Download as docx, pdf, or txt
You might also like
- Iec 62271-200Document108 pagesIec 62271-200FOG100% (1)
- El Repl Manual 20130218Document436 pagesEl Repl Manual 20130218ricky100% (6)
- Troubleshooting: LunarDocument54 pagesTroubleshooting: Lunarsmm100% (1)
- Im 6 PDFDocument12 pagesIm 6 PDFmaheswaranNo ratings yet
- 00908a - Using The DsPIC30F For Vector Control of An ACIMDocument76 pages00908a - Using The DsPIC30F For Vector Control of An ACIMJandfor Tansfg ErrottNo ratings yet
- Industrial Drives: Presentation On Vector Control of AC Induction MotorsDocument4 pagesIndustrial Drives: Presentation On Vector Control of AC Induction MotorsSaravana Perumal KrishnasamyNo ratings yet
- Speed Control of Induction Motor Using FOC MethodDocument5 pagesSpeed Control of Induction Motor Using FOC MethodYugendran KumaravelNo ratings yet
- Vector Control (Motor)Document7 pagesVector Control (Motor)Tarak BenslimaneNo ratings yet
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDocument6 pagesInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNo ratings yet
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDocument12 pagesDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandNo ratings yet
- Sensorless Field Oriented Control Using An 8-Bit MicrocontrollerDocument3 pagesSensorless Field Oriented Control Using An 8-Bit MicrocontrollerasASasASNo ratings yet
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDocument7 pagesA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNo ratings yet
- Vector Control of AC Motor Drive For Active Damping of Output Using Passive Filter ResonanceDocument6 pagesVector Control of AC Motor Drive For Active Damping of Output Using Passive Filter ResonanceijaertNo ratings yet
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- ECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction MotorsDocument61 pagesECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction MotorsVikas PatelNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Vector Control (Motor)Document7 pagesVector Control (Motor)Mainak DeyNo ratings yet
- Implementing Field Oriented Control of A Brushless DC MotorDocument10 pagesImplementing Field Oriented Control of A Brushless DC MotorPhạm Văn TưởngNo ratings yet
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Vector Control of Induction Motors: Click To Edit Master Subtitle StyleDocument23 pagesVector Control of Induction Motors: Click To Edit Master Subtitle StyleSruthi SubramanianNo ratings yet
- Sensorless Field Oriented Control (FOC) of An AC Inductive MotorDocument34 pagesSensorless Field Oriented Control (FOC) of An AC Inductive MotorpaaraibNo ratings yet
- New Direct Torque Control Scheme of Induction Motor For Electric VehiclesDocument7 pagesNew Direct Torque Control Scheme of Induction Motor For Electric VehiclesPrasanth RamavarapuNo ratings yet
- VectorDocument56 pagesVectorTI IgnitorsNo ratings yet
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulNo ratings yet
- H09344550 PDFDocument6 pagesH09344550 PDFkavyaNo ratings yet
- Motor DrivesDocument61 pagesMotor DrivesSatesh NairNo ratings yet
- 1 Field Oriented Control of Induction Motor 12/6/2015Document36 pages1 Field Oriented Control of Induction Motor 12/6/2015Belal Ashraf100% (1)
- ECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction Topic 13: Vector Control of AC Induction MotorsDocument61 pagesECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction Topic 13: Vector Control of AC Induction MotorsLijo JacobNo ratings yet
- Ijaiem 2013 08 25 054Document11 pagesIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Permanent Magnet Synchronous Motor ControlDocument3 pagesPermanent Magnet Synchronous Motor ControlMarcin KowalskiNo ratings yet
- Induction Motor.Document6 pagesInduction Motor.Kiran KumarNo ratings yet
- DavidDocument25 pagesDavidgtchsekharNo ratings yet
- PrinciplesDocument5 pagesPrinciplesSachin RohillaNo ratings yet
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocument7 pagesDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452Document4 pagesDesign and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452lajosmol100% (1)
- Speed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationDocument6 pagesSpeed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationPrabhat KarnNo ratings yet
- Direct Torque Control InductionDocument9 pagesDirect Torque Control InductiononafetsNo ratings yet
- Sensorless FOC of ACIDocument43 pagesSensorless FOC of ACIdimitaringNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- CMP0193 SynopsisDocument6 pagesCMP0193 Synopsissumiths32No ratings yet
- Implementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGADocument7 pagesImplementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGABharati RajaNo ratings yet
- 2Document6 pages2Sairam SaiNo ratings yet
- Simulation by Composite ModelDocument8 pagesSimulation by Composite Modelanshgarg786No ratings yet
- NNS Notes ServomotorDocument9 pagesNNS Notes ServomotorNarendra SinhaNo ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- 10.1.1.168.3186Document8 pages10.1.1.168.3186bijalmehtaNo ratings yet
- Seminar ReportDocument29 pagesSeminar ReportSamhita Vishnu0% (2)
- Speed Control of DC MotorDocument48 pagesSpeed Control of DC MotorVivek VickyNo ratings yet
- 2015.11 - Speed Control of A Three Phase Induction Motor Using Field Oriented ControlDocument9 pages2015.11 - Speed Control of A Three Phase Induction Motor Using Field Oriented ControlamrrefkyNo ratings yet
- Adaptive Backstepping Control of Separately Excited DC Motor With UncertaintiesDocument6 pagesAdaptive Backstepping Control of Separately Excited DC Motor With UncertaintiesEngr XamirNo ratings yet
- Design and Implementation of Flux Vector PDFDocument15 pagesDesign and Implementation of Flux Vector PDFBelal AshrafNo ratings yet
- Indirect Vector Control of Induction MotorDocument5 pagesIndirect Vector Control of Induction MotorCharlotte ReynoldsNo ratings yet
- Handbook of Ac Servo SystemsDocument41 pagesHandbook of Ac Servo SystemsJoas Alvarez PizarroNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Mtpi2000C - 40 KW (Range) : Technical DescriptionDocument6 pagesMtpi2000C - 40 KW (Range) : Technical DescriptionMohammad KilaniNo ratings yet
- Sony-XMSD22X Caramp PDFDocument24 pagesSony-XMSD22X Caramp PDFAdriano de la CruzNo ratings yet
- Siemen HJD63B400Document4 pagesSiemen HJD63B400ap00No ratings yet
- Best Practice For Sweep Frequency Response AnalysisDocument44 pagesBest Practice For Sweep Frequency Response AnalysisRabah Amer100% (1)
- Tra Dong CoDocument257 pagesTra Dong CoĐào Văn HảiDHCD13A3HNNo ratings yet
- Ir 2151Document6 pagesIr 2151RintheGreatNo ratings yet
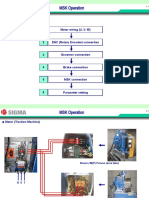
- 02 - MSK OperationDocument12 pages02 - MSK OperationMoises PerelloNo ratings yet
- SD6834 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage MosfetDocument10 pagesSD6834 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage Mosfetحسین مشعلNo ratings yet
- Fastmig Sf52 Sf53 Om enDocument22 pagesFastmig Sf52 Sf53 Om enMarijan LesičakNo ratings yet
- Sistema Electrico FH W170-170PL-190Document54 pagesSistema Electrico FH W170-170PL-190David Solis100% (1)
- Power Electronics by D.W.Hart Chapter 04Document12 pagesPower Electronics by D.W.Hart Chapter 04Syed AfzalNo ratings yet
- Magnetic Pickup Test: Testing and AdjustingDocument3 pagesMagnetic Pickup Test: Testing and AdjustingRichard ChuaNo ratings yet
- Spark PlugDocument8 pagesSpark PlugRafaell DalpraNo ratings yet
- Three-Phase Induction Motor Tests: Technical ReportDocument10 pagesThree-Phase Induction Motor Tests: Technical ReportPrashant PuriNo ratings yet
- Instructions DNL - WHS.20500 Rev01Document5 pagesInstructions DNL - WHS.20500 Rev01leonardo.adnNo ratings yet
- BCC VFD Panel Drawing R0Document29 pagesBCC VFD Panel Drawing R0gonzaraggiNo ratings yet
- Technical Manual SIMPLY HP - ING - Sez.0 - IndexDocument2 pagesTechnical Manual SIMPLY HP - ING - Sez.0 - Indexfortroni0% (1)
- Sony KLV-40X300A KLV-40X350A 46X 52X CH FIX2 LCDDocument73 pagesSony KLV-40X300A KLV-40X350A 46X 52X CH FIX2 LCDkostelectronics switzerlandNo ratings yet
- Load SchedDocument1 pageLoad SchedNikko Catibog GutierrezNo ratings yet
- Si720x Switch/Latch Hall Effect Magnetic Position Sensor Data SheetDocument32 pagesSi720x Switch/Latch Hall Effect Magnetic Position Sensor Data Sheetvlade naumovskiNo ratings yet
- 1-5/8" CELLFLEX Premium Attenuation Low-Loss Foam-Dielectric Coaxial CableDocument2 pages1-5/8" CELLFLEX Premium Attenuation Low-Loss Foam-Dielectric Coaxial CableMateus LucasNo ratings yet
- Litar-Litar Kenderaan (Simulator)Document8 pagesLitar-Litar Kenderaan (Simulator)Fakhrul Helmi MieNo ratings yet
- Varta TSP Brochure.....Document2 pagesVarta TSP Brochure.....Usman140No ratings yet
- Keyence Proximity Sersors Ez-Ev Series PDFDocument12 pagesKeyence Proximity Sersors Ez-Ev Series PDFdanielNo ratings yet
- Lighting Design Basics and TerminologyDocument22 pagesLighting Design Basics and TerminologyTonoTony100% (1)
- Ingecon Sun 160 TLDocument4 pagesIngecon Sun 160 TLAlen ŽarkovićNo ratings yet
- 03 220 66 KV Xmer On Line Nifes r5 No QR Jun 11Document86 pages03 220 66 KV Xmer On Line Nifes r5 No QR Jun 11kvramanan_1No ratings yet