Download as pdf or txt
You might also like
- DEV3600 LabGuideDocument26 pagesDEV3600 LabGuideSaiidmaNo ratings yet
- Omega - Installation ManualDocument25 pagesOmega - Installation ManualCreaciones VilberNo ratings yet
- InstallGuideONESOURCEIDTIntegrationOracle12 5500 PDFDocument214 pagesInstallGuideONESOURCEIDTIntegrationOracle12 5500 PDFRajendra PilludaNo ratings yet
- Using C To Create Interrupt-Driven Systems On Blackfin® ProcessorsDocument9 pagesUsing C To Create Interrupt-Driven Systems On Blackfin® ProcessorsgroenedraakNo ratings yet
- Esc - 1991 - Vol2 - Page710 - Ward - Manipulating Hardware With CDocument6 pagesEsc - 1991 - Vol2 - Page710 - Ward - Manipulating Hardware With CGiap LeNo ratings yet
- Picoblaze Sample Design A Quick-Start Guide Using The Digilent NEXYS 2 Spartan 3E KitDocument5 pagesPicoblaze Sample Design A Quick-Start Guide Using The Digilent NEXYS 2 Spartan 3E KitElena DianaNo ratings yet
- CE148 ReadmeDocument3 pagesCE148 ReadmeIke DivinagraciaNo ratings yet
- Design of A 32-Bit Dual Pipeline Superscalar RISC-V Processor On FPGADocument4 pagesDesign of A 32-Bit Dual Pipeline Superscalar RISC-V Processor On FPGASRIRAAM VSNo ratings yet
- Mplab Xc16 User'S Guide For Embedded Engineers Mplab XC16 User's Guide For Embedded EngineersDocument36 pagesMplab Xc16 User'S Guide For Embedded Engineers Mplab XC16 User's Guide For Embedded Engineersjacho16No ratings yet
- Ds 50002400 BDocument30 pagesDs 50002400 BKavi ArasanNo ratings yet
- Ee - 105 - ADSP-2100 Family C Programming Examples Guide (En)Document61 pagesEe - 105 - ADSP-2100 Family C Programming Examples Guide (En)tiretrakNo ratings yet
- 02ddmethod PDFDocument46 pages02ddmethod PDFMohammad Mohsen AmiriNo ratings yet
- CE018 ReadmeDocument7 pagesCE018 ReadmejulionbaNo ratings yet
- Home Work 3: Class: M.C.A SECTION: RE3004 Course Code: CAP211Document15 pagesHome Work 3: Class: M.C.A SECTION: RE3004 Course Code: CAP211Vikas GuptaNo ratings yet
- Readme File For Code ExampleDocument12 pagesReadme File For Code ExamplejulionbaNo ratings yet
- EE 346 Microprocessor Principles and Applications An Introduction To Microcontrollers, Assembly Language, and Embedded SystemsDocument40 pagesEE 346 Microprocessor Principles and Applications An Introduction To Microcontrollers, Assembly Language, and Embedded SystemsAbG Compilation of VideosNo ratings yet
- MPLAB XC8 C Compiler UG EE DS50002400CDocument32 pagesMPLAB XC8 C Compiler UG EE DS50002400CEdilberto CarvajalNo ratings yet
- PS2 Controller IP Core For On Chip Embedded System ApplicationsDocument4 pagesPS2 Controller IP Core For On Chip Embedded System ApplicationsInternational Journal of computational Engineering research (IJCER)No ratings yet
- Systems Programming AssignmentDocument24 pagesSystems Programming Assignmentvajahat07No ratings yet
- 3 - Cortex-M3 ProgrammingDocument23 pages3 - Cortex-M3 ProgrammingNghĩa VũNo ratings yet
- Sms045 - DSP Systems in Practice Lab 2 - Adsp-2181 Ez-Kit Lite and Visualdsp++Document25 pagesSms045 - DSP Systems in Practice Lab 2 - Adsp-2181 Ez-Kit Lite and Visualdsp++Sami FarsiNo ratings yet
- J2 HWProgramUsingC Microproce Microprogr 94Document5 pagesJ2 HWProgramUsingC Microproce Microprogr 94subscriberzerooneNo ratings yet
- J2 HWProgramUsingC Microproce Microprogr 94Document5 pagesJ2 HWProgramUsingC Microproce Microprogr 94Emejuru ChukwuemekaNo ratings yet
- Design of A RISC Microcontroller Core in 48 HoursDocument11 pagesDesign of A RISC Microcontroller Core in 48 HoursPulkit TrivediNo ratings yet
- ReadmeDocument8 pagesReadmeElias Wilder Solano HuaroccNo ratings yet
- The Simplest Way To Examine The Advantages and Disadvantages of RISC Architecture Is by Contrasting It With ItDocument11 pagesThe Simplest Way To Examine The Advantages and Disadvantages of RISC Architecture Is by Contrasting It With ItsaadawarNo ratings yet
- Low-Cost and Optimized Two Layers Embedded Board BDocument14 pagesLow-Cost and Optimized Two Layers Embedded Board BJorge CotzomiNo ratings yet
- C28x Compiler - Understanding LinkingDocument10 pagesC28x Compiler - Understanding LinkingmsnNo ratings yet
- 03 Cisc RiscDocument37 pages03 Cisc RiscahmedNo ratings yet
- Real-Time DSP Laboratory1:: An Introduction To The TMS320C6713 DSKDocument25 pagesReal-Time DSP Laboratory1:: An Introduction To The TMS320C6713 DSKNagaraju NeelaNo ratings yet
- Cairo University SPARC V2 CUSPARC V2 ProcessorDocument4 pagesCairo University SPARC V2 CUSPARC V2 ProcessorcvsetfNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Secure Partial Reconfiguration of Fpgas: International Scientific Conference Computer Science'2008Document9 pagesSecure Partial Reconfiguration of Fpgas: International Scientific Conference Computer Science'2008khawlaaaNo ratings yet
- Topic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Document94 pagesTopic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Aya AmirNo ratings yet
- 1 Chapter - 5: Intermediate Code Generation Bahir Dar Institute of TechnologyDocument30 pages1 Chapter - 5: Intermediate Code Generation Bahir Dar Institute of TechnologyAbhilash SharmaNo ratings yet
- CPLD JtagDocument20 pagesCPLD Jtagjustinvil1103No ratings yet
- IC Compiler IIICC II后端设计流程超详细 - 凳子花的博客-CSDN博客 - iccxdgrfDocument58 pagesIC Compiler IIICC II后端设计流程超详细 - 凳子花的博客-CSDN博客 - iccxdgrfRAZNo ratings yet
- Readme PDFDocument5 pagesReadme PDFRyan Reas100% (1)
- Efficient C Coding For AVRDocument15 pagesEfficient C Coding For AVRapi-3740925No ratings yet
- Project 2012fallDocument5 pagesProject 2012fallATHIRA V RNo ratings yet
- Co&a Unit 5Document24 pagesCo&a Unit 5Vivek DholeNo ratings yet
- RVCoreP An Optimized RISC-V Soft Processor of Five-StageDocument10 pagesRVCoreP An Optimized RISC-V Soft Processor of Five-Stage吕治宽No ratings yet
- 6713 User ManualDocument92 pages6713 User Manualsningle100% (1)
- D.S.P/MATLAB Theory & ExperimentsDocument57 pagesD.S.P/MATLAB Theory & ExperimentsNandagopal Sivakumar50% (4)
- RD2kit Examples enDocument14 pagesRD2kit Examples enLim Yoon-hwanNo ratings yet
- Lecture Notes-Computer Architecture-Module 1Document20 pagesLecture Notes-Computer Architecture-Module 1mokshagnanare26No ratings yet
- Lec 2,3,4Document48 pagesLec 2,3,4Yatharth AnandNo ratings yet
- A Framework For The Design of High Speed Fir Filters On FpgasDocument4 pagesA Framework For The Design of High Speed Fir Filters On Fpgasamit1411narkhedeNo ratings yet
- Thesis Fpga ImplementationDocument6 pagesThesis Fpga Implementationjessicabriggsomaha100% (2)
- Talk Gatech Ixp 2002Document30 pagesTalk Gatech Ixp 2002larryshiNo ratings yet
- Assigning Cpu For AppliactionDocument7 pagesAssigning Cpu For AppliactionSaahil ShahNo ratings yet
- Shree Ramchandra College of Engineering: Lab ManualDocument64 pagesShree Ramchandra College of Engineering: Lab ManualTrang NguyễnNo ratings yet
- EIE411 - Instruction Set Architecture - Part 1 For 202021Document67 pagesEIE411 - Instruction Set Architecture - Part 1 For 202021InyeneNo ratings yet
- Soc11 Leon TutorialDocument12 pagesSoc11 Leon TutorialBonnie ThompsonNo ratings yet
- DPDKDocument10 pagesDPDKGabriel FrancischiniNo ratings yet
- VST Case StudyDocument9 pagesVST Case StudyBobby NelsonNo ratings yet
- PicDocument71 pagesPicSanthosh SachithananthamNo ratings yet
- IOTDocument29 pagesIOTdvdreadsNo ratings yet
- Computer Laboratory Manual1Document58 pagesComputer Laboratory Manual1Muhammad Talha AtharNo ratings yet
- Unit 5 PDFDocument21 pagesUnit 5 PDFShifanilaNo ratings yet
- Pals - Investigation Slides (Team Rickygirls)Document10 pagesPals - Investigation Slides (Team Rickygirls)Adrian Andres Santiago MaciasNo ratings yet
- Performance and Overhead in A Hybrid Reconfigurable ComputerDocument8 pagesPerformance and Overhead in A Hybrid Reconfigurable ComputerHarish MudimelaNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Small DC Motor Control by PWM Method Using Atmega8Document4 pagesSmall DC Motor Control by PWM Method Using Atmega8Emin KültürelNo ratings yet
- 4x4 Matrix Key-Board Interfacing With ATmega32Document6 pages4x4 Matrix Key-Board Interfacing With ATmega32Emin Kültürel100% (1)
- Circuit Schematic LiPo Battery Charger Using LM324 ICDocument3 pagesCircuit Schematic LiPo Battery Charger Using LM324 ICEmin Kültürel0% (1)
- EE 109 Unit 10 - Pulse Width ModulationDocument16 pagesEE 109 Unit 10 - Pulse Width ModulationEmin KültürelNo ratings yet
- EE 109 Unit 18 - Noise Margins, Interfacing, and Tri-StatesDocument22 pagesEE 109 Unit 18 - Noise Margins, Interfacing, and Tri-StatesEmin KültürelNo ratings yet
- Real Timer Using Microcontroller ATME8535Document4 pagesReal Timer Using Microcontroller ATME8535Emin KültürelNo ratings yet
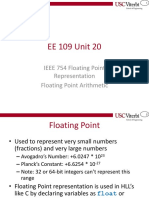
- EE 109 Unit 20: IEEE 754 Floating Point Representation Floating Point ArithmeticDocument31 pagesEE 109 Unit 20: IEEE 754 Floating Point Representation Floating Point ArithmeticEmin KültürelNo ratings yet
- Introduction To Computer Science-1Document46 pagesIntroduction To Computer Science-1Emin KültürelNo ratings yet
- Unit 8 - RecursionDocument16 pagesUnit 8 - RecursionEmin KültürelNo ratings yet
- Lecture5 Data Stuctures AlgorithmsDocument53 pagesLecture5 Data Stuctures AlgorithmsEmin KültürelNo ratings yet
- EE109Unit18 NoiseMarginCMOS NotesDocument7 pagesEE109Unit18 NoiseMarginCMOS NotesEmin KültürelNo ratings yet
- Lecture11 Abstract Machines TheoryDocument40 pagesLecture11 Abstract Machines TheoryEmin KültürelNo ratings yet
- Newbies Guide To Avr Timers-10Document18 pagesNewbies Guide To Avr Timers-10Emin KültürelNo ratings yet
- Accessing The EEPROMDocument12 pagesAccessing The EEPROMEmin KültürelNo ratings yet
- Voltage Supervisory Circuit With TL7705Document1 pageVoltage Supervisory Circuit With TL7705Emin KültürelNo ratings yet
- Ebco StockDocument7 pagesEbco StockVIKAS KUMARNo ratings yet
- Admin GuideDocument102 pagesAdmin Guidersans0902245No ratings yet
- Medieval Furniture Derevyannoe KruzhevoDocument204 pagesMedieval Furniture Derevyannoe KruzhevoIrvin Jovani Torres Magaña100% (4)
- All of Paris, Darkly Le Corbusier's Beistegui Apartment, 1929-1931Document15 pagesAll of Paris, Darkly Le Corbusier's Beistegui Apartment, 1929-1931EdwardSunNo ratings yet
- 110 2002Document8 pages110 2002phibetNo ratings yet
- What Is SS7 Protocol - Telecommunication InformationDocument2 pagesWhat Is SS7 Protocol - Telecommunication InformationlllollooNo ratings yet
- Resume of ManikandanDocument2 pagesResume of Manikandanapi-26189087No ratings yet
- 19th Century Europe 2015 PrintDocument4 pages19th Century Europe 2015 PrintMJ CaballeroNo ratings yet
- Strumillo Krystyna 1780ostDocument8 pagesStrumillo Krystyna 1780ostNada NoomanNo ratings yet
- Profinet Design 8062 v114 Dec14Document34 pagesProfinet Design 8062 v114 Dec14ParamNo ratings yet
- Daily Top 10 Worst Cell Report - 2G & 3G: Date: 7-Dec-08Document8 pagesDaily Top 10 Worst Cell Report - 2G & 3G: Date: 7-Dec-08Bona RadiantoNo ratings yet
- Diversion of Sewer Drawing PDFDocument1 pageDiversion of Sewer Drawing PDFThomas ClarkNo ratings yet
- Glass Onion Visual Style: InstallationDocument3 pagesGlass Onion Visual Style: InstallationEna911No ratings yet
- Structural Drawings: Sl/Adb/St-CsDocument35 pagesStructural Drawings: Sl/Adb/St-Csharold romuald Lele FotsoNo ratings yet
- Coursera - Programming Mobile Apps AndroidDocument6 pagesCoursera - Programming Mobile Apps AndroidhtdvulNo ratings yet
- KMV Vivaan Villa BrochureDocument36 pagesKMV Vivaan Villa BrochureSatish V MadalaNo ratings yet
- EarlGrey IOS AutomationDocument14 pagesEarlGrey IOS AutomationSatadip GhoshNo ratings yet
- Dexpot QuickstartguideDocument14 pagesDexpot QuickstartguideRonald MaldonadoNo ratings yet
- HUAWEI E5172As 22 LTE CPE Product Description PDFDocument38 pagesHUAWEI E5172As 22 LTE CPE Product Description PDFsmarcov1No ratings yet
- Parapet DetailDocument1 pageParapet DetailRimon GawandeNo ratings yet
- Developments in Formwork: Larsen & Toubro LimitedDocument83 pagesDevelopments in Formwork: Larsen & Toubro LimitedRavi RajanNo ratings yet
- TBC PentestDocument9 pagesTBC PentestJam Tangan BrandedNo ratings yet
- Out Put Details and ExamplesDocument208 pagesOut Put Details and ExamplesLucio100No ratings yet
- CarrierDocument190 pagesCarrierMat Ki100% (1)
- ASEM2M Iridium SBD Developers GuideDocument59 pagesASEM2M Iridium SBD Developers Guidekira019No ratings yet
- X DfjytkDocument14 pagesX Dfjytkshreya chavanNo ratings yet
- PWD Training Report CivilDocument24 pagesPWD Training Report CivilKushal 00725% (4)