
Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 12
Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 12
You might also like
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17Document26 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9mahendranNo ratings yet
- Lec4 PDFDocument19 pagesLec4 PDFAbhishek AroraNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9Document24 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9abimanaNo ratings yet
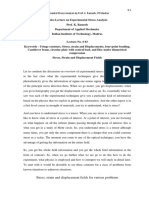
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrasDocument40 pagesExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrastamizhanNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Document19 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4abimanaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11mahendranNo ratings yet
- 3-1 Video Lecture On Experimental Stress Analysis by Prof. K. Ramesh, IIT MadrasDocument38 pages3-1 Video Lecture On Experimental Stress Analysis by Prof. K. Ramesh, IIT MadrasarravindNo ratings yet
- Direct Stiffness35Document38 pagesDirect Stiffness35N TNo ratings yet
- Lec 6Document20 pagesLec 6ዘረአዳም ዘመንቆረርNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 19Document23 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 19mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15mahendranNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6Document22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6abimanaNo ratings yet
- Operations On MatricesDocument35 pagesOperations On MatricesK SrinivasNo ratings yet
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument25 pagesEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasPranav RaveendranNo ratings yet
- Lec 7Document18 pagesLec 7Ravi KumarNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- Lec19 PDFDocument22 pagesLec19 PDFdurgaraokamireddyNo ratings yet
- Lec 20Document35 pagesLec 20MallikarjunPerumallaNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30Document26 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30abimanaNo ratings yet
- Lec 10Document24 pagesLec 10mahendranNo ratings yet
- Lec 5Document24 pagesLec 5jehadyamNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 12Document23 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 12abimanaNo ratings yet
- Lec 8Document11 pagesLec 8Ravi KumarNo ratings yet
- Matrix Method of AnalysisDocument28 pagesMatrix Method of AnalysisEvans LionNo ratings yet
- Calculus I - Related RatesDocument15 pagesCalculus I - Related Rateswag2325No ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 5Document27 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 5abimanaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8mahendranNo ratings yet
- Lec20 PDFDocument24 pagesLec20 PDFmahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 7Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 7mahendranNo ratings yet
- Lec 12Document33 pagesLec 12Arun GoyalNo ratings yet
- Lec 36Document17 pagesLec 36Pushpendra BhardwajNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14mahendranNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 2Document23 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 2abimanaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 28Document24 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 28mahendranNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument34 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasGirish ReddyNo ratings yet
- Matrix Analysis of Plane and Space Frames - Devdas MenonDocument196 pagesMatrix Analysis of Plane and Space Frames - Devdas Menonnatalia100% (1)
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument34 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madrasprince francisNo ratings yet
- Lec 102Document12 pagesLec 102KeerthiNo ratings yet
- Lec 5Document6 pagesLec 5Ravi KumarNo ratings yet
- Lecture 16 - Matrix Method of Analysis of TrussesDocument16 pagesLecture 16 - Matrix Method of Analysis of TrussesAkshayNo ratings yet
- Lec14 PDFDocument21 pagesLec14 PDFAbhishek AroraNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8Document21 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8abimanaNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- Lec 37Document12 pagesLec 37maherkamelNo ratings yet
- Lec 17Document13 pagesLec 17Sushant SheteNo ratings yet
- Advance Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument26 pagesAdvance Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasMahmoudMatarNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 33Document27 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 33Kajal KhanNo ratings yet
- Lec 24Document25 pagesLec 24tamizhanNo ratings yet
- Lec 15Document18 pagesLec 15Janaki RamanNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 24Document27 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 24mahendranNo ratings yet
- Torsionless Grillage AnalysisDocument28 pagesTorsionless Grillage AnalysisAnonymous 1HFV185Sl4No ratings yet
- NPTEL: FEM Lecture 1Document24 pagesNPTEL: FEM Lecture 1Umer FarooqNo ratings yet
- Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, MadrasDocument20 pagesAdvanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madrasammar sangeNo ratings yet
- Lec 8Document39 pagesLec 8GooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Cash Flow: S.Valai Ganesh M.E-Cad/CamDocument18 pagesCash Flow: S.Valai Ganesh M.E-Cad/CammahendranNo ratings yet
- F3 - 0517 NewDocument8 pagesF3 - 0517 NewmahendranNo ratings yet
- Static and Mobile Pressure Vessels Rules 1981Document40 pagesStatic and Mobile Pressure Vessels Rules 1981mahendran50% (2)
- Lyco 3Document4 pagesLyco 3mahendranNo ratings yet
- The Water (Prevention and Control of Pollution ACT 1974Document17 pagesThe Water (Prevention and Control of Pollution ACT 1974mahendran100% (1)
- Types of IndustriesDocument19 pagesTypes of IndustriesmahendranNo ratings yet
- Bio-Medical Waste ManagementDocument25 pagesBio-Medical Waste ManagementmahendranNo ratings yet
- Mines Act 1952Document23 pagesMines Act 1952mahendran100% (1)
- Noise PollutionDocument17 pagesNoise PollutionmahendranNo ratings yet
- Mines Act 1952Document23 pagesMines Act 1952mahendran100% (1)


































































Download as pdf or txt
You might also like
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17Document26 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9mahendranNo ratings yet
- Lec4 PDFDocument19 pagesLec4 PDFAbhishek AroraNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9Document24 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9abimanaNo ratings yet
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrasDocument40 pagesExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrastamizhanNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Document19 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4abimanaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 4mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11mahendranNo ratings yet
- 3-1 Video Lecture On Experimental Stress Analysis by Prof. K. Ramesh, IIT MadrasDocument38 pages3-1 Video Lecture On Experimental Stress Analysis by Prof. K. Ramesh, IIT MadrasarravindNo ratings yet
- Direct Stiffness35Document38 pagesDirect Stiffness35N TNo ratings yet
- Lec 6Document20 pagesLec 6ዘረአዳም ዘመንቆረርNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 19Document23 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 19mahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15mahendranNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6Document22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 6abimanaNo ratings yet
- Operations On MatricesDocument35 pagesOperations On MatricesK SrinivasNo ratings yet
- Engineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument25 pagesEngineering Fracture Mechanics Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasPranav RaveendranNo ratings yet
- Lec 7Document18 pagesLec 7Ravi KumarNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- Lec19 PDFDocument22 pagesLec19 PDFdurgaraokamireddyNo ratings yet
- Lec 20Document35 pagesLec 20MallikarjunPerumallaNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30Document26 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 30abimanaNo ratings yet
- Lec 10Document24 pagesLec 10mahendranNo ratings yet
- Lec 5Document24 pagesLec 5jehadyamNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 12Document23 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 12abimanaNo ratings yet
- Lec 8Document11 pagesLec 8Ravi KumarNo ratings yet
- Matrix Method of AnalysisDocument28 pagesMatrix Method of AnalysisEvans LionNo ratings yet
- Calculus I - Related RatesDocument15 pagesCalculus I - Related Rateswag2325No ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 5Document27 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 5abimanaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8mahendranNo ratings yet
- Lec20 PDFDocument24 pagesLec20 PDFmahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 7Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 7mahendranNo ratings yet
- Lec 12Document33 pagesLec 12Arun GoyalNo ratings yet
- Lec 36Document17 pagesLec 36Pushpendra BhardwajNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14mahendranNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 2Document23 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 2abimanaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 28Document24 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 28mahendranNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument34 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasGirish ReddyNo ratings yet
- Matrix Analysis of Plane and Space Frames - Devdas MenonDocument196 pagesMatrix Analysis of Plane and Space Frames - Devdas Menonnatalia100% (1)
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument34 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madrasprince francisNo ratings yet
- Lec 102Document12 pagesLec 102KeerthiNo ratings yet
- Lec 5Document6 pagesLec 5Ravi KumarNo ratings yet
- Lecture 16 - Matrix Method of Analysis of TrussesDocument16 pagesLecture 16 - Matrix Method of Analysis of TrussesAkshayNo ratings yet
- Lec14 PDFDocument21 pagesLec14 PDFAbhishek AroraNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8Document21 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 8abimanaNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- Lec 37Document12 pagesLec 37maherkamelNo ratings yet
- Lec 17Document13 pagesLec 17Sushant SheteNo ratings yet
- Advance Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument26 pagesAdvance Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasMahmoudMatarNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 33Document27 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 33Kajal KhanNo ratings yet
- Lec 24Document25 pagesLec 24tamizhanNo ratings yet
- Lec 15Document18 pagesLec 15Janaki RamanNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 24Document27 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 24mahendranNo ratings yet
- Torsionless Grillage AnalysisDocument28 pagesTorsionless Grillage AnalysisAnonymous 1HFV185Sl4No ratings yet
- NPTEL: FEM Lecture 1Document24 pagesNPTEL: FEM Lecture 1Umer FarooqNo ratings yet
- Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, MadrasDocument20 pagesAdvanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madrasammar sangeNo ratings yet
- Lec 8Document39 pagesLec 8GooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Cash Flow: S.Valai Ganesh M.E-Cad/CamDocument18 pagesCash Flow: S.Valai Ganesh M.E-Cad/CammahendranNo ratings yet
- F3 - 0517 NewDocument8 pagesF3 - 0517 NewmahendranNo ratings yet
- Static and Mobile Pressure Vessels Rules 1981Document40 pagesStatic and Mobile Pressure Vessels Rules 1981mahendran50% (2)
- Lyco 3Document4 pagesLyco 3mahendranNo ratings yet
- The Water (Prevention and Control of Pollution ACT 1974Document17 pagesThe Water (Prevention and Control of Pollution ACT 1974mahendran100% (1)
- Types of IndustriesDocument19 pagesTypes of IndustriesmahendranNo ratings yet
- Bio-Medical Waste ManagementDocument25 pagesBio-Medical Waste ManagementmahendranNo ratings yet
- Mines Act 1952Document23 pagesMines Act 1952mahendran100% (1)
- Noise PollutionDocument17 pagesNoise PollutionmahendranNo ratings yet
- Mines Act 1952Document23 pagesMines Act 1952mahendran100% (1)