For Wireless Sensor NetworksLibotNo ratings yet
- Energy Management in Wireless Sensor NetworksFrom EverandEnergy Management in Wireless Sensor NetworksRating: 4 out of 5 stars4/5 (1)
- 323-1851-194 (6500 R14.0 CLI T-Series) Issue1Document2,398 pages323-1851-194 (6500 R14.0 CLI T-Series) Issue1Tariq EhsanNo ratings yet
- Porter Davis - Stage 26 MD Release - BrochureDocument11 pagesPorter Davis - Stage 26 MD Release - BrochureTariq EhsanNo ratings yet
- NTRN15DA.2 (6500 R12.6 PhotonicLayerGuide) Issue1Document302 pagesNTRN15DA.2 (6500 R12.6 PhotonicLayerGuide) Issue1Tariq Ehsan100% (1)
- Optical Power Debugging in DWDM System Having Fixed Gain AmplifiersDocument5 pagesOptical Power Debugging in DWDM System Having Fixed Gain AmplifiersTariq EhsanNo ratings yet
- This Document Provides Answers To Several Faqs (Frequently Asked Questions) Related To The Global Mac Support ServiceDocument4 pagesThis Document Provides Answers To Several Faqs (Frequently Asked Questions) Related To The Global Mac Support ServiceTariq EhsanNo ratings yet
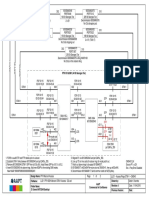
- 1500B Metro 100: Case#CA4165119 SDH Drawing - VSDDocument5 pages1500B Metro 100: Case#CA4165119 SDH Drawing - VSDTariq EhsanNo ratings yet
- 4 Service: TPG - 5167707 (300MB 6 X VC3 SNCP) EPL-0001Document3 pages4 Service: TPG - 5167707 (300MB 6 X VC3 SNCP) EPL-0001Tariq EhsanNo ratings yet
- 450-3251-201 (OneControl R5.0 OSP Installation and Configuration) 07.01Document114 pages450-3251-201 (OneControl R5.0 OSP Installation and Configuration) 07.01Tariq EhsanNo ratings yet
- AR1200 S&AR2200 S Hardware DescriptionDocument145 pagesAR1200 S&AR2200 S Hardware DescriptionTariq EhsanNo ratings yet
- G2G EssentialsPDSDocument32 pagesG2G EssentialsPDSTariq EhsanNo ratings yet
- Virtual PBX User GuideDocument43 pagesVirtual PBX User GuideTariq EhsanNo ratings yet
- SJ Ring Size GuideDocument3 pagesSJ Ring Size GuideOwen TongNo ratings yet
- Visio-Lld 1 PTH SDH Marconi Stm-1 Access - d2Document2 pagesVisio-Lld 1 PTH SDH Marconi Stm-1 Access - d2Tariq EhsanNo ratings yet
- ANZSCO List of OccupationsDocument854 pagesANZSCO List of OccupationsAmber PattersonNo ratings yet
- Security Course Brochure 1ACDocument3 pagesSecurity Course Brochure 1ACTariq EhsanNo ratings yet
- Verifying and Troubleshooting CablesDocument6 pagesVerifying and Troubleshooting CablesTariq EhsanNo ratings yet
- Arpan Karki L2C2Document56 pagesArpan Karki L2C2mrarpann22No ratings yet
- Session 4Document35 pagesSession 4Hadare IdrissouNo ratings yet
- fSCADA SPECIFICATIONDocument66 pagesfSCADA SPECIFICATIONArunTomarNo ratings yet
- DCN Record VelDocument36 pagesDCN Record VelbakkiyalakshmyNo ratings yet
- Delta Force BHD: Terrain Generator OverviewDocument12 pagesDelta Force BHD: Terrain Generator Overviewjibaro bananaNo ratings yet
- Libero Installation Licensing Setup User Guide PDFDocument46 pagesLibero Installation Licensing Setup User Guide PDFAbNo ratings yet
- Remove BatDocument1 pageRemove BatUdaya Pratap SinghNo ratings yet
- Testo 184 G1Document2 pagesTesto 184 G1Wert IndiaNo ratings yet
- Swarm IntelligenceDocument14 pagesSwarm IntelligenceAnusha KommineniNo ratings yet
- Traffic Policing: Finding Feature InformationDocument6 pagesTraffic Policing: Finding Feature InformationAmadou MbayeNo ratings yet
- Page 007Document1 pagePage 007francis earlNo ratings yet
- Para Jumbling & Passage Ordering ProblemsDocument17 pagesPara Jumbling & Passage Ordering ProblemsVenkateswara RasupalliNo ratings yet
- Cisco DNA Center Wireless Assurance Cisco DNA LIve FinalDocument19 pagesCisco DNA Center Wireless Assurance Cisco DNA LIve Finaladrian_camNo ratings yet
- Proposal For Car Rental Management SystemDocument22 pagesProposal For Car Rental Management SystemLucy WachiraNo ratings yet
- Edmodo Basics: Creating and Managing Teacher Account in EdmodoDocument73 pagesEdmodo Basics: Creating and Managing Teacher Account in Edmodowaltz crisNo ratings yet
- NHPC - Faridabad - HousekeepingDocument93 pagesNHPC - Faridabad - HousekeepingRafikul RahemanNo ratings yet
- Seminar Pill CameraDocument25 pagesSeminar Pill CameraadilppNo ratings yet
- USBDrvInstall - en - USDocument1 pageUSBDrvInstall - en - USzar niNo ratings yet
- Crystal Report 2016 Unit 1Document10 pagesCrystal Report 2016 Unit 1Ann JeeNo ratings yet
- Digital AnswersDocument5 pagesDigital AnswersSachin JunejaNo ratings yet
- ComputerDocument16 pagesComputerdeepshooters BabuNo ratings yet
- Resume For Bca StudentsDocument7 pagesResume For Bca Studentsc2qvmxnk100% (1)
- Ibps Rrb Po & Sbi Clerk Mains PDF Course 2023-1717909979246Document22 pagesIbps Rrb Po & Sbi Clerk Mains PDF Course 2023-1717909979246manoranjansapmariNo ratings yet
- C++ Lab ExercisesDocument8 pagesC++ Lab ExercisesSeravana KumarNo ratings yet
- 7 - Module 7 - Networks, Internet and Internet ProtocolDocument37 pages7 - Module 7 - Networks, Internet and Internet ProtocolJoey MetranNo ratings yet
- Affiniti 30 - SP - 452299129861 - LRDocument24 pagesAffiniti 30 - SP - 452299129861 - LRbioesdsNo ratings yet
- Principles of Information Security, Fifth Edition: Risk ManagementDocument32 pagesPrinciples of Information Security, Fifth Edition: Risk ManagementAbdiraxman Maxamed100% (1)
- Phrasal Verb PDFDocument200 pagesPhrasal Verb PDFshahzaibNo ratings yet
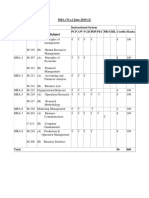
- MBA (W.e.f June 2010-11) I Year Instructional System Course Code SLM Code Name of Subject PCP Aw VGD PDP Pec Pro Iiil Credits MarksDocument70 pagesMBA (W.e.f June 2010-11) I Year Instructional System Course Code SLM Code Name of Subject PCP Aw VGD PDP Pec Pro Iiil Credits MarksalokpandeygenxNo ratings yet