
Machine Elements
Machine Elements
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Volvo V70 XC70 Wiring DiagramDocument265 pagesVolvo V70 XC70 Wiring DiagramJan100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fiat Barchetta: Electrical EquipmentDocument22 pagesFiat Barchetta: Electrical EquipmentHallex Oliveira100% (1)
- 8310 Nissan Juke Model F15 SeriesDocument149 pages8310 Nissan Juke Model F15 SeriesEngr Ko VictorNo ratings yet
- Australian New Car Buyer - December 2021Document148 pagesAustralian New Car Buyer - December 2021ကို ဇေNo ratings yet
- Caterpillar 910 Wheel Loader Operators Manual SN 80u1 and UpDocument7 pagesCaterpillar 910 Wheel Loader Operators Manual SN 80u1 and Upbambangpadhi7No ratings yet
- 2022mt13057 EdgeComputing Assignment1 Autonomous VehiclesDocument16 pages2022mt13057 EdgeComputing Assignment1 Autonomous VehicleslikhitgatagatNo ratings yet
- SkodaDocument21 pagesSkodaabcNo ratings yet
- 315B Forest Swing Machine Electrical System: 7RZ284-UPDocument2 pages315B Forest Swing Machine Electrical System: 7RZ284-UPGilvan JuniorNo ratings yet
- Vergo EDocument2 pagesVergo EAlfonso GarcíaNo ratings yet
- BA+VERSA+Kolben en 102619 2011 05 Rev.ADocument18 pagesBA+VERSA+Kolben en 102619 2011 05 Rev.APappa Mihai RazvanNo ratings yet
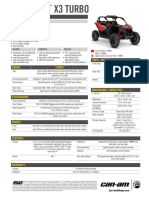
- 2020 Maverick X3 Turbo enDocument1 page2020 Maverick X3 Turbo enAwan AJaNo ratings yet
- SPE 29510 Decision Tree For Selection of Artificial Lift MethodDocument8 pagesSPE 29510 Decision Tree For Selection of Artificial Lift MethodNicöle ClerqueNo ratings yet
- Cb500x/xa: 42MKPC00 00X42-MKP-C000Document145 pagesCb500x/xa: 42MKPC00 00X42-MKP-C000Adam Fadlurahman100% (1)
- Entrance CPSI Test - Ver 2Document10 pagesEntrance CPSI Test - Ver 2Ali DiabNo ratings yet
- Effect of Exhaust System Design On Engine Performance: Tim G. AdamsDocument19 pagesEffect of Exhaust System Design On Engine Performance: Tim G. AdamshiwotiNo ratings yet
- Air Conditioning Gauges - How Does HVAC Gauges WorksDocument4 pagesAir Conditioning Gauges - How Does HVAC Gauges WorksIsramanNo ratings yet
- Changan China Cm8 Blade: Brand Area Model Key Type YearDocument21 pagesChangan China Cm8 Blade: Brand Area Model Key Type YearCharly Alberto0% (1)
- Aft-Catalog s6 Sec Valvula AtlanticDocument79 pagesAft-Catalog s6 Sec Valvula AtlanticHector DiazNo ratings yet
- Honda City SV: 124 BHP at 6000 RPM 170 NM at 1400 RPMDocument10 pagesHonda City SV: 124 BHP at 6000 RPM 170 NM at 1400 RPMdilip patilNo ratings yet
- Steerprop Operation ManualDocument21 pagesSteerprop Operation ManualcesekaraaNo ratings yet
- DFC Description Class Torque Limiter P-CodeDocument38 pagesDFC Description Class Torque Limiter P-CodeHabisco LtdNo ratings yet
- ABB - Motor Selection For VSDDocument16 pagesABB - Motor Selection For VSDMadhabdi Power PlantNo ratings yet
- Ceccato - CSM 21-40Document6 pagesCeccato - CSM 21-40Ashraf m aliNo ratings yet
- Isuzu Engine 6wf1 TC Commanrail Workshop ManualDocument20 pagesIsuzu Engine 6wf1 TC Commanrail Workshop Manualfrank100% (56)
- Sl. Partno. Description Application 2021 MRPDocument13 pagesSl. Partno. Description Application 2021 MRPKazi UdhoyNo ratings yet
- Model Data - For Compressed Air Atlas Copco Compressors, Inc GA 18 Pack 1Document1 pageModel Data - For Compressed Air Atlas Copco Compressors, Inc GA 18 Pack 1manuel solano gomezNo ratings yet
- Crew Boat Required SpecificationDocument12 pagesCrew Boat Required SpecificationAamir SirohiNo ratings yet
- Model GPD: Diesel Engine Fire Pump ControllersDocument4 pagesModel GPD: Diesel Engine Fire Pump ControllersEduardo Villanueva PríncipeNo ratings yet
- CAT - 3126B.Prefix 8WL, 1WM, 4ES, or 2CWDocument13 pagesCAT - 3126B.Prefix 8WL, 1WM, 4ES, or 2CWnenadNo ratings yet
- Owners Manual - Desert - X - EN - MY23Document332 pagesOwners Manual - Desert - X - EN - MY23Pedro SousaNo ratings yet




































































Download as docx, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Volvo V70 XC70 Wiring DiagramDocument265 pagesVolvo V70 XC70 Wiring DiagramJan100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fiat Barchetta: Electrical EquipmentDocument22 pagesFiat Barchetta: Electrical EquipmentHallex Oliveira100% (1)
- 8310 Nissan Juke Model F15 SeriesDocument149 pages8310 Nissan Juke Model F15 SeriesEngr Ko VictorNo ratings yet
- Australian New Car Buyer - December 2021Document148 pagesAustralian New Car Buyer - December 2021ကို ဇေNo ratings yet
- Caterpillar 910 Wheel Loader Operators Manual SN 80u1 and UpDocument7 pagesCaterpillar 910 Wheel Loader Operators Manual SN 80u1 and Upbambangpadhi7No ratings yet
- 2022mt13057 EdgeComputing Assignment1 Autonomous VehiclesDocument16 pages2022mt13057 EdgeComputing Assignment1 Autonomous VehicleslikhitgatagatNo ratings yet
- SkodaDocument21 pagesSkodaabcNo ratings yet
- 315B Forest Swing Machine Electrical System: 7RZ284-UPDocument2 pages315B Forest Swing Machine Electrical System: 7RZ284-UPGilvan JuniorNo ratings yet
- Vergo EDocument2 pagesVergo EAlfonso GarcíaNo ratings yet
- BA+VERSA+Kolben en 102619 2011 05 Rev.ADocument18 pagesBA+VERSA+Kolben en 102619 2011 05 Rev.APappa Mihai RazvanNo ratings yet
- 2020 Maverick X3 Turbo enDocument1 page2020 Maverick X3 Turbo enAwan AJaNo ratings yet
- SPE 29510 Decision Tree For Selection of Artificial Lift MethodDocument8 pagesSPE 29510 Decision Tree For Selection of Artificial Lift MethodNicöle ClerqueNo ratings yet
- Cb500x/xa: 42MKPC00 00X42-MKP-C000Document145 pagesCb500x/xa: 42MKPC00 00X42-MKP-C000Adam Fadlurahman100% (1)
- Entrance CPSI Test - Ver 2Document10 pagesEntrance CPSI Test - Ver 2Ali DiabNo ratings yet
- Effect of Exhaust System Design On Engine Performance: Tim G. AdamsDocument19 pagesEffect of Exhaust System Design On Engine Performance: Tim G. AdamshiwotiNo ratings yet
- Air Conditioning Gauges - How Does HVAC Gauges WorksDocument4 pagesAir Conditioning Gauges - How Does HVAC Gauges WorksIsramanNo ratings yet
- Changan China Cm8 Blade: Brand Area Model Key Type YearDocument21 pagesChangan China Cm8 Blade: Brand Area Model Key Type YearCharly Alberto0% (1)
- Aft-Catalog s6 Sec Valvula AtlanticDocument79 pagesAft-Catalog s6 Sec Valvula AtlanticHector DiazNo ratings yet
- Honda City SV: 124 BHP at 6000 RPM 170 NM at 1400 RPMDocument10 pagesHonda City SV: 124 BHP at 6000 RPM 170 NM at 1400 RPMdilip patilNo ratings yet
- Steerprop Operation ManualDocument21 pagesSteerprop Operation ManualcesekaraaNo ratings yet
- DFC Description Class Torque Limiter P-CodeDocument38 pagesDFC Description Class Torque Limiter P-CodeHabisco LtdNo ratings yet
- ABB - Motor Selection For VSDDocument16 pagesABB - Motor Selection For VSDMadhabdi Power PlantNo ratings yet
- Ceccato - CSM 21-40Document6 pagesCeccato - CSM 21-40Ashraf m aliNo ratings yet
- Isuzu Engine 6wf1 TC Commanrail Workshop ManualDocument20 pagesIsuzu Engine 6wf1 TC Commanrail Workshop Manualfrank100% (56)
- Sl. Partno. Description Application 2021 MRPDocument13 pagesSl. Partno. Description Application 2021 MRPKazi UdhoyNo ratings yet
- Model Data - For Compressed Air Atlas Copco Compressors, Inc GA 18 Pack 1Document1 pageModel Data - For Compressed Air Atlas Copco Compressors, Inc GA 18 Pack 1manuel solano gomezNo ratings yet
- Crew Boat Required SpecificationDocument12 pagesCrew Boat Required SpecificationAamir SirohiNo ratings yet
- Model GPD: Diesel Engine Fire Pump ControllersDocument4 pagesModel GPD: Diesel Engine Fire Pump ControllersEduardo Villanueva PríncipeNo ratings yet
- CAT - 3126B.Prefix 8WL, 1WM, 4ES, or 2CWDocument13 pagesCAT - 3126B.Prefix 8WL, 1WM, 4ES, or 2CWnenadNo ratings yet
- Owners Manual - Desert - X - EN - MY23Document332 pagesOwners Manual - Desert - X - EN - MY23Pedro SousaNo ratings yet