
Information Sciences: Yufeng Chen, Zhiwu Li, Kamel Barkaoui
Information Sciences: Yufeng Chen, Zhiwu Li, Kamel Barkaoui
You might also like
- Griffiths D.J. Introduction To Quantum Mechanics Solution ManualDocument184 pagesGriffiths D.J. Introduction To Quantum Mechanics Solution ManualAhmed Mahmoud83% (24)
- 1 s2.0 S002002551300532X Main PDFDocument17 pages1 s2.0 S002002551300532X Main PDFitzgayaNo ratings yet
- Conclusions and Future ResearchDocument15 pagesConclusions and Future ResearchPetrus FendiyantoNo ratings yet
- Robust Deadlock Detection and Control of Automated Manufacturing Systems With Multiple Unreliable Resources Using Petri NetsDocument13 pagesRobust Deadlock Detection and Control of Automated Manufacturing Systems With Multiple Unreliable Resources Using Petri NetssoniathalavoorNo ratings yet
- Towards Flight Control Verification Using AutomateDocument13 pagesTowards Flight Control Verification Using AutomateAlaa AyoubNo ratings yet
- Adaptive NN Fault Tolerant Control For Discrete Time Systems in Triangular Forms With Actuator Fault 2015 NeurocomputingDocument13 pagesAdaptive NN Fault Tolerant Control For Discrete Time Systems in Triangular Forms With Actuator Fault 2015 NeurocomputingAravindan MohanNo ratings yet
- A Petri Net Based Deadlock Prevention Policy For FDocument13 pagesA Petri Net Based Deadlock Prevention Policy For FsoniathalavoorNo ratings yet
- Health Monitoring of Civil Structures With Integrated UAV and Image Processing SystemDocument8 pagesHealth Monitoring of Civil Structures With Integrated UAV and Image Processing SystemRanjani VasuNo ratings yet
- Analysis and Implementation of Local Modular Supervisory Control For A Manufacturing Cell - A Case StudyDocument6 pagesAnalysis and Implementation of Local Modular Supervisory Control For A Manufacturing Cell - A Case StudyIAEME PublicationNo ratings yet
- A Survey of Fractional Order Calculus Applications of Multiple-Input, Multiple-Output (MIMO) Process ControlDocument32 pagesA Survey of Fractional Order Calculus Applications of Multiple-Input, Multiple-Output (MIMO) Process ControlS AbdNo ratings yet
- Papers Ball and PlateDocument8 pagesPapers Ball and PlateRodriNo ratings yet
- The Simulation ofDocument8 pagesThe Simulation ofYannPascalNo ratings yet
- Optimal Control of A Teleoperation System Via LMI - Based Robust PID ControllersDocument10 pagesOptimal Control of A Teleoperation System Via LMI - Based Robust PID ControllersidescitationNo ratings yet
- An Approach To Control Automated WarehouDocument19 pagesAn Approach To Control Automated WarehouIlker CetinNo ratings yet
- Aldeen IEE-CTA 1992Document10 pagesAldeen IEE-CTA 1992Abhishek RanjanNo ratings yet
- Distance-And Velocity-Based Collision Avoidance For Time-Varying Formation Control of Second-Order Multi-Agent SystemsDocument5 pagesDistance-And Velocity-Based Collision Avoidance For Time-Varying Formation Control of Second-Order Multi-Agent SystemsMy LordNo ratings yet
- Sliding Mode Methods For Fault Detection and Fault Tolerant ControlDocument12 pagesSliding Mode Methods For Fault Detection and Fault Tolerant ControljopiterNo ratings yet
- Petrinet - Tutorial PDFDocument17 pagesPetrinet - Tutorial PDFsubramanya1982No ratings yet
- PannocchiaLaachiRawlings 10373 FTPDocument12 pagesPannocchiaLaachiRawlings 10373 FTPdougmart8No ratings yet
- Articulo An Introduction To Event-Based Control For Networked Control SystemsDocument6 pagesArticulo An Introduction To Event-Based Control For Networked Control SystemsPaulina MarquezNo ratings yet
- Sliding-Mode Formation Control For Cooperative Autonomous Mobile RobotsDocument10 pagesSliding-Mode Formation Control For Cooperative Autonomous Mobile RobotsNardenioMartinsNo ratings yet
- 2 PDFDocument11 pages2 PDFMowafak HassanNo ratings yet
- Observer Design For State Variable Feedback Controller by MatlabDocument21 pagesObserver Design For State Variable Feedback Controller by MatlabDaniel Felipe Urdinila PatiñoNo ratings yet
- Blanke, M. y Frei, CDocument12 pagesBlanke, M. y Frei, CRoberto DGNo ratings yet
- Geno Fuzzy SpacecraftDocument5 pagesGeno Fuzzy SpacecraftsmedreaNo ratings yet
- 3-Degree-Of-Freedom Parallel Robot Control Based Fuzzy TheoryDocument4 pages3-Degree-Of-Freedom Parallel Robot Control Based Fuzzy TheoryLamiss HamdNo ratings yet
- Power System StabilityDocument9 pagesPower System StabilityMyScribdddNo ratings yet
- Control Engineering Practice: Ting Yang, Yili Fu, Mahdi TavakoliDocument11 pagesControl Engineering Practice: Ting Yang, Yili Fu, Mahdi Tavakolijose luis huayanay villarNo ratings yet
- A Table Lookup Scheme For Fuzzy Logic Based Model Identification Applied To Time Series PredictionDocument8 pagesA Table Lookup Scheme For Fuzzy Logic Based Model Identification Applied To Time Series PredictionArifaldy SatriadiNo ratings yet
- A3PAT, An Approach For Certified Automated Termination ProofsDocument10 pagesA3PAT, An Approach For Certified Automated Termination ProofsVictor LaszloNo ratings yet
- 400 Bad Request 400 Bad Request Nginx/1.2.9Document17 pages400 Bad Request 400 Bad Request Nginx/1.2.9Shobeir TabasiNo ratings yet
- Jin 2013Document15 pagesJin 2013Sidhant SharanNo ratings yet
- A Self-Organizing Fuzzy Controller With A Fixed Maximum Number of Rules and An Adaptive Similarity FactorDocument44 pagesA Self-Organizing Fuzzy Controller With A Fixed Maximum Number of Rules and An Adaptive Similarity FactormbxbenaNo ratings yet
- 255 - For Ubicc - 255Document6 pages255 - For Ubicc - 255Ubiquitous Computing and Communication JournalNo ratings yet
- Flatness Based Trajectory Generation For A Helicopter UAV: S. TaamallahDocument25 pagesFlatness Based Trajectory Generation For A Helicopter UAV: S. TaamallahnlrlibraryNo ratings yet
- Simulation Approach To Model Queuing Problems: December 2011Document13 pagesSimulation Approach To Model Queuing Problems: December 2011Bini YamNo ratings yet
- Introduction To Real-Time Control Using Labview With An Application To Distance LearningDocument18 pagesIntroduction To Real-Time Control Using Labview With An Application To Distance LearningMarlon José Do CarmoNo ratings yet
- Solving A Congestion Problem of Tasks in A Real-Time SystemDocument5 pagesSolving A Congestion Problem of Tasks in A Real-Time SystemJournal of ComputingNo ratings yet
- Cooperative Control of Multiple QuadrotoDocument10 pagesCooperative Control of Multiple QuadrotoTomislav SertićNo ratings yet
- Pipeline Architecture: C. V. RamamoorthyDocument42 pagesPipeline Architecture: C. V. Ramamoorthykarunya.varmaNo ratings yet
- Hardware in The Loop Simulation Underwater UnmannedDocument6 pagesHardware in The Loop Simulation Underwater UnmannedhilgadNo ratings yet
- Bicego2020 Article NonlinearModelPredictiveContro PDFDocument35 pagesBicego2020 Article NonlinearModelPredictiveContro PDFEddylson Aguilar CasquinoNo ratings yet
- A Novel Completeness Test and Its Application To Side Channel Attacks and SimulatorsDocument36 pagesA Novel Completeness Test and Its Application To Side Channel Attacks and SimulatorsANo ratings yet
- Fault Estimation For Discrete-Time Switched Nonlinear Systems With Discrete and Distributed DelaysDocument17 pagesFault Estimation For Discrete-Time Switched Nonlinear Systems With Discrete and Distributed DelaysBALASUBRAMANI MNo ratings yet
- Model-Based Performance Anticipation in Multi-Tier Autonomic Systems: Methodology and ExperimentsDocument15 pagesModel-Based Performance Anticipation in Multi-Tier Autonomic Systems: Methodology and ExperimentsTehman NiaziNo ratings yet
- On Computer Aided Control System Design. August 1999, Pages 522-527Document7 pagesOn Computer Aided Control System Design. August 1999, Pages 522-527adilsondissoNo ratings yet
- A Review of Methods For Input/output Selection: Marc Van de Wal, Bram de JagerDocument24 pagesA Review of Methods For Input/output Selection: Marc Van de Wal, Bram de JagerAjeet MishraNo ratings yet
- Iros 2016 ReplanningDocument9 pagesIros 2016 Replanningbruno.pinto.rosNo ratings yet
- Evolutionary Robot Wall-Following Control UsingDocument13 pagesEvolutionary Robot Wall-Following Control UsingFatima AhsanNo ratings yet
- Petri Net Versus Queuing Theory For Evaluation of Flexible Manufacturing SystemsDocument8 pagesPetri Net Versus Queuing Theory For Evaluation of Flexible Manufacturing SystemsShahbazKhanNo ratings yet
- WCE2010 pp1679-1685Document8 pagesWCE2010 pp1679-1685Moh IneNo ratings yet
- Pref Ace: 1. Gain Scheduling: in This Method, Typically, The Full OperatingDocument6 pagesPref Ace: 1. Gain Scheduling: in This Method, Typically, The Full OperatingBiplab SatpatiNo ratings yet
- 1.1 BackgroundDocument15 pages1.1 BackgroundPetrus FendiyantoNo ratings yet
- Tolerante A FallosDocument10 pagesTolerante A FallosDaniel SanchezNo ratings yet
- DroneDocument6 pagesDroneMarcos FernandesNo ratings yet
- Redes IndustrialesDocument11 pagesRedes IndustrialeskagantsNo ratings yet
- 00966777Document9 pages00966777arthy_mariappan3873No ratings yet
- Determinacion Del d50c PDFDocument5 pagesDeterminacion Del d50c PDFAnonymous caHv3DvtNo ratings yet
- Fuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineDocument5 pagesFuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineJournal 4 ResearchNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Appendix 1: Table A.1.1 Car Arrival and Repair DataDocument59 pagesAppendix 1: Table A.1.1 Car Arrival and Repair DataitzgayaNo ratings yet
- SCIENTIST-B of ICMR by PGIMER, ChandigarhDocument17 pagesSCIENTIST-B of ICMR by PGIMER, ChandigarhitzgayaNo ratings yet
- Sciencedirect: A. Santana, P. Afonso, A. Zanin, R. WernkeDocument8 pagesSciencedirect: A. Santana, P. Afonso, A. Zanin, R. WernkeitzgayaNo ratings yet
- An Enhanced Firefly Algorithm Approach For Solving A Flexible Job-Shop Scheduling ProblemDocument6 pagesAn Enhanced Firefly Algorithm Approach For Solving A Flexible Job-Shop Scheduling ProblemitzgayaNo ratings yet
- Molecular ResturctureDocument10 pagesMolecular ResturctureitzgayaNo ratings yet
- Advanced Approaches For Obesity and EndocrinologyDocument1 pageAdvanced Approaches For Obesity and EndocrinologyitzgayaNo ratings yet
- An Enhanced Genetic Algorithm With Simulated Annealing For Job-Shop SchedulingDocument8 pagesAn Enhanced Genetic Algorithm With Simulated Annealing For Job-Shop SchedulingitzgayaNo ratings yet
- A Hybrid Artificial Bee Colony Algorithm For Flexible Job Shop Scheduling With Worker FlexibilityDocument16 pagesA Hybrid Artificial Bee Colony Algorithm For Flexible Job Shop Scheduling With Worker FlexibilityitzgayaNo ratings yet
- Computers & Industrial Engineering: SciencedirectDocument16 pagesComputers & Industrial Engineering: SciencedirectitzgayaNo ratings yet
- A Discrete Firefly Algorithm For Solving The Flexible Job-Shop Scheduling Problem in A Make-To-Order Manufacturing SystemDocument22 pagesA Discrete Firefly Algorithm For Solving The Flexible Job-Shop Scheduling Problem in A Make-To-Order Manufacturing SystemitzgayaNo ratings yet
- A Comprehensive Survey and Future Trend ofDocument16 pagesA Comprehensive Survey and Future Trend ofitzgayaNo ratings yet
- The Classification of FMS Scheduling Problems PDFDocument10 pagesThe Classification of FMS Scheduling Problems PDFitzgayaNo ratings yet
- Summary of The Results: Scheduling FMS Using Heuristic and Search TechniquesDocument7 pagesSummary of The Results: Scheduling FMS Using Heuristic and Search TechniquesitzgayaNo ratings yet
- AGV Schedule Integrated With Production in FlexibleDocument13 pagesAGV Schedule Integrated With Production in FlexibleitzgayaNo ratings yet
- Oracle SetupsDocument26 pagesOracle SetupsDaama ChowdharyNo ratings yet
- 1CH-1 Fundamentals of PhysicsDocument29 pages1CH-1 Fundamentals of PhysicsGauravSaxenaNo ratings yet
- Construction Techniques and Equipment PracticesDocument4 pagesConstruction Techniques and Equipment PracticeskalpanaNo ratings yet
- Nordin Air Filters For TurbinesDocument12 pagesNordin Air Filters For TurbinesJorge Cuadros BlasNo ratings yet
- Lesson Plan Template 2021Document3 pagesLesson Plan Template 2021api-550991282No ratings yet
- Social, Academic, and Business Communication in The Junctures of LifeDocument2 pagesSocial, Academic, and Business Communication in The Junctures of LifeCristina RocheNo ratings yet
- Production of RubberDocument25 pagesProduction of RubberCarmel100% (1)
- Rubic Project 2 - Video AnimationDocument1 pageRubic Project 2 - Video AnimationAliana RosuriNo ratings yet
- Hydrocarbon Engineering, April 2024Document76 pagesHydrocarbon Engineering, April 2024Reyes SanchezNo ratings yet
- Lean Business CanvasDocument27 pagesLean Business CanvasSofeaNo ratings yet
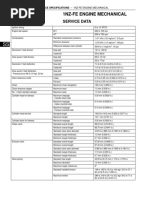
- 1Nz-Fe Engine Mechanical: Service DataDocument3 pages1Nz-Fe Engine Mechanical: Service Dataalbert phiri100% (2)
- ScalaDocument16 pagesScalaSamara SequeiraNo ratings yet
- Petroleum Geology. Log Interpretation (001-080)Document80 pagesPetroleum Geology. Log Interpretation (001-080)saedali22330044No ratings yet
- Re-Thinking Town and Country Planning Practice in ZambiaDocument11 pagesRe-Thinking Town and Country Planning Practice in ZambiaLushimba Chileya100% (1)
- An Introduction To Technical CommunicationDocument20 pagesAn Introduction To Technical Communicationmithu11100% (1)
- What Is Concrete Curing Compound?Document17 pagesWhat Is Concrete Curing Compound?SHAIK ASIMUDDIN100% (2)
- SSI SetupDocument22 pagesSSI SetupSomnath DasNo ratings yet
- Newte Bag Palletizing 2Document4 pagesNewte Bag Palletizing 2Kien Nguyen TrungNo ratings yet
- Product CAT RSTI - DatasheetDocument10 pagesProduct CAT RSTI - Datasheetman wei ngNo ratings yet
- Nota SKAA4412-Lab PDFDocument32 pagesNota SKAA4412-Lab PDFsyamsul anwarNo ratings yet
- Fox Et Al. 1 2011Document10 pagesFox Et Al. 1 2011Elena BuduroiNo ratings yet
- Datasheet PlateCatcher 2018Document4 pagesDatasheet PlateCatcher 2018Secure LifeNo ratings yet
- Radiation Emergency PlanDocument31 pagesRadiation Emergency PlanBenasher Ibrahim100% (1)
- Operating Instructions (ETC-100) : Pre-Use Inspection and Requirements For Installation FunctionsDocument1 pageOperating Instructions (ETC-100) : Pre-Use Inspection and Requirements For Installation FunctionsLewis AmundarainNo ratings yet
- ResponseDocument2 pagesResponseАлександр ШтруновNo ratings yet
- JF - 2 - 3 - ProjectSolution Procedures and Arguments 6pDocument6 pagesJF - 2 - 3 - ProjectSolution Procedures and Arguments 6pNikos PapadoulopoulosNo ratings yet
- User InterfacesDocument1 pageUser InterfacesВо ВаNo ratings yet
- 3102213-En FW-UL6W FireWorks Workstation Installation ManualDocument62 pages3102213-En FW-UL6W FireWorks Workstation Installation ManualTrung Thành VõNo ratings yet
- QD-BR-ST-PHI-0001 - B2 - Topside Structures Design PremiseDocument24 pagesQD-BR-ST-PHI-0001 - B2 - Topside Structures Design PremisefedemochileroNo ratings yet






































































































Download as pdf or txt
You might also like
- Griffiths D.J. Introduction To Quantum Mechanics Solution ManualDocument184 pagesGriffiths D.J. Introduction To Quantum Mechanics Solution ManualAhmed Mahmoud83% (24)
- 1 s2.0 S002002551300532X Main PDFDocument17 pages1 s2.0 S002002551300532X Main PDFitzgayaNo ratings yet
- Conclusions and Future ResearchDocument15 pagesConclusions and Future ResearchPetrus FendiyantoNo ratings yet
- Robust Deadlock Detection and Control of Automated Manufacturing Systems With Multiple Unreliable Resources Using Petri NetsDocument13 pagesRobust Deadlock Detection and Control of Automated Manufacturing Systems With Multiple Unreliable Resources Using Petri NetssoniathalavoorNo ratings yet
- Towards Flight Control Verification Using AutomateDocument13 pagesTowards Flight Control Verification Using AutomateAlaa AyoubNo ratings yet
- Adaptive NN Fault Tolerant Control For Discrete Time Systems in Triangular Forms With Actuator Fault 2015 NeurocomputingDocument13 pagesAdaptive NN Fault Tolerant Control For Discrete Time Systems in Triangular Forms With Actuator Fault 2015 NeurocomputingAravindan MohanNo ratings yet
- A Petri Net Based Deadlock Prevention Policy For FDocument13 pagesA Petri Net Based Deadlock Prevention Policy For FsoniathalavoorNo ratings yet
- Health Monitoring of Civil Structures With Integrated UAV and Image Processing SystemDocument8 pagesHealth Monitoring of Civil Structures With Integrated UAV and Image Processing SystemRanjani VasuNo ratings yet
- Analysis and Implementation of Local Modular Supervisory Control For A Manufacturing Cell - A Case StudyDocument6 pagesAnalysis and Implementation of Local Modular Supervisory Control For A Manufacturing Cell - A Case StudyIAEME PublicationNo ratings yet
- A Survey of Fractional Order Calculus Applications of Multiple-Input, Multiple-Output (MIMO) Process ControlDocument32 pagesA Survey of Fractional Order Calculus Applications of Multiple-Input, Multiple-Output (MIMO) Process ControlS AbdNo ratings yet
- Papers Ball and PlateDocument8 pagesPapers Ball and PlateRodriNo ratings yet
- The Simulation ofDocument8 pagesThe Simulation ofYannPascalNo ratings yet
- Optimal Control of A Teleoperation System Via LMI - Based Robust PID ControllersDocument10 pagesOptimal Control of A Teleoperation System Via LMI - Based Robust PID ControllersidescitationNo ratings yet
- An Approach To Control Automated WarehouDocument19 pagesAn Approach To Control Automated WarehouIlker CetinNo ratings yet
- Aldeen IEE-CTA 1992Document10 pagesAldeen IEE-CTA 1992Abhishek RanjanNo ratings yet
- Distance-And Velocity-Based Collision Avoidance For Time-Varying Formation Control of Second-Order Multi-Agent SystemsDocument5 pagesDistance-And Velocity-Based Collision Avoidance For Time-Varying Formation Control of Second-Order Multi-Agent SystemsMy LordNo ratings yet
- Sliding Mode Methods For Fault Detection and Fault Tolerant ControlDocument12 pagesSliding Mode Methods For Fault Detection and Fault Tolerant ControljopiterNo ratings yet
- Petrinet - Tutorial PDFDocument17 pagesPetrinet - Tutorial PDFsubramanya1982No ratings yet
- PannocchiaLaachiRawlings 10373 FTPDocument12 pagesPannocchiaLaachiRawlings 10373 FTPdougmart8No ratings yet
- Articulo An Introduction To Event-Based Control For Networked Control SystemsDocument6 pagesArticulo An Introduction To Event-Based Control For Networked Control SystemsPaulina MarquezNo ratings yet
- Sliding-Mode Formation Control For Cooperative Autonomous Mobile RobotsDocument10 pagesSliding-Mode Formation Control For Cooperative Autonomous Mobile RobotsNardenioMartinsNo ratings yet
- 2 PDFDocument11 pages2 PDFMowafak HassanNo ratings yet
- Observer Design For State Variable Feedback Controller by MatlabDocument21 pagesObserver Design For State Variable Feedback Controller by MatlabDaniel Felipe Urdinila PatiñoNo ratings yet
- Blanke, M. y Frei, CDocument12 pagesBlanke, M. y Frei, CRoberto DGNo ratings yet
- Geno Fuzzy SpacecraftDocument5 pagesGeno Fuzzy SpacecraftsmedreaNo ratings yet
- 3-Degree-Of-Freedom Parallel Robot Control Based Fuzzy TheoryDocument4 pages3-Degree-Of-Freedom Parallel Robot Control Based Fuzzy TheoryLamiss HamdNo ratings yet
- Power System StabilityDocument9 pagesPower System StabilityMyScribdddNo ratings yet
- Control Engineering Practice: Ting Yang, Yili Fu, Mahdi TavakoliDocument11 pagesControl Engineering Practice: Ting Yang, Yili Fu, Mahdi Tavakolijose luis huayanay villarNo ratings yet
- A Table Lookup Scheme For Fuzzy Logic Based Model Identification Applied To Time Series PredictionDocument8 pagesA Table Lookup Scheme For Fuzzy Logic Based Model Identification Applied To Time Series PredictionArifaldy SatriadiNo ratings yet
- A3PAT, An Approach For Certified Automated Termination ProofsDocument10 pagesA3PAT, An Approach For Certified Automated Termination ProofsVictor LaszloNo ratings yet
- 400 Bad Request 400 Bad Request Nginx/1.2.9Document17 pages400 Bad Request 400 Bad Request Nginx/1.2.9Shobeir TabasiNo ratings yet
- Jin 2013Document15 pagesJin 2013Sidhant SharanNo ratings yet
- A Self-Organizing Fuzzy Controller With A Fixed Maximum Number of Rules and An Adaptive Similarity FactorDocument44 pagesA Self-Organizing Fuzzy Controller With A Fixed Maximum Number of Rules and An Adaptive Similarity FactormbxbenaNo ratings yet
- 255 - For Ubicc - 255Document6 pages255 - For Ubicc - 255Ubiquitous Computing and Communication JournalNo ratings yet
- Flatness Based Trajectory Generation For A Helicopter UAV: S. TaamallahDocument25 pagesFlatness Based Trajectory Generation For A Helicopter UAV: S. TaamallahnlrlibraryNo ratings yet
- Simulation Approach To Model Queuing Problems: December 2011Document13 pagesSimulation Approach To Model Queuing Problems: December 2011Bini YamNo ratings yet
- Introduction To Real-Time Control Using Labview With An Application To Distance LearningDocument18 pagesIntroduction To Real-Time Control Using Labview With An Application To Distance LearningMarlon José Do CarmoNo ratings yet
- Solving A Congestion Problem of Tasks in A Real-Time SystemDocument5 pagesSolving A Congestion Problem of Tasks in A Real-Time SystemJournal of ComputingNo ratings yet
- Cooperative Control of Multiple QuadrotoDocument10 pagesCooperative Control of Multiple QuadrotoTomislav SertićNo ratings yet
- Pipeline Architecture: C. V. RamamoorthyDocument42 pagesPipeline Architecture: C. V. Ramamoorthykarunya.varmaNo ratings yet
- Hardware in The Loop Simulation Underwater UnmannedDocument6 pagesHardware in The Loop Simulation Underwater UnmannedhilgadNo ratings yet
- Bicego2020 Article NonlinearModelPredictiveContro PDFDocument35 pagesBicego2020 Article NonlinearModelPredictiveContro PDFEddylson Aguilar CasquinoNo ratings yet
- A Novel Completeness Test and Its Application To Side Channel Attacks and SimulatorsDocument36 pagesA Novel Completeness Test and Its Application To Side Channel Attacks and SimulatorsANo ratings yet
- Fault Estimation For Discrete-Time Switched Nonlinear Systems With Discrete and Distributed DelaysDocument17 pagesFault Estimation For Discrete-Time Switched Nonlinear Systems With Discrete and Distributed DelaysBALASUBRAMANI MNo ratings yet
- Model-Based Performance Anticipation in Multi-Tier Autonomic Systems: Methodology and ExperimentsDocument15 pagesModel-Based Performance Anticipation in Multi-Tier Autonomic Systems: Methodology and ExperimentsTehman NiaziNo ratings yet
- On Computer Aided Control System Design. August 1999, Pages 522-527Document7 pagesOn Computer Aided Control System Design. August 1999, Pages 522-527adilsondissoNo ratings yet
- A Review of Methods For Input/output Selection: Marc Van de Wal, Bram de JagerDocument24 pagesA Review of Methods For Input/output Selection: Marc Van de Wal, Bram de JagerAjeet MishraNo ratings yet
- Iros 2016 ReplanningDocument9 pagesIros 2016 Replanningbruno.pinto.rosNo ratings yet
- Evolutionary Robot Wall-Following Control UsingDocument13 pagesEvolutionary Robot Wall-Following Control UsingFatima AhsanNo ratings yet
- Petri Net Versus Queuing Theory For Evaluation of Flexible Manufacturing SystemsDocument8 pagesPetri Net Versus Queuing Theory For Evaluation of Flexible Manufacturing SystemsShahbazKhanNo ratings yet
- WCE2010 pp1679-1685Document8 pagesWCE2010 pp1679-1685Moh IneNo ratings yet
- Pref Ace: 1. Gain Scheduling: in This Method, Typically, The Full OperatingDocument6 pagesPref Ace: 1. Gain Scheduling: in This Method, Typically, The Full OperatingBiplab SatpatiNo ratings yet
- 1.1 BackgroundDocument15 pages1.1 BackgroundPetrus FendiyantoNo ratings yet
- Tolerante A FallosDocument10 pagesTolerante A FallosDaniel SanchezNo ratings yet
- DroneDocument6 pagesDroneMarcos FernandesNo ratings yet
- Redes IndustrialesDocument11 pagesRedes IndustrialeskagantsNo ratings yet
- 00966777Document9 pages00966777arthy_mariappan3873No ratings yet
- Determinacion Del d50c PDFDocument5 pagesDeterminacion Del d50c PDFAnonymous caHv3DvtNo ratings yet
- Fuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineDocument5 pagesFuzzy Logic Approach For Fault Diagnosis of Three Phase Transmission LineJournal 4 ResearchNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Appendix 1: Table A.1.1 Car Arrival and Repair DataDocument59 pagesAppendix 1: Table A.1.1 Car Arrival and Repair DataitzgayaNo ratings yet
- SCIENTIST-B of ICMR by PGIMER, ChandigarhDocument17 pagesSCIENTIST-B of ICMR by PGIMER, ChandigarhitzgayaNo ratings yet
- Sciencedirect: A. Santana, P. Afonso, A. Zanin, R. WernkeDocument8 pagesSciencedirect: A. Santana, P. Afonso, A. Zanin, R. WernkeitzgayaNo ratings yet
- An Enhanced Firefly Algorithm Approach For Solving A Flexible Job-Shop Scheduling ProblemDocument6 pagesAn Enhanced Firefly Algorithm Approach For Solving A Flexible Job-Shop Scheduling ProblemitzgayaNo ratings yet
- Molecular ResturctureDocument10 pagesMolecular ResturctureitzgayaNo ratings yet
- Advanced Approaches For Obesity and EndocrinologyDocument1 pageAdvanced Approaches For Obesity and EndocrinologyitzgayaNo ratings yet
- An Enhanced Genetic Algorithm With Simulated Annealing For Job-Shop SchedulingDocument8 pagesAn Enhanced Genetic Algorithm With Simulated Annealing For Job-Shop SchedulingitzgayaNo ratings yet
- A Hybrid Artificial Bee Colony Algorithm For Flexible Job Shop Scheduling With Worker FlexibilityDocument16 pagesA Hybrid Artificial Bee Colony Algorithm For Flexible Job Shop Scheduling With Worker FlexibilityitzgayaNo ratings yet
- Computers & Industrial Engineering: SciencedirectDocument16 pagesComputers & Industrial Engineering: SciencedirectitzgayaNo ratings yet
- A Discrete Firefly Algorithm For Solving The Flexible Job-Shop Scheduling Problem in A Make-To-Order Manufacturing SystemDocument22 pagesA Discrete Firefly Algorithm For Solving The Flexible Job-Shop Scheduling Problem in A Make-To-Order Manufacturing SystemitzgayaNo ratings yet
- A Comprehensive Survey and Future Trend ofDocument16 pagesA Comprehensive Survey and Future Trend ofitzgayaNo ratings yet
- The Classification of FMS Scheduling Problems PDFDocument10 pagesThe Classification of FMS Scheduling Problems PDFitzgayaNo ratings yet
- Summary of The Results: Scheduling FMS Using Heuristic and Search TechniquesDocument7 pagesSummary of The Results: Scheduling FMS Using Heuristic and Search TechniquesitzgayaNo ratings yet
- AGV Schedule Integrated With Production in FlexibleDocument13 pagesAGV Schedule Integrated With Production in FlexibleitzgayaNo ratings yet
- Oracle SetupsDocument26 pagesOracle SetupsDaama ChowdharyNo ratings yet
- 1CH-1 Fundamentals of PhysicsDocument29 pages1CH-1 Fundamentals of PhysicsGauravSaxenaNo ratings yet
- Construction Techniques and Equipment PracticesDocument4 pagesConstruction Techniques and Equipment PracticeskalpanaNo ratings yet
- Nordin Air Filters For TurbinesDocument12 pagesNordin Air Filters For TurbinesJorge Cuadros BlasNo ratings yet
- Lesson Plan Template 2021Document3 pagesLesson Plan Template 2021api-550991282No ratings yet
- Social, Academic, and Business Communication in The Junctures of LifeDocument2 pagesSocial, Academic, and Business Communication in The Junctures of LifeCristina RocheNo ratings yet
- Production of RubberDocument25 pagesProduction of RubberCarmel100% (1)
- Rubic Project 2 - Video AnimationDocument1 pageRubic Project 2 - Video AnimationAliana RosuriNo ratings yet
- Hydrocarbon Engineering, April 2024Document76 pagesHydrocarbon Engineering, April 2024Reyes SanchezNo ratings yet
- Lean Business CanvasDocument27 pagesLean Business CanvasSofeaNo ratings yet
- 1Nz-Fe Engine Mechanical: Service DataDocument3 pages1Nz-Fe Engine Mechanical: Service Dataalbert phiri100% (2)
- ScalaDocument16 pagesScalaSamara SequeiraNo ratings yet
- Petroleum Geology. Log Interpretation (001-080)Document80 pagesPetroleum Geology. Log Interpretation (001-080)saedali22330044No ratings yet
- Re-Thinking Town and Country Planning Practice in ZambiaDocument11 pagesRe-Thinking Town and Country Planning Practice in ZambiaLushimba Chileya100% (1)
- An Introduction To Technical CommunicationDocument20 pagesAn Introduction To Technical Communicationmithu11100% (1)
- What Is Concrete Curing Compound?Document17 pagesWhat Is Concrete Curing Compound?SHAIK ASIMUDDIN100% (2)
- SSI SetupDocument22 pagesSSI SetupSomnath DasNo ratings yet
- Newte Bag Palletizing 2Document4 pagesNewte Bag Palletizing 2Kien Nguyen TrungNo ratings yet
- Product CAT RSTI - DatasheetDocument10 pagesProduct CAT RSTI - Datasheetman wei ngNo ratings yet
- Nota SKAA4412-Lab PDFDocument32 pagesNota SKAA4412-Lab PDFsyamsul anwarNo ratings yet
- Fox Et Al. 1 2011Document10 pagesFox Et Al. 1 2011Elena BuduroiNo ratings yet
- Datasheet PlateCatcher 2018Document4 pagesDatasheet PlateCatcher 2018Secure LifeNo ratings yet
- Radiation Emergency PlanDocument31 pagesRadiation Emergency PlanBenasher Ibrahim100% (1)
- Operating Instructions (ETC-100) : Pre-Use Inspection and Requirements For Installation FunctionsDocument1 pageOperating Instructions (ETC-100) : Pre-Use Inspection and Requirements For Installation FunctionsLewis AmundarainNo ratings yet
- ResponseDocument2 pagesResponseАлександр ШтруновNo ratings yet
- JF - 2 - 3 - ProjectSolution Procedures and Arguments 6pDocument6 pagesJF - 2 - 3 - ProjectSolution Procedures and Arguments 6pNikos PapadoulopoulosNo ratings yet
- User InterfacesDocument1 pageUser InterfacesВо ВаNo ratings yet
- 3102213-En FW-UL6W FireWorks Workstation Installation ManualDocument62 pages3102213-En FW-UL6W FireWorks Workstation Installation ManualTrung Thành VõNo ratings yet
- QD-BR-ST-PHI-0001 - B2 - Topside Structures Design PremiseDocument24 pagesQD-BR-ST-PHI-0001 - B2 - Topside Structures Design PremisefedemochileroNo ratings yet