Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Solution Manual 3rd Ed. Metal Forming: Mechanics and Metallurgy CHAPTER 1-3Document11 pagesSolution Manual 3rd Ed. Metal Forming: Mechanics and Metallurgy CHAPTER 1-3Nadia Zukry83% (6)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Lecture 4 Day 3 Stochastic Frontier AnalysisDocument45 pagesLecture 4 Day 3 Stochastic Frontier AnalysisSp Ina100% (4)
- Pak Studies Paper 2020Document36 pagesPak Studies Paper 2020Shan Ali Shah100% (1)
- An International Baccalaureate Education For AllDocument7 pagesAn International Baccalaureate Education For AllLorraine SabbaghNo ratings yet
- Marxist CriminologyDocument15 pagesMarxist CriminologyPerry Mag100% (1)
- ManabeDocument2 pagesManabeamin6000No ratings yet
- Sakht 90 PDFDocument5 pagesSakht 90 PDFamin6000No ratings yet
- Ian Percival, Derek Richards - Introduction To DynamicsDocument282 pagesIan Percival, Derek Richards - Introduction To Dynamicsamin60000% (1)
- Festo-ElectroHydraulics Advanced LevelDocument126 pagesFesto-ElectroHydraulics Advanced Levelamin6000No ratings yet
- Tutorial 5Document4 pagesTutorial 5Eqieyn JerrNo ratings yet
- Venturi MetersDocument2 pagesVenturi MetersBala SubrahmanyamNo ratings yet
- Concept of EntrepreneurshipDocument11 pagesConcept of EntrepreneurshipHNo ratings yet
- Navicat MacDocument1,041 pagesNavicat MacCarlos Jese Lomeli ValderrabanoNo ratings yet
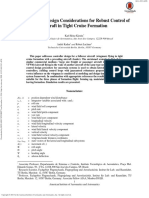
- Modeling and Design Considerations For Robust Control of Aircraft in Tight Formation FlightDocument13 pagesModeling and Design Considerations For Robust Control of Aircraft in Tight Formation FlightAeroSpatzNo ratings yet
- The Evidence of Humour in Selected Musical MaterialsDocument10 pagesThe Evidence of Humour in Selected Musical MaterialsAro OlawoleNo ratings yet
- Role of A BMDocument2 pagesRole of A BMraj singhNo ratings yet
- Sequential ImagesDocument178 pagesSequential Imagesvirginia100% (1)
- Possible Title: Mathematical Investigation: Math in Real Life Application Math Is A Beautiful Abstract Game, Worth Investigating Just For Its Own Sake. It Also Happens ToDocument3 pagesPossible Title: Mathematical Investigation: Math in Real Life Application Math Is A Beautiful Abstract Game, Worth Investigating Just For Its Own Sake. It Also Happens ToOgaban JamilNo ratings yet
- Building Maintenance StrategyDocument8 pagesBuilding Maintenance StrategyNeels Ram100% (3)
- Dialog Diabetes B.inggris Kel 5-1Document4 pagesDialog Diabetes B.inggris Kel 5-1Desma LindaNo ratings yet
- Test 6Document16 pagesTest 6Ale FigueroaNo ratings yet
- CC15 Laminar FlowDocument22 pagesCC15 Laminar Flow999impactNo ratings yet
- Malcolm X Papers SchomburgDocument49 pagesMalcolm X Papers Schomburgdrferg50% (2)
- Airconditioning DayaDocument2 pagesAirconditioning DayaMike AdvinculaNo ratings yet
- Folklore of Southeast SulawesiDocument3 pagesFolklore of Southeast SulawesiMarioNo ratings yet
- EoDocument139 pagesEoVientihAgNo ratings yet
- Industrial Training Unit Confidential: Form CDocument3 pagesIndustrial Training Unit Confidential: Form CFortnite College100% (1)
- Task1:: Check The Statements You Think Are True About About The Empire State BuildingDocument3 pagesTask1:: Check The Statements You Think Are True About About The Empire State BuildingMiro MiroNo ratings yet
- Readings in Philippine HistoryDocument6 pagesReadings in Philippine Historyjon_cyril19No ratings yet
- 5E CharacterSheet FillableDocument3 pages5E CharacterSheet FillableEmília GuimarãesNo ratings yet
- The Laud Ragamala Album Bikaner and TheDocument32 pagesThe Laud Ragamala Album Bikaner and TheAnuj PratapNo ratings yet
- Ciné TranseDocument11 pagesCiné TransePROFESSOR VISITANTE 2023No ratings yet
- Unit 3 PeDocument2 pagesUnit 3 PeJoven LocsinNo ratings yet
- Voluntary Unemployment and Involuntary UnemploymentDocument2 pagesVoluntary Unemployment and Involuntary UnemploymentRb San DiegoNo ratings yet
- Ebook Fulfilling Destiny As Demanded by GodDocument94 pagesEbook Fulfilling Destiny As Demanded by GodIfeanyi OmeiheakuNo ratings yet