Download as pdf or txt
You might also like
- Here's Where I Stand From CampDocument6 pagesHere's Where I Stand From Camplaramieman100% (2)
- Harmony Vol1Document274 pagesHarmony Vol1greencheese32295% (21)
- Script High School MusicalDocument28 pagesScript High School MusicalJerez Orayle100% (2)
- Every Breath You TakeDocument6 pagesEvery Breath You TakeIsabelle Gebhardt50% (2)
- Esp 8266Document2 pagesEsp 8266Hendra SondrettNo ratings yet
- Task HandleDocument20 pagesTask Handleto1 teamNo ratings yet
- Manual Adjust For RTC Clock With Arduino and 7-Segment LEDDocument21 pagesManual Adjust For RTC Clock With Arduino and 7-Segment LEDfrasekh100% (1)
- Antenna AnalyzerDocument19 pagesAntenna Analyzermarista NurdianaNo ratings yet
- Arduino MPU6050Document3 pagesArduino MPU6050Ricky PerezNo ratings yet
- Heliberto FinalDocument7 pagesHeliberto FinalAlvaro ZapataNo ratings yet
- Designproject 2 CodeDocument5 pagesDesignproject 2 Codeapi-533012799No ratings yet
- SN 24Document1 pageSN 24Funny Aqna (Funny)No ratings yet
- Proiecte ArduinoDocument46 pagesProiecte ArduinoSyad AlyNo ratings yet
- AnexeDocument5 pagesAnexemohamedNo ratings yet
- ECGDocument8 pagesECGGuna lakshmiNo ratings yet
- STM32 RC Car (Android Control Via Bluetooth)Document9 pagesSTM32 RC Car (Android Control Via Bluetooth)winNo ratings yet
- Isd Code4Document5 pagesIsd Code4Khushi AgrawalNo ratings yet
- MainDocument14 pagesMainRené Isaac Martínez OlivaNo ratings yet
- CodigoDocument1 pageCodigoJuan carlos Mamani quispeNo ratings yet
- GSM Based Stepper Motor ControlDocument3 pagesGSM Based Stepper Motor ControlAriPermanaNo ratings yet
- Main Body CodeDocument7 pagesMain Body CodeTanner DuncanNo ratings yet
- Three-Phase Motor Control With STM32F401RET6U: B L D CDocument34 pagesThree-Phase Motor Control With STM32F401RET6U: B L D Cbokic88No ratings yet
- 14 WeatherDocument11 pages14 WeatherNika KobaidzeNo ratings yet
- code giao tiep stm 32 với esp8266 điều khiển động cơDocument7 pagescode giao tiep stm 32 với esp8266 điều khiển động cơVĩnh HậuNo ratings yet
- AD9850 Waveform GeneratorDocument9 pagesAD9850 Waveform GeneratorDemixManNo ratings yet
- AGV Project Codes CompilationDocument15 pagesAGV Project Codes CompilationJhasper ManagyoNo ratings yet
- Arduino CameraDocument11 pagesArduino CameraZdeslav CvetkovicNo ratings yet
- Basis CodesDocument15 pagesBasis CodesJholo LopezNo ratings yet
- AccDocument5 pagesAccgn NiktoNo ratings yet
- Source Code For Application To Transmit Image From Ov7670 To PC Via USBDocument11 pagesSource Code For Application To Transmit Image From Ov7670 To PC Via USBedscott66No ratings yet
- Double - Dabble - 16 - Bit NBCD - Ones NBCD - Tens NBCD - Hundreds: Void Char Char Char CharDocument4 pagesDouble - Dabble - 16 - Bit NBCD - Ones NBCD - Tens NBCD - Hundreds: Void Char Char Char CharAlberto Alberti Nisi100% (1)
- Reglarea Vitezei La MCCDocument10 pagesReglarea Vitezei La MCCGaby AxlNo ratings yet
- Interface Digital and Analog I/O Devices (Arduino Interfacing)Document29 pagesInterface Digital and Analog I/O Devices (Arduino Interfacing)Raggy TannaNo ratings yet
- Colegio de San Juan de Letran - Calamba: Bo. Bucal Calamba City, LagunaDocument8 pagesColegio de San Juan de Letran - Calamba: Bo. Bucal Calamba City, LagunaELLAINE DE CLARONo ratings yet
- Get - Time : Traceability NC-functions in 840 D G-Code (DRAFT) Julio Garrido Campos (Jgarri@uvigo - Es) Vigo UniversityDocument7 pagesGet - Time : Traceability NC-functions in 840 D G-Code (DRAFT) Julio Garrido Campos (Jgarri@uvigo - Es) Vigo UniversityrionyNo ratings yet
- ZEVA_MC_Main_Firmware_ATmega16m13444Document14 pagesZEVA_MC_Main_Firmware_ATmega16m13444ajmcdowell23No ratings yet
- Praktikum V DSP Dengan Menggunakan ARM: Hariyanto (1310125026) Selvira Rahadiningrum Ramelan (1310125027)Document6 pagesPraktikum V DSP Dengan Menggunakan ARM: Hariyanto (1310125026) Selvira Rahadiningrum Ramelan (1310125027)Primaridha SaputraNo ratings yet
- Computer For ABEDocument8 pagesComputer For ABELyka Mae MancolNo ratings yet
- Lampiran 2 Listing ProgramDocument19 pagesLampiran 2 Listing ProgramMemey Lupe UNo ratings yet
- Uart PWMDocument3 pagesUart PWMSinh DũngNo ratings yet
- Sample Code RAJDocument4 pagesSample Code RAJmoskovbringerNo ratings yet
- COBADocument2 pagesCOBAAlfian PrawiragunaNo ratings yet
- Ov7670 TestDocument3 pagesOv7670 TestAhmad Arif SaktiNo ratings yet
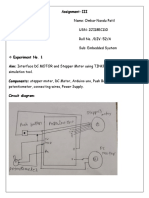
- Name: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemDocument22 pagesName: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemOMKAR PATILNo ratings yet
- Program ESC 2019Document8 pagesProgram ESC 2019Aris100% (1)
- Sketch Due Motori Ir Sensor InoDocument3 pagesSketch Due Motori Ir Sensor InoscacchiNo ratings yet
- Sketch May30aDocument2 pagesSketch May30amgx265pqzcNo ratings yet
- Main Program MonitoringDocument10 pagesMain Program MonitoringBagus NugrohoNo ratings yet
- 74hc165 x2 Daisy ChainDocument3 pages74hc165 x2 Daisy ChainAndy ZhuNo ratings yet
- Praktikum Sensor Dengan ServoDocument2 pagesPraktikum Sensor Dengan Servotkj smkn1dokoNo ratings yet
- Si5351 VFO - InoDocument6 pagesSi5351 VFO - Inoc.bhuvaneswaranNo ratings yet
- IOT Lab ExpDocument10 pagesIOT Lab Expsri kanthNo ratings yet
- Balance an inverted pendulum with a DC motorDocument4 pagesBalance an inverted pendulum with a DC motorbjaphonNo ratings yet
- Aruino db2Document6 pagesAruino db2Tiago Bortolini CunicoNo ratings yet
- Codigo Carro Arduino UnoDocument5 pagesCodigo Carro Arduino UnoBryan HernandezNo ratings yet
- STM32 ESP8266 CodeDocument6 pagesSTM32 ESP8266 CodeHow To Electronics100% (1)
- Lab 13Document11 pagesLab 13ubaidNo ratings yet
- Lab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeDocument20 pagesLab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeSikandar AliNo ratings yet
- PWMDocument2 pagesPWMSuleman SaleemNo ratings yet
- ATmega8 SHT71 Temperature Humidity and Dew Point ExampleDocument9 pagesATmega8 SHT71 Temperature Humidity and Dew Point Examplehieuhuech1No ratings yet
- ControlDocument5 pagesControlOmar AymanNo ratings yet
- Void SetupDocument29 pagesVoid SetupAlejandro RojasNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Material AudiovisualDocument150 pagesMaterial AudiovisualMary StevensonNo ratings yet
- Satellite Communications SatCom Policy of 2000Document15 pagesSatellite Communications SatCom Policy of 2000Latest Laws TeamNo ratings yet
- Great Writing Student Book 3 Unit 4Document13 pagesGreat Writing Student Book 3 Unit 4Adlina John100% (2)
- BOM RTU560 General Day1Document107 pagesBOM RTU560 General Day1Salvador FayssalNo ratings yet
- Claremont Chris Amp Lucas George Chronicles of The Shadow War 01 Shadow Moon Part01Document316 pagesClaremont Chris Amp Lucas George Chronicles of The Shadow War 01 Shadow Moon Part01Amalia OyarzúnNo ratings yet
- Air Tattva InstructionsDocument1 pageAir Tattva InstructionsARIMIDEXNo ratings yet
- Super Sync Tips V2Document53 pagesSuper Sync Tips V2albagonez100% (1)
- AMAZING GRACE CHORDS (Ver 13) by Misc Praise Songs:John Newton @Document1 pageAMAZING GRACE CHORDS (Ver 13) by Misc Praise Songs:John Newton @HannyNo ratings yet
- UKDIRDocument109 pagesUKDIRpaul .a larnerNo ratings yet
- About Our Children, October 2017Document16 pagesAbout Our Children, October 2017New Jersey Jewish StandardNo ratings yet
- Brother PT-45 User ManualDocument1 pageBrother PT-45 User Manualhelderpinto72No ratings yet
- StringSolos - v1 09-10 PDFDocument20 pagesStringSolos - v1 09-10 PDFConsuelo Froehner0% (1)
- Abel Lionel Moderns On Tragedy PDFDocument83 pagesAbel Lionel Moderns On Tragedy PDFweallus3100% (1)
- Color TV: Service ManualDocument32 pagesColor TV: Service ManualTeo DTNo ratings yet
- Chapter 24 SOLUTIONS Practice Problems PDFDocument2 pagesChapter 24 SOLUTIONS Practice Problems PDFBajeNo ratings yet
- Events in Jamaica 2014 and 2015 - Annual Jamaican EventsDocument50 pagesEvents in Jamaica 2014 and 2015 - Annual Jamaican EventsShaheer SameerNo ratings yet
- Tugas Jawab TN-F 1-100 Hal 1225-1249Document25 pagesTugas Jawab TN-F 1-100 Hal 1225-1249Anonymous jyWpsYNo ratings yet
- Sx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsDocument4 pagesSx460 Automatic Voltage Regulator (Avr) : Specification, Installation and AdjustmentsstmeuNo ratings yet
- Wave NotesDocument7 pagesWave Notesapi-422428700No ratings yet
- Chapter 15. The Operational Amplifier AbstractionDocument1 pageChapter 15. The Operational Amplifier AbstractionJokerTHNo ratings yet
- DX DiagDocument10 pagesDX DiagMikael Lintong SihombingNo ratings yet
- Spacelabs 91369 ServicioDocument130 pagesSpacelabs 91369 ServicioRaul PerezNo ratings yet
- Tejas tj1400Document4 pagesTejas tj1400SDE Tx BRMRNo ratings yet
- BP-01-UM-015 User Manual BazePort Management Studio - Publish Rev. 7 PDFDocument38 pagesBP-01-UM-015 User Manual BazePort Management Studio - Publish Rev. 7 PDFkale_cgNo ratings yet
- Bill StatementDocument98 pagesBill StatementfahadullahNo ratings yet
- Report On The Seminar Topic: Electronics and Telecommunication of University of PuneDocument34 pagesReport On The Seminar Topic: Electronics and Telecommunication of University of PuneMadhuri Mohod100% (3)