Download as docx, pdf, or txt
You might also like
- Engine + Generator - Engineering Manual Rev.1 (RECIBIDO 6-11-12) PDFDocument159 pagesEngine + Generator - Engineering Manual Rev.1 (RECIBIDO 6-11-12) PDFJavier Everest50% (2)
- Transformer Lab ManualDocument68 pagesTransformer Lab ManualRolando Cruz100% (1)
- 1 2-ProblemSetSolutionsDocument4 pages1 2-ProblemSetSolutionsbobnh100% (3)
- Caterpillar Product Speci CationsDocument4 pagesCaterpillar Product Speci CationsJorge Enrique Pulido AyalaNo ratings yet
- Informatica Deployment ChecklistDocument9 pagesInformatica Deployment Checklisttajsmart1No ratings yet
- Puma 300Document20 pagesPuma 300Kirill SmirnovNo ratings yet
- РЛЭ Дьюк 60Document170 pagesРЛЭ Дьюк 60valentine_avia100% (4)
- Experiment 2Document16 pagesExperiment 2roxetteNo ratings yet
- Feedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsDocument15 pagesFeedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsYvesExequielPascuaNo ratings yet
- Feedback and Control Systems Lab ManualDocument72 pagesFeedback and Control Systems Lab Manualmamaw231100% (1)
- Activity01 (1) CarreonDocument14 pagesActivity01 (1) CarreonHaja Kiev Erenz CarreonNo ratings yet
- Experiment 1Document13 pagesExperiment 1Mike QuinteroNo ratings yet
- Feedback and Control Systems: Activity No. 1 - System Modeling and SimulationDocument13 pagesFeedback and Control Systems: Activity No. 1 - System Modeling and SimulationkennethNo ratings yet
- Experiment 4Document8 pagesExperiment 4Tonie Adrian DiamanteNo ratings yet
- Control System Lab Manual (Kec-652)Document29 pagesControl System Lab Manual (Kec-652)VIKASH YADAVNo ratings yet
- Matlab Laboratory (ELEC-323) Session III: Second-Order Systems 1. OverviewDocument4 pagesMatlab Laboratory (ELEC-323) Session III: Second-Order Systems 1. Overviewfancy_maskNo ratings yet
- FeedConunit 2Document51 pagesFeedConunit 2Jerc ZajNo ratings yet
- Activity 03Document11 pagesActivity 03Joshua AbadNo ratings yet
- CONTROL SYSTEM Lab ManualDocument17 pagesCONTROL SYSTEM Lab ManualMahavir ChavdaNo ratings yet
- Experiment No. 01 Introduction To System Representation and Observation Using MATLABDocument20 pagesExperiment No. 01 Introduction To System Representation and Observation Using MATLABRakayet RafiNo ratings yet
- Experiment 3Document7 pagesExperiment 3Usama NadeemNo ratings yet
- Higher National Diploma in Engineering: Assessment BriefDocument22 pagesHigher National Diploma in Engineering: Assessment BriefTân NguyễnNo ratings yet
- 4150 Lab 3Document6 pages4150 Lab 3Tan Nguyen VanNo ratings yet
- Gnum Poly ( (3 5) ) Gden Poly ( (-1 - 2) ) Hnum (1) HdenDocument8 pagesGnum Poly ( (3 5) ) Gden Poly ( (-1 - 2) ) Hnum (1) HdenJoshua AbadNo ratings yet
- Lab # 8 Control SystemDocument10 pagesLab # 8 Control SystemZabeehullahmiakhailNo ratings yet
- CS LabReport 2Document8 pagesCS LabReport 2Muhammad AfzaalNo ratings yet
- ps3 (1) From MAE 4780Document5 pagesps3 (1) From MAE 4780fooz10No ratings yet
- Lab 9Document3 pagesLab 9Medo SaeediNo ratings yet
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaNo ratings yet
- GENG5503 Modern Control Systems Lab 1 Mathematical Modeling: V. SreeramDocument6 pagesGENG5503 Modern Control Systems Lab 1 Mathematical Modeling: V. SreeramVictor SreeramNo ratings yet
- USE MATLAB/SIMULINK/SCILAB/LABVIEW (Use Any One Tool)Document7 pagesUSE MATLAB/SIMULINK/SCILAB/LABVIEW (Use Any One Tool)SanthoshNo ratings yet
- NI Tutorial 6463 enDocument6 pagesNI Tutorial 6463 enAmaury BarronNo ratings yet
- Lab 06 PDFDocument7 pagesLab 06 PDFAbdul Rehman AfzalNo ratings yet
- EEN 407 Sample QuestionsDocument41 pagesEEN 407 Sample QuestionsAbu SiddiqueNo ratings yet
- HW 5Document2 pagesHW 5Mahir MahmoodNo ratings yet
- ENGR 058 (Control Theory) Final: 1) Define The SystemDocument24 pagesENGR 058 (Control Theory) Final: 1) Define The SystemBizzleJohnNo ratings yet
- Atienza Lab3Document18 pagesAtienza Lab3Marvin AtienzaNo ratings yet
- Lab Experiment 2Document5 pagesLab Experiment 2BerentoNo ratings yet
- Lab # 8 SolvedDocument10 pagesLab # 8 SolvedZabeehullahmiakhailNo ratings yet
- Problem Based Learning For Control System 2019 2020Document7 pagesProblem Based Learning For Control System 2019 2020maketoNo ratings yet
- ENGG3410 Lab 2 Prelab Assignment: Question 1: System AnalysisDocument2 pagesENGG3410 Lab 2 Prelab Assignment: Question 1: System AnalysisaliNo ratings yet
- Control System Question BankDocument12 pagesControl System Question Banksagar R RaoNo ratings yet
- CSE Journal (304111 TY-1)Document53 pagesCSE Journal (304111 TY-1)Akash BNo ratings yet
- Sample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Document8 pagesSample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Priyesh PandeyNo ratings yet
- State Space For Control SystemsDocument21 pagesState Space For Control SystemsZhraa NorNo ratings yet
- Final Exam Version A-1Document2 pagesFinal Exam Version A-1ahmedabdulkarim554No ratings yet
- Modeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentDocument13 pagesModeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentLittle_skipNo ratings yet
- QB BcsDocument10 pagesQB BcsKrishna Reddy Y.VNo ratings yet
- Control System Engineering: Lab ManualDocument18 pagesControl System Engineering: Lab ManualUmair Afzal ShuklaNo ratings yet
- Interpretation: Fernando, Ram F. EE-2/ B11Document6 pagesInterpretation: Fernando, Ram F. EE-2/ B11Ram FernandoNo ratings yet
- Control System (PT)Document7 pagesControl System (PT)MATHANKUMAR.SNo ratings yet
- Lab 4: Linear Time-Invariant Systems and Representation: ObjectivesDocument6 pagesLab 4: Linear Time-Invariant Systems and Representation: ObjectivesFahad AneebNo ratings yet
- FLab-08 EXP8Document8 pagesFLab-08 EXP8Carl Kevin CartijanoNo ratings yet
- VI Sem ECEDocument12 pagesVI Sem ECESenthil Kumar KrishnanNo ratings yet
- Lab 05Document5 pagesLab 05MUHAMMAD ARSLANNo ratings yet
- Lab TasksDocument53 pagesLab TasksAhmed SaeedNo ratings yet
- EE132 Lab1 OL Vs CLDocument3 pagesEE132 Lab1 OL Vs CLthinkberry22No ratings yet
- Exercises 16.06 16.07 Matlab SimulinkDocument6 pagesExercises 16.06 16.07 Matlab SimulinkflowerboyNo ratings yet
- LAB 1: Introduction To MATLAB and SimulinkDocument14 pagesLAB 1: Introduction To MATLAB and Simulinkwanxin leiNo ratings yet
- Exp. No. (8) State Space and Transfer Function ObjectiveDocument8 pagesExp. No. (8) State Space and Transfer Function Objectiveyusuf yuyuNo ratings yet
- 2 Year System Dynamics Sheet 6Document4 pages2 Year System Dynamics Sheet 6Yasser BahaaNo ratings yet
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDocument12 pagesExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorNo ratings yet
- Mannual 2020-21Document89 pagesMannual 2020-21MAMILLAPALLI VARA LAKSHMI NIT APNo ratings yet
- Matlab CourseDocument114 pagesMatlab CourseGeorge IskanderNo ratings yet
- Machine Problem 4Document12 pagesMachine Problem 4JERUELNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Attendance SheetDocument2 pagesAttendance SheetRolando CruzNo ratings yet
- Powplant V4 Print PDFDocument355 pagesPowplant V4 Print PDFRolando CruzNo ratings yet
- POWSYS FINAL With PARETODocument535 pagesPOWSYS FINAL With PARETORolando CruzNo ratings yet
- Lab1: Statistics/Probability (Take Home) : Measurements and Instrumentation Fall 2001Document11 pagesLab1: Statistics/Probability (Take Home) : Measurements and Instrumentation Fall 2001Rolando CruzNo ratings yet
- Mathrix Customer Services Provider: Home-Based Tutorial Attendance SheetDocument1 pageMathrix Customer Services Provider: Home-Based Tutorial Attendance SheetRolando CruzNo ratings yet
- Technological Institute of The Philippines - Manila Thesis/ Design Project Advisors and Panel MembersDocument1 pageTechnological Institute of The Philippines - Manila Thesis/ Design Project Advisors and Panel MembersRolando CruzNo ratings yet
- Question Bank - MidtermDocument4 pagesQuestion Bank - MidtermRolando Cruz100% (1)
- B. 3.85, 3.8485 and 3.8515 MHZ Sine WavesDocument1 pageB. 3.85, 3.8485 and 3.8515 MHZ Sine WavesRolando CruzNo ratings yet
- Technological Institute of The Philippines 1338 Arlegui St. Quaipo ManilaDocument3 pagesTechnological Institute of The Philippines 1338 Arlegui St. Quaipo ManilaRolando CruzNo ratings yet
- SE 095 InstructionsDocument21 pagesSE 095 InstructionsMauricioNo ratings yet
- IT Service Management (ITSM) Essentials: Computing and Information TechnologyDocument19 pagesIT Service Management (ITSM) Essentials: Computing and Information TechnologyPrateek ChitambareNo ratings yet
- HMI Embedded PCU 20 V06.05.49: SINUMERIK 810D / 840D Upgrade InstructionsDocument4 pagesHMI Embedded PCU 20 V06.05.49: SINUMERIK 810D / 840D Upgrade InstructionsNica BogdanNo ratings yet
- CAP2 - TRiiAGE Tools For Clariion Log Analysis - ENDocument16 pagesCAP2 - TRiiAGE Tools For Clariion Log Analysis - ENakuma27No ratings yet
- Eco NicalDocument13 pagesEco Nicalluizfellipe95No ratings yet
- Unveiling The Ultimate Electrical Switch: Revolutionize Your Home With This Game-Changing Device!Document4 pagesUnveiling The Ultimate Electrical Switch: Revolutionize Your Home With This Game-Changing Device!saanvisingh861No ratings yet
- CriteriaDocument7 pagesCriteriaShajahan ShagulNo ratings yet
- Mste605l Advanced-Concrete-Materials-And-Technology TH 1.0 68 Mste605lDocument2 pagesMste605l Advanced-Concrete-Materials-And-Technology TH 1.0 68 Mste605lnaveen kumarNo ratings yet
- Envisioning Sustainable Infrastructure For Smart CitiesDocument10 pagesEnvisioning Sustainable Infrastructure For Smart Citiesdrcss5327No ratings yet
- Static Electricity 1Document10 pagesStatic Electricity 1Tamer SameehNo ratings yet
- RP Pamphlet2 SchedulesDocument17 pagesRP Pamphlet2 Schedulesseychellian100% (1)
- IAL PresentationDocument55 pagesIAL PresentationPanneer SelvamNo ratings yet
- Facility LayoutDocument78 pagesFacility LayoutPrakhar RastogiNo ratings yet
- Chilled Water Cooling Plant Quarterly Insepction ReportDocument1 pageChilled Water Cooling Plant Quarterly Insepction ReportFaisal MuneerNo ratings yet
- Eutronic - Arc - Spray 4HFDocument4 pagesEutronic - Arc - Spray 4HFMuhammad irfanNo ratings yet
- Aluminum Crust BreakerDocument8 pagesAluminum Crust BreakersenamotoNo ratings yet
- Standard Machining ToleranceDocument1 pageStandard Machining ToleranceDenny Ilyas AttamimiNo ratings yet
- Trenching of Process PipingDocument5 pagesTrenching of Process PipingAkhilesh KumarNo ratings yet
- DFGDocument62 pagesDFGSatavisha MohapatraNo ratings yet
- Service Manual c60 c80 CompressedDocument518 pagesService Manual c60 c80 CompressedLeonardo- Maemtek EquipamentosNo ratings yet
- Carter Auto Water Pump Components 072420Document2 pagesCarter Auto Water Pump Components 072420geniusNo ratings yet
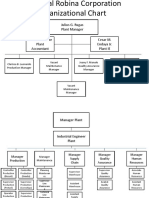
- Julius G. Rugas Plant Manager Cesar M. Endaya Jr. Plant IEDocument4 pagesJulius G. Rugas Plant Manager Cesar M. Endaya Jr. Plant IEJoshua MalibongNo ratings yet
- Cobalt DriveDocument5 pagesCobalt DriveEifla GonzalesNo ratings yet
- Trafoindo Catalogue Oil Immersed Transformers PDFDocument2 pagesTrafoindo Catalogue Oil Immersed Transformers PDFMustavaNo ratings yet