
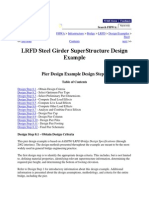
Design Guidelines For Steel Trapezoidal Box Girder Systems PDF
Design Guidelines For Steel Trapezoidal Box Girder Systems PDF
You might also like
- TUF-2000M User Manual - Google Docs DeutschDocument80 pagesTUF-2000M User Manual - Google Docs DeutschClaudia MathisNo ratings yet
- Roulette Pro V1. 2Document3 pagesRoulette Pro V1. 2george3scentNo ratings yet
- Strengthening of Existing Composite Beams Using LRFD ProceduresDocument8 pagesStrengthening of Existing Composite Beams Using LRFD Proceduresalbertoxina100% (3)
- International Workshop Bridges Integral Abutments LTU-TR-0614-SEDocument157 pagesInternational Workshop Bridges Integral Abutments LTU-TR-0614-SEJc WongNo ratings yet
- Inverted T Bent Cap Design ExampleDocument88 pagesInverted T Bent Cap Design ExampletedfdfeNo ratings yet
- Boe (Boiler Operation Engineering) Questions and Answers For All Stats Board - AskpowerplantDocument32 pagesBoe (Boiler Operation Engineering) Questions and Answers For All Stats Board - AskpowerplantRaju MaityNo ratings yet
- OLF 070 Rev2Document159 pagesOLF 070 Rev2megavolt1No ratings yet
- Cable Supported Bridges: Concept and DesignFrom EverandCable Supported Bridges: Concept and DesignRating: 5 out of 5 stars5/5 (1)
- 2007 NZSEE - Priesteley. Calvi, Kowalski-Direct Displacement-Based Seismic Design of StructuresDocument23 pages2007 NZSEE - Priesteley. Calvi, Kowalski-Direct Displacement-Based Seismic Design of StructuresIlie Cristian TiberiusNo ratings yet
- PDF Compression, Ocr, Web-Optimization With Cvision'S PdfcompressorDocument5 pagesPDF Compression, Ocr, Web-Optimization With Cvision'S Pdfcompressorpn0% (1)
- Network Tied Arch Bridges: Deepthi VDocument31 pagesNetwork Tied Arch Bridges: Deepthi VSafalsha BabuNo ratings yet
- 3 EC4-2 Background Gerhard HanswilleDocument67 pages3 EC4-2 Background Gerhard Hanswilleantonio111aNo ratings yet
- Composite Beam DesignDocument33 pagesComposite Beam DesignihpeterNo ratings yet
- Bearing Design PDFDocument33 pagesBearing Design PDFsoroware100% (1)
- Caltrans-Bridge Design Practice Feb 2015Document54 pagesCaltrans-Bridge Design Practice Feb 2015Zain Saeed100% (1)
- NCHRP RPT Integral Steel Box)Document98 pagesNCHRP RPT Integral Steel Box)Hanseung KoNo ratings yet
- EC 2 Prestressed Members Considering The Temperature PDFDocument192 pagesEC 2 Prestressed Members Considering The Temperature PDFSaroj BhattaraiNo ratings yet
- Bridge Design Box BeamDocument166 pagesBridge Design Box BeamcaradascaNo ratings yet
- Gilbert-Time-Dependent Stiffness of Cracked Reinforced & Composite Concrete SlabsDocument16 pagesGilbert-Time-Dependent Stiffness of Cracked Reinforced & Composite Concrete SlabsjausingchiNo ratings yet
- Suspension Bridge Construction Over Irtysh River, KazakhstanDocument10 pagesSuspension Bridge Construction Over Irtysh River, KazakhstanHye Yeon KimNo ratings yet
- Tedds Engineering Library (US)Document80 pagesTedds Engineering Library (US)Mallesh NenkatNo ratings yet
- CIVL311 - CIVL911 - 2020 - Week 2 - Analysis and Design of Beams For Serviceability - 1Document75 pagesCIVL311 - CIVL911 - 2020 - Week 2 - Analysis and Design of Beams For Serviceability - 1Mohammad Touhidul HaqueNo ratings yet
- Design and Construction of Concrete Filled Steel Tubular Arch Bridge PDFDocument7 pagesDesign and Construction of Concrete Filled Steel Tubular Arch Bridge PDFnishantsky1990No ratings yet
- 1 2 3 Design Performance Requirements For Rail Bridges in en 1990 Annex A2Document12 pages1 2 3 Design Performance Requirements For Rail Bridges in en 1990 Annex A2Dave ThompsonNo ratings yet
- FEA Theory Problem 1Document2 pagesFEA Theory Problem 1has960No ratings yet
- EC4-lateral Torsional BucklingDocument6 pagesEC4-lateral Torsional BucklingDaniele Dominic ColluraNo ratings yet
- Mac Alloy Post Tensioning - Macalloy 1030 - Nov 2011Document12 pagesMac Alloy Post Tensioning - Macalloy 1030 - Nov 2011Karl FarrugiaNo ratings yet
- Structural ManualDocument438 pagesStructural Manualjuho jungNo ratings yet
- Broadmeadow Estuary Bridge: Integration of Design and ConstructionDocument27 pagesBroadmeadow Estuary Bridge: Integration of Design and ConstructionRavi GuptaNo ratings yet
- Large-Scale Testing of Steel Reinforced Concrete (SRC) Coupling BeamsDocument21 pagesLarge-Scale Testing of Steel Reinforced Concrete (SRC) Coupling BeamsMREFAATNo ratings yet
- Issues of Vibrations in Footbridges by Mahesh TandonDocument17 pagesIssues of Vibrations in Footbridges by Mahesh TandonAnonymous YHcvra8Xw6No ratings yet
- Transverse Post-Tensioning Design and Detailing of Precast Prestressed Concrete Adjacent-Box-Girder Bridges PDFDocument15 pagesTransverse Post-Tensioning Design and Detailing of Precast Prestressed Concrete Adjacent-Box-Girder Bridges PDFSanti CheewabantherngNo ratings yet
- Strut and Tie Models ACIDocument13 pagesStrut and Tie Models ACIRômulo Menck RomanichenNo ratings yet
- Structural Bridge Design Example Manual - New Zealand & AustraliaDocument388 pagesStructural Bridge Design Example Manual - New Zealand & AustraliaEric Villenas0% (1)
- EN1994 4 HanswilleDocument73 pagesEN1994 4 Hanswilleoluomo1No ratings yet
- AP-R617-20 Bridge Assessment Beyond The AS5100 Deterministic Methodology PDFDocument306 pagesAP-R617-20 Bridge Assessment Beyond The AS5100 Deterministic Methodology PDFRolex11No ratings yet
- Qk1v7mgk Seismic Design and Retrofit of Bridges PriestlyDocument6 pagesQk1v7mgk Seismic Design and Retrofit of Bridges PriestlyMMaulanaNo ratings yet
- Shear As 5100 5 MedianPier PierCapDocument6 pagesShear As 5100 5 MedianPier PierCapSharyn PolleyNo ratings yet
- An Optimization Model For The Design of Network Arch BridgesDocument13 pagesAn Optimization Model For The Design of Network Arch BridgesAshutoshAparajNo ratings yet
- PC Cable-Stayed Bridge Part I PDFDocument28 pagesPC Cable-Stayed Bridge Part I PDFEncik BadrulNo ratings yet
- 2020 Fdot Load Rating ManualDocument62 pages2020 Fdot Load Rating Manualcolintb150% (2)
- PCI Adjacent Box Beam Bridges 4-21-09Document99 pagesPCI Adjacent Box Beam Bridges 4-21-09ras_deep100% (3)
- Austroads Bridge Design Code - Progress Report: R. Wedgwood, Be, Mengsc, MieaustDocument12 pagesAustroads Bridge Design Code - Progress Report: R. Wedgwood, Be, Mengsc, MieaustGAluffiNo ratings yet
- Redesign of Pedestrian Bridge at Kaneshie Market, Accra-GhanaDocument97 pagesRedesign of Pedestrian Bridge at Kaneshie Market, Accra-GhanaGagbe semanu kwameNo ratings yet
- Alberta Infrastructure Bridge AestheticsDocument70 pagesAlberta Infrastructure Bridge AestheticsShikhar SinghNo ratings yet
- Structural Design IIIDocument2 pagesStructural Design IIIpandeshantanuNo ratings yet
- Spliced Girder BridgeDocument15 pagesSpliced Girder BridgePartha Pratim RoyNo ratings yet
- DS Rebar Splicing HBDocument64 pagesDS Rebar Splicing HBdarkchechoNo ratings yet
- Bridge TechnologyDocument67 pagesBridge Technologythanzawtun1981No ratings yet
- Composite Truss BridgesDocument6 pagesComposite Truss Bridgeszepedro_fernandes100% (1)
- Precast Prestressed Concrete Short Span BridgesDocument41 pagesPrecast Prestressed Concrete Short Span Bridgescdestudos100% (1)
- Fatigue - Steel BridgesDocument12 pagesFatigue - Steel Bridgesimde2No ratings yet
- Upgrading of Railway Bridge at Woll I Creek SydneyDocument14 pagesUpgrading of Railway Bridge at Woll I Creek SydneyAndrew PetryszakNo ratings yet
- Analysis and Design of Arch-Type Pedestrian BridgeDocument18 pagesAnalysis and Design of Arch-Type Pedestrian BridgeJenrry Montan VizaNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Bridging the Strait: The Story of The Confederation Bridge ProjectFrom EverandBridging the Strait: The Story of The Confederation Bridge ProjectRating: 5 out of 5 stars5/5 (2)
- Exploring Buckling and Post-Buckling Behavior of Incompressible Hyperelastic Beams Through Innovative Experimental and Computational ApproachesDocument21 pagesExploring Buckling and Post-Buckling Behavior of Incompressible Hyperelastic Beams Through Innovative Experimental and Computational ApproachesGogyNo ratings yet
- Ventilated Green Facades As A Passive Design StrategyDocument16 pagesVentilated Green Facades As A Passive Design StrategyGogyNo ratings yet
- Investigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueDocument19 pagesInvestigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueGogyNo ratings yet
- Sensitivity Analysis of Design Parameter of I-Girder and Deck SystemDocument7 pagesSensitivity Analysis of Design Parameter of I-Girder and Deck SystemGogyNo ratings yet
- Finite Element Analysis and Structure Optimization of A Gantry-Type High-Precision Machine ToolDocument22 pagesFinite Element Analysis and Structure Optimization of A Gantry-Type High-Precision Machine ToolGogyNo ratings yet
- Productivity Analysis and Associated Risks in Steel StructuresDocument18 pagesProductivity Analysis and Associated Risks in Steel StructuresGogyNo ratings yet
- Optimization of Pile Driver Frame Based On Sensitivity AnalysisDocument14 pagesOptimization of Pile Driver Frame Based On Sensitivity AnalysisGogyNo ratings yet
- Optimization of The Multi Level Spring Restrainer For Bridges by Hybrid Particle Swarm and Gravitational Search AlgorithmDocument13 pagesOptimization of The Multi Level Spring Restrainer For Bridges by Hybrid Particle Swarm and Gravitational Search AlgorithmGogyNo ratings yet
- Shapes of Energy - Active Segments of Steel BuildingDocument14 pagesShapes of Energy - Active Segments of Steel BuildingGogyNo ratings yet
- Global Sensitivity Analysis For Bridge Crane System by Surrogate ModelingDocument17 pagesGlobal Sensitivity Analysis For Bridge Crane System by Surrogate ModelingGogyNo ratings yet
- Intelligent Skin and Occupancy in The Context of Increasing Energy Efficiency in BuildingsDocument8 pagesIntelligent Skin and Occupancy in The Context of Increasing Energy Efficiency in BuildingsGogyNo ratings yet
- Considering The Moment Effect On The Bolts' Circular Distribution in The End-Plate ConnectionDocument9 pagesConsidering The Moment Effect On The Bolts' Circular Distribution in The End-Plate ConnectionGogyNo ratings yet
- Cat Hunting Optimization Algorithm: A Novel Optimization AlgorithmDocument23 pagesCat Hunting Optimization Algorithm: A Novel Optimization AlgorithmGogyNo ratings yet
- Design Optimization of Bullock Cart YokeDocument9 pagesDesign Optimization of Bullock Cart YokeGogyNo ratings yet
- Mechanical Analysis of Forged Steel Ramshorn Hook-An Experimental StudyDocument6 pagesMechanical Analysis of Forged Steel Ramshorn Hook-An Experimental StudyGogyNo ratings yet
- Failure Modes of Pumps' Mechanical Parts and Coating Solutions For Wear ProblemsDocument101 pagesFailure Modes of Pumps' Mechanical Parts and Coating Solutions For Wear ProblemsGogyNo ratings yet
- Female Musicians and DancersDocument60 pagesFemale Musicians and DancersGogyNo ratings yet
- Lifting BEAMSDocument90 pagesLifting BEAMSGogyNo ratings yet
- Contemporary Meets Old in Rehabilitating Historic BuildingsDocument13 pagesContemporary Meets Old in Rehabilitating Historic BuildingsGogyNo ratings yet
- Curvilinear Mesh AdaptationDocument15 pagesCurvilinear Mesh AdaptationGogyNo ratings yet
- Training Simulator For Acquiring Operational Skill To Operate Overhead Traveling Crane While Suppressing Load SwayDocument13 pagesTraining Simulator For Acquiring Operational Skill To Operate Overhead Traveling Crane While Suppressing Load SwayGogyNo ratings yet
- A Virtual Reality System For Training OperatorsDocument3 pagesA Virtual Reality System For Training OperatorsGogyNo ratings yet
- Rough Terrain Telescopic Boom CraneDocument4 pagesRough Terrain Telescopic Boom CraneGogyNo ratings yet
- Automatic Design Algorithms For Securing The Ground Contact Stability of Mobile CranesDocument13 pagesAutomatic Design Algorithms For Securing The Ground Contact Stability of Mobile CranesGogyNo ratings yet
- Gis - Travelling CranesDocument20 pagesGis - Travelling CranesGogyNo ratings yet
- Assessment of Virtual Reality Based Safety Training Simulator For Electric Overhead Crane OperationsDocument13 pagesAssessment of Virtual Reality Based Safety Training Simulator For Electric Overhead Crane OperationsGogyNo ratings yet
- Process Cranes ReferencesDocument62 pagesProcess Cranes ReferencesGogyNo ratings yet
- Technical Specification For Double Girder Eot Crane For CW Pump HouseDocument212 pagesTechnical Specification For Double Girder Eot Crane For CW Pump HouseGogyNo ratings yet
- Referenz Broschuere - WoerthDocument2 pagesReferenz Broschuere - WoerthGogyNo ratings yet
- Single Girder, Double Truss CranesDocument2 pagesSingle Girder, Double Truss CranesGogyNo ratings yet
- Engine & Attaching Parts (Air Cleaner, Muffler, Engine Mounts) - E32Document4 pagesEngine & Attaching Parts (Air Cleaner, Muffler, Engine Mounts) - E32Ilton RechNo ratings yet
- Debugging ToolsDocument10 pagesDebugging ToolsAquib KhanNo ratings yet
- Objects of Conditioning Are As FollowsDocument7 pagesObjects of Conditioning Are As FollowssachinnmimsNo ratings yet
- Bor MasinaDocument28 pagesBor MasinaLohon TatianaNo ratings yet
- Passive House CharacteristicsDocument4 pagesPassive House CharacteristicsjohnlprattNo ratings yet
- 4 Short ReportDocument11 pages4 Short ReportFahad AhmadNo ratings yet
- Swot of EmsDocument2 pagesSwot of EmsWaleed MorsyNo ratings yet
- Wind Tunnel InroductionDocument38 pagesWind Tunnel Inroductionmich48chinNo ratings yet
- CNC For CADCAM and Technology StudentsDocument95 pagesCNC For CADCAM and Technology Studentscaptain_jack_zzz609No ratings yet
- Oneplus Vs XiaomiDocument2 pagesOneplus Vs XiaomiZi Jin ChengNo ratings yet
- Information Technology in BusinessDocument5 pagesInformation Technology in Businesslidia zNo ratings yet
- 2850 L3u356 Practicequestions 01Document2 pages2850 L3u356 Practicequestions 01rishie1No ratings yet
- CFCPDocument2 pagesCFCPVaishnavi TekadeNo ratings yet
- MR-350 User ManualDocument7 pagesMR-350 User ManualolivierjegNo ratings yet
- Car Body ConstructionDocument30 pagesCar Body ConstructionPethurajNo ratings yet
- Instructional Design & TechnologyDocument21 pagesInstructional Design & TechnologyRuStoryHuffmanNo ratings yet
- Skinner CNA130 Syllabus Winter10Document5 pagesSkinner CNA130 Syllabus Winter10osalazardebreauxNo ratings yet
- Decanter CentrifugesDocument9 pagesDecanter CentrifugesAgnesia Afrida PasaribuNo ratings yet
- Knowledge Management in Universities in Uganda A Social PerspectiveDocument6 pagesKnowledge Management in Universities in Uganda A Social PerspectiveAlexander DeckerNo ratings yet
- Lab 1Document10 pagesLab 1DaniNo ratings yet
- Aquasystem Aerator Karistirici Brosur PDFDocument8 pagesAquasystem Aerator Karistirici Brosur PDFMariusCapraNo ratings yet
- Standard: CharteredDocument2 pagesStandard: CharteredKetan JainNo ratings yet
- Group 9 Organizational MarketDocument2 pagesGroup 9 Organizational MarketSofia NadineNo ratings yet
- Sr. No. Activity Description Responsibility: 4.0 ActivitiesDocument1 pageSr. No. Activity Description Responsibility: 4.0 ActivitiesKamal SolankiNo ratings yet
- 116DA Silicone SprayDocument8 pages116DA Silicone Spraykatiuska2015No ratings yet
- Unbrako US Product Guide PDFDocument144 pagesUnbrako US Product Guide PDFManju KNo ratings yet






















































































































Download as pdf or txt
You might also like
- TUF-2000M User Manual - Google Docs DeutschDocument80 pagesTUF-2000M User Manual - Google Docs DeutschClaudia MathisNo ratings yet
- Roulette Pro V1. 2Document3 pagesRoulette Pro V1. 2george3scentNo ratings yet
- Strengthening of Existing Composite Beams Using LRFD ProceduresDocument8 pagesStrengthening of Existing Composite Beams Using LRFD Proceduresalbertoxina100% (3)
- International Workshop Bridges Integral Abutments LTU-TR-0614-SEDocument157 pagesInternational Workshop Bridges Integral Abutments LTU-TR-0614-SEJc WongNo ratings yet
- Inverted T Bent Cap Design ExampleDocument88 pagesInverted T Bent Cap Design ExampletedfdfeNo ratings yet
- Boe (Boiler Operation Engineering) Questions and Answers For All Stats Board - AskpowerplantDocument32 pagesBoe (Boiler Operation Engineering) Questions and Answers For All Stats Board - AskpowerplantRaju MaityNo ratings yet
- OLF 070 Rev2Document159 pagesOLF 070 Rev2megavolt1No ratings yet
- Cable Supported Bridges: Concept and DesignFrom EverandCable Supported Bridges: Concept and DesignRating: 5 out of 5 stars5/5 (1)
- 2007 NZSEE - Priesteley. Calvi, Kowalski-Direct Displacement-Based Seismic Design of StructuresDocument23 pages2007 NZSEE - Priesteley. Calvi, Kowalski-Direct Displacement-Based Seismic Design of StructuresIlie Cristian TiberiusNo ratings yet
- PDF Compression, Ocr, Web-Optimization With Cvision'S PdfcompressorDocument5 pagesPDF Compression, Ocr, Web-Optimization With Cvision'S Pdfcompressorpn0% (1)
- Network Tied Arch Bridges: Deepthi VDocument31 pagesNetwork Tied Arch Bridges: Deepthi VSafalsha BabuNo ratings yet
- 3 EC4-2 Background Gerhard HanswilleDocument67 pages3 EC4-2 Background Gerhard Hanswilleantonio111aNo ratings yet
- Composite Beam DesignDocument33 pagesComposite Beam DesignihpeterNo ratings yet
- Bearing Design PDFDocument33 pagesBearing Design PDFsoroware100% (1)
- Caltrans-Bridge Design Practice Feb 2015Document54 pagesCaltrans-Bridge Design Practice Feb 2015Zain Saeed100% (1)
- NCHRP RPT Integral Steel Box)Document98 pagesNCHRP RPT Integral Steel Box)Hanseung KoNo ratings yet
- EC 2 Prestressed Members Considering The Temperature PDFDocument192 pagesEC 2 Prestressed Members Considering The Temperature PDFSaroj BhattaraiNo ratings yet
- Bridge Design Box BeamDocument166 pagesBridge Design Box BeamcaradascaNo ratings yet
- Gilbert-Time-Dependent Stiffness of Cracked Reinforced & Composite Concrete SlabsDocument16 pagesGilbert-Time-Dependent Stiffness of Cracked Reinforced & Composite Concrete SlabsjausingchiNo ratings yet
- Suspension Bridge Construction Over Irtysh River, KazakhstanDocument10 pagesSuspension Bridge Construction Over Irtysh River, KazakhstanHye Yeon KimNo ratings yet
- Tedds Engineering Library (US)Document80 pagesTedds Engineering Library (US)Mallesh NenkatNo ratings yet
- CIVL311 - CIVL911 - 2020 - Week 2 - Analysis and Design of Beams For Serviceability - 1Document75 pagesCIVL311 - CIVL911 - 2020 - Week 2 - Analysis and Design of Beams For Serviceability - 1Mohammad Touhidul HaqueNo ratings yet
- Design and Construction of Concrete Filled Steel Tubular Arch Bridge PDFDocument7 pagesDesign and Construction of Concrete Filled Steel Tubular Arch Bridge PDFnishantsky1990No ratings yet
- 1 2 3 Design Performance Requirements For Rail Bridges in en 1990 Annex A2Document12 pages1 2 3 Design Performance Requirements For Rail Bridges in en 1990 Annex A2Dave ThompsonNo ratings yet
- FEA Theory Problem 1Document2 pagesFEA Theory Problem 1has960No ratings yet
- EC4-lateral Torsional BucklingDocument6 pagesEC4-lateral Torsional BucklingDaniele Dominic ColluraNo ratings yet
- Mac Alloy Post Tensioning - Macalloy 1030 - Nov 2011Document12 pagesMac Alloy Post Tensioning - Macalloy 1030 - Nov 2011Karl FarrugiaNo ratings yet
- Structural ManualDocument438 pagesStructural Manualjuho jungNo ratings yet
- Broadmeadow Estuary Bridge: Integration of Design and ConstructionDocument27 pagesBroadmeadow Estuary Bridge: Integration of Design and ConstructionRavi GuptaNo ratings yet
- Large-Scale Testing of Steel Reinforced Concrete (SRC) Coupling BeamsDocument21 pagesLarge-Scale Testing of Steel Reinforced Concrete (SRC) Coupling BeamsMREFAATNo ratings yet
- Issues of Vibrations in Footbridges by Mahesh TandonDocument17 pagesIssues of Vibrations in Footbridges by Mahesh TandonAnonymous YHcvra8Xw6No ratings yet
- Transverse Post-Tensioning Design and Detailing of Precast Prestressed Concrete Adjacent-Box-Girder Bridges PDFDocument15 pagesTransverse Post-Tensioning Design and Detailing of Precast Prestressed Concrete Adjacent-Box-Girder Bridges PDFSanti CheewabantherngNo ratings yet
- Strut and Tie Models ACIDocument13 pagesStrut and Tie Models ACIRômulo Menck RomanichenNo ratings yet
- Structural Bridge Design Example Manual - New Zealand & AustraliaDocument388 pagesStructural Bridge Design Example Manual - New Zealand & AustraliaEric Villenas0% (1)
- EN1994 4 HanswilleDocument73 pagesEN1994 4 Hanswilleoluomo1No ratings yet
- AP-R617-20 Bridge Assessment Beyond The AS5100 Deterministic Methodology PDFDocument306 pagesAP-R617-20 Bridge Assessment Beyond The AS5100 Deterministic Methodology PDFRolex11No ratings yet
- Qk1v7mgk Seismic Design and Retrofit of Bridges PriestlyDocument6 pagesQk1v7mgk Seismic Design and Retrofit of Bridges PriestlyMMaulanaNo ratings yet
- Shear As 5100 5 MedianPier PierCapDocument6 pagesShear As 5100 5 MedianPier PierCapSharyn PolleyNo ratings yet
- An Optimization Model For The Design of Network Arch BridgesDocument13 pagesAn Optimization Model For The Design of Network Arch BridgesAshutoshAparajNo ratings yet
- PC Cable-Stayed Bridge Part I PDFDocument28 pagesPC Cable-Stayed Bridge Part I PDFEncik BadrulNo ratings yet
- 2020 Fdot Load Rating ManualDocument62 pages2020 Fdot Load Rating Manualcolintb150% (2)
- PCI Adjacent Box Beam Bridges 4-21-09Document99 pagesPCI Adjacent Box Beam Bridges 4-21-09ras_deep100% (3)
- Austroads Bridge Design Code - Progress Report: R. Wedgwood, Be, Mengsc, MieaustDocument12 pagesAustroads Bridge Design Code - Progress Report: R. Wedgwood, Be, Mengsc, MieaustGAluffiNo ratings yet
- Redesign of Pedestrian Bridge at Kaneshie Market, Accra-GhanaDocument97 pagesRedesign of Pedestrian Bridge at Kaneshie Market, Accra-GhanaGagbe semanu kwameNo ratings yet
- Alberta Infrastructure Bridge AestheticsDocument70 pagesAlberta Infrastructure Bridge AestheticsShikhar SinghNo ratings yet
- Structural Design IIIDocument2 pagesStructural Design IIIpandeshantanuNo ratings yet
- Spliced Girder BridgeDocument15 pagesSpliced Girder BridgePartha Pratim RoyNo ratings yet
- DS Rebar Splicing HBDocument64 pagesDS Rebar Splicing HBdarkchechoNo ratings yet
- Bridge TechnologyDocument67 pagesBridge Technologythanzawtun1981No ratings yet
- Composite Truss BridgesDocument6 pagesComposite Truss Bridgeszepedro_fernandes100% (1)
- Precast Prestressed Concrete Short Span BridgesDocument41 pagesPrecast Prestressed Concrete Short Span Bridgescdestudos100% (1)
- Fatigue - Steel BridgesDocument12 pagesFatigue - Steel Bridgesimde2No ratings yet
- Upgrading of Railway Bridge at Woll I Creek SydneyDocument14 pagesUpgrading of Railway Bridge at Woll I Creek SydneyAndrew PetryszakNo ratings yet
- Analysis and Design of Arch-Type Pedestrian BridgeDocument18 pagesAnalysis and Design of Arch-Type Pedestrian BridgeJenrry Montan VizaNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Bridging the Strait: The Story of The Confederation Bridge ProjectFrom EverandBridging the Strait: The Story of The Confederation Bridge ProjectRating: 5 out of 5 stars5/5 (2)
- Exploring Buckling and Post-Buckling Behavior of Incompressible Hyperelastic Beams Through Innovative Experimental and Computational ApproachesDocument21 pagesExploring Buckling and Post-Buckling Behavior of Incompressible Hyperelastic Beams Through Innovative Experimental and Computational ApproachesGogyNo ratings yet
- Ventilated Green Facades As A Passive Design StrategyDocument16 pagesVentilated Green Facades As A Passive Design StrategyGogyNo ratings yet
- Investigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueDocument19 pagesInvestigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueGogyNo ratings yet
- Sensitivity Analysis of Design Parameter of I-Girder and Deck SystemDocument7 pagesSensitivity Analysis of Design Parameter of I-Girder and Deck SystemGogyNo ratings yet
- Finite Element Analysis and Structure Optimization of A Gantry-Type High-Precision Machine ToolDocument22 pagesFinite Element Analysis and Structure Optimization of A Gantry-Type High-Precision Machine ToolGogyNo ratings yet
- Productivity Analysis and Associated Risks in Steel StructuresDocument18 pagesProductivity Analysis and Associated Risks in Steel StructuresGogyNo ratings yet
- Optimization of Pile Driver Frame Based On Sensitivity AnalysisDocument14 pagesOptimization of Pile Driver Frame Based On Sensitivity AnalysisGogyNo ratings yet
- Optimization of The Multi Level Spring Restrainer For Bridges by Hybrid Particle Swarm and Gravitational Search AlgorithmDocument13 pagesOptimization of The Multi Level Spring Restrainer For Bridges by Hybrid Particle Swarm and Gravitational Search AlgorithmGogyNo ratings yet
- Shapes of Energy - Active Segments of Steel BuildingDocument14 pagesShapes of Energy - Active Segments of Steel BuildingGogyNo ratings yet
- Global Sensitivity Analysis For Bridge Crane System by Surrogate ModelingDocument17 pagesGlobal Sensitivity Analysis For Bridge Crane System by Surrogate ModelingGogyNo ratings yet
- Intelligent Skin and Occupancy in The Context of Increasing Energy Efficiency in BuildingsDocument8 pagesIntelligent Skin and Occupancy in The Context of Increasing Energy Efficiency in BuildingsGogyNo ratings yet
- Considering The Moment Effect On The Bolts' Circular Distribution in The End-Plate ConnectionDocument9 pagesConsidering The Moment Effect On The Bolts' Circular Distribution in The End-Plate ConnectionGogyNo ratings yet
- Cat Hunting Optimization Algorithm: A Novel Optimization AlgorithmDocument23 pagesCat Hunting Optimization Algorithm: A Novel Optimization AlgorithmGogyNo ratings yet
- Design Optimization of Bullock Cart YokeDocument9 pagesDesign Optimization of Bullock Cart YokeGogyNo ratings yet
- Mechanical Analysis of Forged Steel Ramshorn Hook-An Experimental StudyDocument6 pagesMechanical Analysis of Forged Steel Ramshorn Hook-An Experimental StudyGogyNo ratings yet
- Failure Modes of Pumps' Mechanical Parts and Coating Solutions For Wear ProblemsDocument101 pagesFailure Modes of Pumps' Mechanical Parts and Coating Solutions For Wear ProblemsGogyNo ratings yet
- Female Musicians and DancersDocument60 pagesFemale Musicians and DancersGogyNo ratings yet
- Lifting BEAMSDocument90 pagesLifting BEAMSGogyNo ratings yet
- Contemporary Meets Old in Rehabilitating Historic BuildingsDocument13 pagesContemporary Meets Old in Rehabilitating Historic BuildingsGogyNo ratings yet
- Curvilinear Mesh AdaptationDocument15 pagesCurvilinear Mesh AdaptationGogyNo ratings yet
- Training Simulator For Acquiring Operational Skill To Operate Overhead Traveling Crane While Suppressing Load SwayDocument13 pagesTraining Simulator For Acquiring Operational Skill To Operate Overhead Traveling Crane While Suppressing Load SwayGogyNo ratings yet
- A Virtual Reality System For Training OperatorsDocument3 pagesA Virtual Reality System For Training OperatorsGogyNo ratings yet
- Rough Terrain Telescopic Boom CraneDocument4 pagesRough Terrain Telescopic Boom CraneGogyNo ratings yet
- Automatic Design Algorithms For Securing The Ground Contact Stability of Mobile CranesDocument13 pagesAutomatic Design Algorithms For Securing The Ground Contact Stability of Mobile CranesGogyNo ratings yet
- Gis - Travelling CranesDocument20 pagesGis - Travelling CranesGogyNo ratings yet
- Assessment of Virtual Reality Based Safety Training Simulator For Electric Overhead Crane OperationsDocument13 pagesAssessment of Virtual Reality Based Safety Training Simulator For Electric Overhead Crane OperationsGogyNo ratings yet
- Process Cranes ReferencesDocument62 pagesProcess Cranes ReferencesGogyNo ratings yet
- Technical Specification For Double Girder Eot Crane For CW Pump HouseDocument212 pagesTechnical Specification For Double Girder Eot Crane For CW Pump HouseGogyNo ratings yet
- Referenz Broschuere - WoerthDocument2 pagesReferenz Broschuere - WoerthGogyNo ratings yet
- Single Girder, Double Truss CranesDocument2 pagesSingle Girder, Double Truss CranesGogyNo ratings yet
- Engine & Attaching Parts (Air Cleaner, Muffler, Engine Mounts) - E32Document4 pagesEngine & Attaching Parts (Air Cleaner, Muffler, Engine Mounts) - E32Ilton RechNo ratings yet
- Debugging ToolsDocument10 pagesDebugging ToolsAquib KhanNo ratings yet
- Objects of Conditioning Are As FollowsDocument7 pagesObjects of Conditioning Are As FollowssachinnmimsNo ratings yet
- Bor MasinaDocument28 pagesBor MasinaLohon TatianaNo ratings yet
- Passive House CharacteristicsDocument4 pagesPassive House CharacteristicsjohnlprattNo ratings yet
- 4 Short ReportDocument11 pages4 Short ReportFahad AhmadNo ratings yet
- Swot of EmsDocument2 pagesSwot of EmsWaleed MorsyNo ratings yet
- Wind Tunnel InroductionDocument38 pagesWind Tunnel Inroductionmich48chinNo ratings yet
- CNC For CADCAM and Technology StudentsDocument95 pagesCNC For CADCAM and Technology Studentscaptain_jack_zzz609No ratings yet
- Oneplus Vs XiaomiDocument2 pagesOneplus Vs XiaomiZi Jin ChengNo ratings yet
- Information Technology in BusinessDocument5 pagesInformation Technology in Businesslidia zNo ratings yet
- 2850 L3u356 Practicequestions 01Document2 pages2850 L3u356 Practicequestions 01rishie1No ratings yet
- CFCPDocument2 pagesCFCPVaishnavi TekadeNo ratings yet
- MR-350 User ManualDocument7 pagesMR-350 User ManualolivierjegNo ratings yet
- Car Body ConstructionDocument30 pagesCar Body ConstructionPethurajNo ratings yet
- Instructional Design & TechnologyDocument21 pagesInstructional Design & TechnologyRuStoryHuffmanNo ratings yet
- Skinner CNA130 Syllabus Winter10Document5 pagesSkinner CNA130 Syllabus Winter10osalazardebreauxNo ratings yet
- Decanter CentrifugesDocument9 pagesDecanter CentrifugesAgnesia Afrida PasaribuNo ratings yet
- Knowledge Management in Universities in Uganda A Social PerspectiveDocument6 pagesKnowledge Management in Universities in Uganda A Social PerspectiveAlexander DeckerNo ratings yet
- Lab 1Document10 pagesLab 1DaniNo ratings yet
- Aquasystem Aerator Karistirici Brosur PDFDocument8 pagesAquasystem Aerator Karistirici Brosur PDFMariusCapraNo ratings yet
- Standard: CharteredDocument2 pagesStandard: CharteredKetan JainNo ratings yet
- Group 9 Organizational MarketDocument2 pagesGroup 9 Organizational MarketSofia NadineNo ratings yet
- Sr. No. Activity Description Responsibility: 4.0 ActivitiesDocument1 pageSr. No. Activity Description Responsibility: 4.0 ActivitiesKamal SolankiNo ratings yet
- 116DA Silicone SprayDocument8 pages116DA Silicone Spraykatiuska2015No ratings yet
- Unbrako US Product Guide PDFDocument144 pagesUnbrako US Product Guide PDFManju KNo ratings yet