
Fundamental Principles For Vehicle/Occupant Systems Analysis
Fundamental Principles For Vehicle/Occupant Systems Analysis
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- CASINO by Nicholas PileggiDocument238 pagesCASINO by Nicholas PileggiPutipufNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sofitel Philippine Plaza Manila Cultural Orientations FrameworkDocument3 pagesSofitel Philippine Plaza Manila Cultural Orientations FrameworkApril Jane EvangelistaNo ratings yet
- Control Charts - Which Control Chart Should You UseDocument4 pagesControl Charts - Which Control Chart Should You UseRohit SoniNo ratings yet
- Strategic ManagementDocument37 pagesStrategic ManagementreezmanNo ratings yet
- 1st Quarter Exam in Math9Document3 pages1st Quarter Exam in Math9Robert Jay Mejorada100% (4)
- Mfx2550 Field Engineering ManualDocument415 pagesMfx2550 Field Engineering ManualJoeNo ratings yet
- 18 AAA ReferenceDocument1,006 pages18 AAA ReferenceOMCRNo ratings yet
- Guide To Supply Chain Management RemediationV2Document26 pagesGuide To Supply Chain Management RemediationV2Andrada-DianaFilipciucNo ratings yet
- Asset To LiabDocument25 pagesAsset To LiabHavanaNo ratings yet
- Form o - Quality AssuranceDocument93 pagesForm o - Quality AssuranceonutocsNo ratings yet
- Marquipt Mounting Systems FR SS LadDocument2 pagesMarquipt Mounting Systems FR SS LadAyhan ÇalışkanNo ratings yet
- AIS (Automatic Identification System) WorkingDocument8 pagesAIS (Automatic Identification System) Workingkhanjamil1250% (2)
- ENGG 325 - Electric Circuits and Systems Midterm ExaminationDocument9 pagesENGG 325 - Electric Circuits and Systems Midterm ExaminationTaha EtemNo ratings yet
- Sic Mos Trench SJ Micromachines-13-01770-V2Document12 pagesSic Mos Trench SJ Micromachines-13-01770-V2terry chenNo ratings yet
- HITO 2004 Annual ReportDocument15 pagesHITO 2004 Annual ReportHITONo ratings yet
- CAPENTRAINDocument2 pagesCAPENTRAINMedrar TareqNo ratings yet
- 4 - 20140515034803 - 1 Coase, R.H. 1937 The Nature of The FirmDocument24 pages4 - 20140515034803 - 1 Coase, R.H. 1937 The Nature of The FirmFelicia AprilianiNo ratings yet
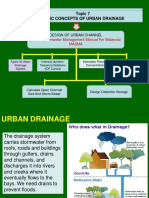
- Topic 7 Basic Concepts of Urban Drainage: (Urban Stormwater Management Manual For Malaysia) MasmaDocument29 pagesTopic 7 Basic Concepts of Urban Drainage: (Urban Stormwater Management Manual For Malaysia) MasmaAzhar SabriNo ratings yet
- People vs. JaysonDocument5 pagesPeople vs. JaysonnathNo ratings yet
- 15 To 21 OctoberDocument16 pages15 To 21 OctoberpratidinNo ratings yet
- Light and Geometric OpticsDocument53 pagesLight and Geometric OpticsLeah May Tamayo ManayonNo ratings yet
- Technical SubmittalDocument121 pagesTechnical SubmittalSyed Sabir Ahmed100% (1)
- Lymphoproliferative DisordersDocument36 pagesLymphoproliferative DisordersBrett FieldsNo ratings yet
- Adib - Haghighatjoo - Orchestration Project - Prelude - 4Document8 pagesAdib - Haghighatjoo - Orchestration Project - Prelude - 4Adib HaghighatjooNo ratings yet
- Optiplex-9020-Desktop - Setup Guide - En-UsDocument9 pagesOptiplex-9020-Desktop - Setup Guide - En-UsElectra-com idNo ratings yet
- Monumentalizing Identities North SyrianDocument637 pagesMonumentalizing Identities North Syrianarheo111No ratings yet
- Week 1: Learning Activity 1 Short Quiz 1Document39 pagesWeek 1: Learning Activity 1 Short Quiz 1yagami100% (1)
- Antenna GsDocument108 pagesAntenna GsGody100% (2)
- Laboratory Diagnosis of Cerebrospinal Fluid: MM Cajucom MicrobiologyDocument21 pagesLaboratory Diagnosis of Cerebrospinal Fluid: MM Cajucom Microbiologymarc cajucomNo ratings yet
- Portable Boring MachineDocument2 pagesPortable Boring Machinesexmanijak100% (1)





































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- CASINO by Nicholas PileggiDocument238 pagesCASINO by Nicholas PileggiPutipufNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sofitel Philippine Plaza Manila Cultural Orientations FrameworkDocument3 pagesSofitel Philippine Plaza Manila Cultural Orientations FrameworkApril Jane EvangelistaNo ratings yet
- Control Charts - Which Control Chart Should You UseDocument4 pagesControl Charts - Which Control Chart Should You UseRohit SoniNo ratings yet
- Strategic ManagementDocument37 pagesStrategic ManagementreezmanNo ratings yet
- 1st Quarter Exam in Math9Document3 pages1st Quarter Exam in Math9Robert Jay Mejorada100% (4)
- Mfx2550 Field Engineering ManualDocument415 pagesMfx2550 Field Engineering ManualJoeNo ratings yet
- 18 AAA ReferenceDocument1,006 pages18 AAA ReferenceOMCRNo ratings yet
- Guide To Supply Chain Management RemediationV2Document26 pagesGuide To Supply Chain Management RemediationV2Andrada-DianaFilipciucNo ratings yet
- Asset To LiabDocument25 pagesAsset To LiabHavanaNo ratings yet
- Form o - Quality AssuranceDocument93 pagesForm o - Quality AssuranceonutocsNo ratings yet
- Marquipt Mounting Systems FR SS LadDocument2 pagesMarquipt Mounting Systems FR SS LadAyhan ÇalışkanNo ratings yet
- AIS (Automatic Identification System) WorkingDocument8 pagesAIS (Automatic Identification System) Workingkhanjamil1250% (2)
- ENGG 325 - Electric Circuits and Systems Midterm ExaminationDocument9 pagesENGG 325 - Electric Circuits and Systems Midterm ExaminationTaha EtemNo ratings yet
- Sic Mos Trench SJ Micromachines-13-01770-V2Document12 pagesSic Mos Trench SJ Micromachines-13-01770-V2terry chenNo ratings yet
- HITO 2004 Annual ReportDocument15 pagesHITO 2004 Annual ReportHITONo ratings yet
- CAPENTRAINDocument2 pagesCAPENTRAINMedrar TareqNo ratings yet
- 4 - 20140515034803 - 1 Coase, R.H. 1937 The Nature of The FirmDocument24 pages4 - 20140515034803 - 1 Coase, R.H. 1937 The Nature of The FirmFelicia AprilianiNo ratings yet
- Topic 7 Basic Concepts of Urban Drainage: (Urban Stormwater Management Manual For Malaysia) MasmaDocument29 pagesTopic 7 Basic Concepts of Urban Drainage: (Urban Stormwater Management Manual For Malaysia) MasmaAzhar SabriNo ratings yet
- People vs. JaysonDocument5 pagesPeople vs. JaysonnathNo ratings yet
- 15 To 21 OctoberDocument16 pages15 To 21 OctoberpratidinNo ratings yet
- Light and Geometric OpticsDocument53 pagesLight and Geometric OpticsLeah May Tamayo ManayonNo ratings yet
- Technical SubmittalDocument121 pagesTechnical SubmittalSyed Sabir Ahmed100% (1)
- Lymphoproliferative DisordersDocument36 pagesLymphoproliferative DisordersBrett FieldsNo ratings yet
- Adib - Haghighatjoo - Orchestration Project - Prelude - 4Document8 pagesAdib - Haghighatjoo - Orchestration Project - Prelude - 4Adib HaghighatjooNo ratings yet
- Optiplex-9020-Desktop - Setup Guide - En-UsDocument9 pagesOptiplex-9020-Desktop - Setup Guide - En-UsElectra-com idNo ratings yet
- Monumentalizing Identities North SyrianDocument637 pagesMonumentalizing Identities North Syrianarheo111No ratings yet
- Week 1: Learning Activity 1 Short Quiz 1Document39 pagesWeek 1: Learning Activity 1 Short Quiz 1yagami100% (1)
- Antenna GsDocument108 pagesAntenna GsGody100% (2)
- Laboratory Diagnosis of Cerebrospinal Fluid: MM Cajucom MicrobiologyDocument21 pagesLaboratory Diagnosis of Cerebrospinal Fluid: MM Cajucom Microbiologymarc cajucomNo ratings yet
- Portable Boring MachineDocument2 pagesPortable Boring Machinesexmanijak100% (1)