
Smart Reverse Parking Using Raspberry PI
Smart Reverse Parking Using Raspberry PI
You might also like
- GSP9702 and GSP9712 Service Manual: Form 4283T, 05-07 Supersedes Form 4283T, 05-06Document120 pagesGSP9702 and GSP9712 Service Manual: Form 4283T, 05-07 Supersedes Form 4283T, 05-06salvador_mendoza_3100% (1)
- Principles of ManagementDocument29 pagesPrinciples of ManagementAviralAlokNo ratings yet
- Smart ParkingDocument23 pagesSmart Parkingsriku519100% (1)
- GX 600 Manual PDFDocument10 pagesGX 600 Manual PDFKevinNo ratings yet
- Ijarece Vol 6 Issue 6 590 593 PDFDocument4 pagesIjarece Vol 6 Issue 6 590 593 PDFsachin yadavNo ratings yet
- An Intelligent Traffic Light System Based On Piezo-Electric SensorsDocument4 pagesAn Intelligent Traffic Light System Based On Piezo-Electric SensorsAlamelurajasree SNo ratings yet
- Parking Availability Indication System UDocument4 pagesParking Availability Indication System UEzzedine ShlibkNo ratings yet
- Iot Based Bridge Health Smart Monitoring System IJERTCONV8IS11025Document3 pagesIot Based Bridge Health Smart Monitoring System IJERTCONV8IS11025Saurav SagarNo ratings yet
- VR Based Tele-Presence Robot Using Raspberry PiDocument6 pagesVR Based Tele-Presence Robot Using Raspberry PiIJRASETPublicationsNo ratings yet
- Automatic Solar Grass CutterDocument4 pagesAutomatic Solar Grass CutterLoveable Ajith0% (1)
- IOT Based Flood Monitoring and Alerting SystemDocument9 pagesIOT Based Flood Monitoring and Alerting SystemIJRASETPublicationsNo ratings yet
- Vehicle Parking by IotDocument42 pagesVehicle Parking by IotSangita vaddepalliNo ratings yet
- Final Year Project PDFDocument26 pagesFinal Year Project PDFNilayan SamantaNo ratings yet
- MiniprojectDocument15 pagesMiniprojectrohith gombeNo ratings yet
- Smart Dustbin With IOTDocument10 pagesSmart Dustbin With IOTIJRASETPublicationsNo ratings yet
- Smart Car Parking System Using IR SensorDocument5 pagesSmart Car Parking System Using IR SensorIJRASETPublicationsNo ratings yet
- Density Based Traffic Light Control Using IR Sensors and ArduinoDocument9 pagesDensity Based Traffic Light Control Using IR Sensors and ArduinoIJRASETPublicationsNo ratings yet
- Solar Operated Metal Detector Robot Based On GSMDocument4 pagesSolar Operated Metal Detector Robot Based On GSMIJIRSTNo ratings yet
- Automatic Speed Control Based On IotDocument5 pagesAutomatic Speed Control Based On IotDhruva CasNo ratings yet
- Cloud Based Smart Dustbin For Metro Stations: A Technical Seminar Report OnDocument17 pagesCloud Based Smart Dustbin For Metro Stations: A Technical Seminar Report OnAj NethaNo ratings yet
- Final Year Project Proposal-1Document10 pagesFinal Year Project Proposal-1monaNo ratings yet
- Microcontroller Based Automatic GateDocument12 pagesMicrocontroller Based Automatic GateAndyNo ratings yet
- Obstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoDocument5 pagesObstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoRichard Kaven SerquinaNo ratings yet
- Underground Cable Fault Detection Using Iot IJERTV11IS060285Document4 pagesUnderground Cable Fault Detection Using Iot IJERTV11IS060285Rathod ArjunNo ratings yet
- IoT Based Antenna Positioning SystemDocument9 pagesIoT Based Antenna Positioning SystemIJRASETPublicationsNo ratings yet
- Length Calculator Using Ultrasonic Sensor and Raspberry Pi With Android AppDocument4 pagesLength Calculator Using Ultrasonic Sensor and Raspberry Pi With Android AppGayuh W.NNo ratings yet
- REPORTphase 1Document17 pagesREPORTphase 1Suchitha Vijay kumarNo ratings yet
- Modern IoT Based Gardening SystemDocument7 pagesModern IoT Based Gardening SystemIJRASETPublicationsNo ratings yet
- A On Iot Based Smart Parking System Electronics and Communication EngineeringDocument8 pagesA On Iot Based Smart Parking System Electronics and Communication Engineeringrahul psitNo ratings yet
- E-Smart Bin Technology & Waste Segregation SystemDocument4 pagesE-Smart Bin Technology & Waste Segregation Systemvenkata sai gireesh pNo ratings yet
- CNC Machine Based On Laser Engraver Using Arduino UNODocument4 pagesCNC Machine Based On Laser Engraver Using Arduino UNOIJSTE100% (1)
- ContinueDocument10 pagesContinueNouman KhalidNo ratings yet
- Car Parking Sensor Using 8051 MicrocontrDocument3 pagesCar Parking Sensor Using 8051 MicrocontrKollu TharunkumarNo ratings yet
- A Car Parking Guard Circuit Using InfrarDocument12 pagesA Car Parking Guard Circuit Using InfrarAliNo ratings yet
- Advanced Automatic Self Car Parking Using ArduinoDocument5 pagesAdvanced Automatic Self Car Parking Using Arduinoعمل الخيرNo ratings yet
- Remote Area Monitoring RobotDocument5 pagesRemote Area Monitoring RobotIJSTENo ratings yet
- Iarjset 2021 8714Document4 pagesIarjset 2021 8714Amit KumarNo ratings yet
- LIS 2022 New 1-195-201Document7 pagesLIS 2022 New 1-195-201Lppm Politeknik JambiNo ratings yet
- GSM Based Smart Energy Meter Using Raspberry PIDocument6 pagesGSM Based Smart Energy Meter Using Raspberry PIIJRASETPublicationsNo ratings yet
- Low Cost Iot Based Mini Inverter: (Peer-Reviewed, Open Access, Fully Refereed International Journal)Document9 pagesLow Cost Iot Based Mini Inverter: (Peer-Reviewed, Open Access, Fully Refereed International Journal)georgeNo ratings yet
- 2-1 MergedDocument23 pages2-1 Mergedvishalpawar050No ratings yet
- Arduino Based Automatic Car Parking Empty Slots Detection: - Volume 9, Issue 8, August 2020Document5 pagesArduino Based Automatic Car Parking Empty Slots Detection: - Volume 9, Issue 8, August 2020عمل الخيرNo ratings yet
- IOT Based Electrical Energy Monitoring in A Domestic AppliancesDocument6 pagesIOT Based Electrical Energy Monitoring in A Domestic AppliancesIJRASETPublicationsNo ratings yet
- Smart Garbage Management System IJERTV4IS031175Document4 pagesSmart Garbage Management System IJERTV4IS031175LuckyDon 1999No ratings yet
- An IoT Based Obstacle Avoidance Robot Using UltrasDocument7 pagesAn IoT Based Obstacle Avoidance Robot Using UltrasaarekelaNo ratings yet
- Reverse Parking Sensor: IarjsetDocument3 pagesReverse Parking Sensor: Iarjsetعمل الخيرNo ratings yet
- Batch4 InternalDocument25 pagesBatch4 InternalEssu KandulaNo ratings yet
- E11870275S19Document7 pagesE11870275S19dhanu suriyaNo ratings yet
- Wireless Flex Sensor Based RobotDocument4 pagesWireless Flex Sensor Based RobotIJSTENo ratings yet
- Solar Monitoring Using Iot: Karpagam College of Engineering, CoimbatoreDocument4 pagesSolar Monitoring Using Iot: Karpagam College of Engineering, Coimbatoreali alasdyNo ratings yet
- Report DKDocument40 pagesReport DKsp9488366No ratings yet
- BCIPECH-2022 Paper 7075Document3 pagesBCIPECH-2022 Paper 7075AaNo ratings yet
- Smart Car Parking System Using Arduino UNODocument8 pagesSmart Car Parking System Using Arduino UNOIJRASETPublicationsNo ratings yet
- Iotbasedtransmissionlinefault PDFDocument5 pagesIotbasedtransmissionlinefault PDFsanjay ANo ratings yet
- Density Based Traffic Light ControlDocument6 pagesDensity Based Traffic Light ControlVIVA-TECH IJRINo ratings yet
- Frictionless Bearing TSDocument16 pagesFrictionless Bearing TS4MH18CS086 Rakesh Mallika SNo ratings yet
- Mini Project SrihariDocument14 pagesMini Project SrihariAshik GRNo ratings yet
- Smart Dustbin Using ArdunioDocument9 pagesSmart Dustbin Using ArdunioIJRASETPublicationsNo ratings yet
- Parking Management For College CampusDocument4 pagesParking Management For College CampusIJSTENo ratings yet
- Smart Parking Solution For Smart Cities Using ArduinoDocument9 pagesSmart Parking Solution For Smart Cities Using ArduinoIJRASETPublicationsNo ratings yet
- Car Parking System Using Iot and A IDocument8 pagesCar Parking System Using Iot and A Ishubhamnalawade2019No ratings yet
- Smart Fuel and Vehicle Theft Identification by Using IoTDocument4 pagesSmart Fuel and Vehicle Theft Identification by Using IoTInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Three Dimensional System Integration: IC Stacking Process and DesignFrom EverandThree Dimensional System Integration: IC Stacking Process and DesignNo ratings yet
- Partial Replacement of Fine Aggregate With Iron Ore Tailings and Glass PowderDocument7 pagesPartial Replacement of Fine Aggregate With Iron Ore Tailings and Glass PowderIJSTENo ratings yet
- Design and Analysis of Magneto Repulsive Wind TurbineDocument7 pagesDesign and Analysis of Magneto Repulsive Wind TurbineIJSTENo ratings yet
- Effect of RIB Orientation in Isogrid Structures: Aerospace ApplicationsDocument9 pagesEffect of RIB Orientation in Isogrid Structures: Aerospace ApplicationsIJSTENo ratings yet
- Development of Relationship Between Saturation Flow and Capacity of Mid Block Section of Urban Road - A Case Study of Ahmedabad CityDocument6 pagesDevelopment of Relationship Between Saturation Flow and Capacity of Mid Block Section of Urban Road - A Case Study of Ahmedabad CityIJSTENo ratings yet
- A Mixture of Experts Model For ExtubationDocument4 pagesA Mixture of Experts Model For ExtubationIJSTENo ratings yet
- An Implementation and Design A Customized Advanced Image Editor Using Image Processing in MatlabDocument5 pagesAn Implementation and Design A Customized Advanced Image Editor Using Image Processing in MatlabIJSTENo ratings yet
- An Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemDocument5 pagesAn Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemIJSTENo ratings yet
- Onerider The Bike TaxiDocument3 pagesOnerider The Bike TaxiIJSTENo ratings yet
- Using The Touch-Screen Images For Password-Based Authentication of IlliteratesDocument6 pagesUsing The Touch-Screen Images For Password-Based Authentication of IlliteratesIJSTENo ratings yet
- Wireless Information Process and Power Transfer in Single-User OFDM SystemDocument6 pagesWireless Information Process and Power Transfer in Single-User OFDM SystemIJSTENo ratings yet
- Technology Advancement For Abled PersonDocument9 pagesTechnology Advancement For Abled PersonIJSTENo ratings yet
- Duplicate Detection Using AlgorithmsDocument3 pagesDuplicate Detection Using AlgorithmsIJSTENo ratings yet
- Research On Storage Privacy Via Black Box and Sanitizable SignatureDocument6 pagesResearch On Storage Privacy Via Black Box and Sanitizable SignatureIJSTENo ratings yet
- An Implementation of Matlab Based Platform For The Evaluation of Modulation Techniques Using Multiuser MIMO-OFDM For Visible Light Communications Using MatlabDocument5 pagesAn Implementation of Matlab Based Platform For The Evaluation of Modulation Techniques Using Multiuser MIMO-OFDM For Visible Light Communications Using MatlabIJSTENo ratings yet
- Study On The Properties of Aerated Concrete Incorporating Fly Ash and Rubber PowderDocument6 pagesStudy On The Properties of Aerated Concrete Incorporating Fly Ash and Rubber PowderIJSTENo ratings yet
- Privacy Preserving: Slicer Based SchemeDocument3 pagesPrivacy Preserving: Slicer Based SchemeIJSTENo ratings yet
- Coupled Shear Wall: A ReviewDocument2 pagesCoupled Shear Wall: A ReviewIJSTE100% (1)
- Brochure Network Optix nx1 004Document4 pagesBrochure Network Optix nx1 004Mihai PavelescuNo ratings yet
- Orcad Capture and PspiceDocument25 pagesOrcad Capture and PspiceabhinandNo ratings yet
- User Interface and User Experience For Virtual Reality Using Biopotential: A Virtual Reality System With Cross Platform and Plug-and-Play CapabilityDocument5 pagesUser Interface and User Experience For Virtual Reality Using Biopotential: A Virtual Reality System With Cross Platform and Plug-and-Play CapabilityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ARO 666250 XXX C 2 Inch Metallic Diaphragm Pump ManualDocument8 pagesARO 666250 XXX C 2 Inch Metallic Diaphragm Pump Manualroyert80No ratings yet
- Manual P49G V1Document45 pagesManual P49G V1Natália Rocha100% (1)
- User Manual FOR Download ManagerDocument18 pagesUser Manual FOR Download ManagerSava RadoNo ratings yet
- Grundfosliterature 6153682Document16 pagesGrundfosliterature 6153682f.molinarisNo ratings yet
- STUdENT RefgistationDocument19 pagesSTUdENT RefgistationAnkit KomarNo ratings yet
- Brochure Bizhub 420Document8 pagesBrochure Bizhub 420Vlad Carolina NicoletaNo ratings yet
- Bachmann Campaign Grand Jury SubpoenaDocument12 pagesBachmann Campaign Grand Jury SubpoenaShabbosgoyNo ratings yet
- Report On Practical Attachment in Computer Science by Tigistu WogayehuDocument32 pagesReport On Practical Attachment in Computer Science by Tigistu Wogayehutigistu wogayehu tigeNo ratings yet
- AR9281 WirelessCardBulletinDocument2 pagesAR9281 WirelessCardBulletintrebz36No ratings yet
- Advanced Troubleshooting of The ASR1k and ISR (Including SDWAN Edge) Made EasyDocument237 pagesAdvanced Troubleshooting of The ASR1k and ISR (Including SDWAN Edge) Made EasyvsvsvdvdNo ratings yet
- Session 10 - AMBA-busDocument35 pagesSession 10 - AMBA-busSai Mohnish MuralidharanNo ratings yet
- VOLTAGE DROP Testing Overview and Lab SheetDocument6 pagesVOLTAGE DROP Testing Overview and Lab SheetSabastian Edwards100% (1)
- Final ReportDocument19 pagesFinal ReportBasit KhanNo ratings yet
- BROSUR TERBARU KLIK WEB: WWW - Madyacomputer.co - IdDocument2 pagesBROSUR TERBARU KLIK WEB: WWW - Madyacomputer.co - IdFazal Akwan AtaNo ratings yet
- Chef For Absolute BeginnersDocument7 pagesChef For Absolute BeginnersKarthik ReddyNo ratings yet
- Keyboard/Display Controller - Intel 8279Document16 pagesKeyboard/Display Controller - Intel 8279Anamika singhNo ratings yet
- Hydrins2 0510ukDocument4 pagesHydrins2 0510uklwarlocklNo ratings yet
- Daikin Si50-203Document51 pagesDaikin Si50-203Aliey AliNo ratings yet
- Mikrotik Router SetupDocument14 pagesMikrotik Router SetupAlisya GunawanNo ratings yet
- Placa de Baza Athlon m7mkbDocument79 pagesPlaca de Baza Athlon m7mkbgilmeanualexmihaiNo ratings yet
- Eng CD T Fit 2 12x AlDocument27 pagesEng CD T Fit 2 12x Alkkpatel87No ratings yet
- T-Flex CadDocument33 pagesT-Flex CadWilhelm ThorleyNo ratings yet
- RVGL Changelog PDFDocument43 pagesRVGL Changelog PDFyiditNo ratings yet
- Challenges in Grid ComputingDocument4 pagesChallenges in Grid ComputingijsretNo ratings yet









































































































IJSTE - International Journal of Science Technology & Engineering | Volume 3 | Issue 07 | January 2017
ISSN (online): 2349-784X
Smart Reverse Parking using Raspberry PI
Mrs. Michelle Araujo e Viegas Mr. Zain Rajani
Head of Department UG student
Department of Electronics & Telecommunication Department of Electronics & Telecommunication
Engineering Engineering
Don Bosco College of Engineering Don Bosco College of Engineering
Ms. Valerie Vaz Ms. Jyoti Kumari
UG student UG student
Department of Electronics & Telecommunication Department of Electronics & Telecommunication
Engineering Engineering
Don Bosco College of Engineering Don Bosco College of Engineering
Ms. Vismita Kolvekar
UG student
Department of Electronics & Telecommunication Engineering
Don Bosco College of Engineering
Abstract
This paper aims at providing a solution to the problem being caused for the drivers in reverse parking. Finding parking slot in
most metropolitan areas, especially during the rush hours, is difficult for the drivers. In this paper we not only propose a solution
for reverse parking but also help the drivers in identification of parking slots in areas where the number of vehicles are in large
numbers. This system makes use of improved techniques and also helps in automatic billing for pay and park services. The
system makes use of the ultrasonic sensor to calculate the time it remained in the parking area and then calculates the amount the
customer needs to pay before he leaves the parking area. The Raspberry Pi will act as brain to control this system which uses
Python programming language. This system is successfully implemented as prototype system.
Keywords: LED, Pay and Park System, Reverse Parking, Raspberry Pi, Ultrasonic Sensor
________________________________________________________________________________________________________
I. INTRODUCTION
Every year around 300 people are killed and 18000 are injured by drivers who are backing up, usually in driveways or parking
lots. When parking space available is tight or not sufficient in that reverse parking is used. Car is stopped ahead of available
parking lot and then it comes in reverse manner and is parked into the available space. Reverse parking is more convenient
because it can park car with minimum dimensions.
In previous years various method have been proposed such as the idea of using analog circuits such as potentiometers to
control the LED which indicates the distance between the object and the car but it was seen with a small change in the values of
the resistor the entire system can get disturbed and the calibration of the potentiometer is very difficult [1]. The circuit was
further improved using timer IC 555 [2] but the circuit still remained analog and the problem of adjustment of potentiometer still
persists. There are many works which discuss the T&T reverse parking problem.
In [3] and [4] the authors present a partially fuzzy approach and its analysis of stability. It is true that this approach is very
efficient, but what about the cases when we do not have the luxury of exact knowledge that is required for the non-fuzzy part of
the controller. In [5] authors have used a T & T model to present procedures for escaping from the jack knife situation that are
based on a hierarchy of two fuzzy controllers. One is used for reverse and one for forward drive control.
The system uses a smart microcomputer and ultrasonic sensor. The ultrasonic sensor is a distance measurement sensor which
uses ultrasonic waves. The speed for the ultrasonic waves is taken to be 1540 m/sec and using this and the time required for the
wave to go and come back to the sensor the distance is measured.
The prototype built for the system works in the following manner. The ultrasonic sensor sends a wave and if no car is present
then a green LED (Light Emitting Diode) lights up indicating two things firstly that the place is vacant and also tells the driver
that he can take a reverse easily. Depending upon the green LED the driver can go to the particular location and park his car.
Further while the driver is in a process of taking reverse a yellow LED glows up for him indicating that he is moving close but he
can take reverse as he is in the intermediate region if the car gets closer red LED tells him to stop and indicates to him that going
more in reverse may result in damaging his car which is also indicated using the buzzer.
All rights reserved by www.ijste.org 98
Smart Reverse Parking using Raspberry PI
(IJSTE/ Volume 3 / Issue 07 / 021)
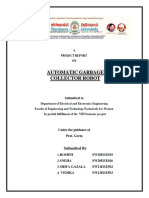
Fig. 1: Block Diagram for Reverse Parking
The ultrasonic gets its supply voltage from the Raspberry Pi to send the trigger to determine the distance. The distance is
measured using the elementary formula of speed and distance. The output that is being generated from the ultrasonic sensor is
higher than 3.3 V hence a potential divider is required to get this down to required voltage for the GPIO pins on the Raspberry Pi
hence for this purpose a simple potential divider circuit is used. Depending upon the distance measured the respective LED
glows on which helps the driver. The overview of the entire system is shown in Fig. 1.
II. HARDWARE REQUIREMENTS
Ultrasonic Sensor:
The sensor used for reverse parking is ultrasonic sensor. The Fig. 2 shows the description of ultrasonic sensor and the principle
of working of ultrasonic sensor. It has 4 pins called as VCC, Trigger, Echo and ground respectively.
Fig. 2: Principle of Ultrasonic Sensor
When ultrasonic waves are incident on the object, diffused reflection of the energy takes place over a wide solid angle which
might be as high as 180 degrees. Thus some fraction of the incident energy is reflected back to the transducer in the form of
echoes and is detected. The distance to the object (L) can then be calculated through the speed of ultrasonic waves (v) in the
medium by the relation, where,t is the time taken by the wave to reach back to the sensor and is the angle between the
horizontal and the path taken as shown in the Fig. 3.
Fig. 3: Calculation of distance
All rights reserved by www.ijste.org 99
Smart Reverse Parking using Raspberry PI
(IJSTE/ Volume 3 / Issue 07 / 021)
III. CIRCUIT DESIGN
The inputs for this system are from the ultrasonic sensor and depending upon the distance being received after the calculation
from the Raspberry Pi the LED glows on. Fig. 6 shows the circuit connection for the ultrasonic sensor.
Fig. 6: Ultrasonic Sensor Circuit
The circuit is simple to implement and all the output in this case are digital, only a resistor value needs to be decided to get the
voltage for the GPIO pins to avoid any damage. In addition to this circuit also an LED circuit is connected for the LED to glow
on.
IV. ALGORITHM AND FLOWCHART
Fig. 7:
All rights reserved by www.ijste.org 100
Smart Reverse Parking using Raspberry PI
(IJSTE/ Volume 3 / Issue 07 / 021)
The Fig. 7 shows the entire procedure for the system and Fig. 8 shows how the cost is calculated for the pay and park system.
1) Step 1: Start
2) Step 2: Initialize Raspberry Pi
3) Step 3: Establish a connection between Raspberry Pi and computer using PuTTY
4) Step 4: Connect the circuit as per the circuit diagram for range sensor
5) Step 5: Measure the range between the wall and the car
6) Step 6: If the distance is greater than 15 cm indicate using a green LED
7) Step 7: If the distance is between the ranges of 10-15 cm indicate using a yellow LED
8) Step 8: If the distance is below 10 cm indicate a danger zone using red LED
9) Step 9: Jump to step 4 and loop continuously until system stops
10) Step 10: End
Fig. 8: Pay and Park system
V. RESULTS AND DISCUSSION
The project was aimed providing a simple and much efficient way for reverse parking in any situation.The first thing for this
project is to make all the input and output ready.
Fig. 9: Circuit Implementation
All rights reserved by www.ijste.org 101
Smart Reverse Parking using Raspberry PI
(IJSTE/ Volume 3 / Issue 07 / 021)
The Fig. 9 shows the circuit that was implemented for this practical purpose. It was implemented and works as expected and
has proved to be very useful and will fulfill all the present constraints if implemented on a large scale. In circuit shown in Fig. 10
the green LED is shown glowing as the space is vacant and no car is in danger zone of parking area.
The Raspberry Pi controls the LEDs depending upon the distance it measures. The last LED which is the red LED goes OFF
after a delay of 5 seconds assuming that the car will immediately stop on the red LED and the timer then starts and continues to
run till the car is not moved from the parking slot.
VI. CONCLUSION
This paper provides a design for reverse parking system in automobile. When the cars approach the wall and the distance keeps
on decreasing between the wall and the car then appropriate LED goes on for the car that enters in the danger zone and buzzer
turns on to indicate that car is almost near the wall. The ultrasonic sensor measures the distance with an average error percentage
of 0.05%. The paper provides a efficient way to measure the distance between any two cars while the car is driving. This paper
finds its application in cities where parking is a great problem and also could be used so that car is properly parked in the given
slot so that it doesnt occupy the parking space of two cars which results in efficient utilisation of parking space. This system can
be used in malls where the cars are parked. These also reduce the human effort involved in car parking and pay and park system.
Since sensors and system generates digital outputs which makes the installation of the system cheap and efficient. This system
was built with the aim that it could be installed in the cars and letting the driver know if he is moving very close to the car ahead
of him inorder to avoid collision.
REFERENCES
[1] http://circuitdigest.com/electronic-circuits/reverse-car-parking-circuit
[2] http://www.electronicshub.org/reverse-parking-sensor-circuit
[3] K. Tanaka, T. Taniguchi, H.O. Wang, Fuzzy controller and observer design for backing control of a trailer-truck Eng. Appl. Artif. Intell., 10 (5) (1997), pp.
441452
[4] K. Tanaka, M. Sano, A robust stabilization problem of fuzzy control system and its application to backing up control of a truck-trailer, IEEE Trans. Fuzzy
Syst., 2 (2) (1994), pp. 119134
[5] C. Altafini, A. Speranzon, B. Wahlberg, A feedback control scheme for reversing a truck and trailer vehicle, IEEE Trans. Robot. Autom., 17 (6) (2001), pp.
915922
[6] http://www.raspberrypi.org
[7] Gandhi Priyanka R.,Shaikh Parvin G., Suryavanshi Nilaxi D., Abuwala Priyanka S, Multilevel Automated Car Parking with IR Security System,
International Journal for Scientific Research and Development , Vol. 3 Issue 2, 2015, pp. 249-252
All rights reserved by www.ijste.org 102
You might also like
- GSP9702 and GSP9712 Service Manual: Form 4283T, 05-07 Supersedes Form 4283T, 05-06Document120 pagesGSP9702 and GSP9712 Service Manual: Form 4283T, 05-07 Supersedes Form 4283T, 05-06salvador_mendoza_3100% (1)
- Principles of ManagementDocument29 pagesPrinciples of ManagementAviralAlokNo ratings yet
- Smart ParkingDocument23 pagesSmart Parkingsriku519100% (1)
- GX 600 Manual PDFDocument10 pagesGX 600 Manual PDFKevinNo ratings yet
- Ijarece Vol 6 Issue 6 590 593 PDFDocument4 pagesIjarece Vol 6 Issue 6 590 593 PDFsachin yadavNo ratings yet
- An Intelligent Traffic Light System Based On Piezo-Electric SensorsDocument4 pagesAn Intelligent Traffic Light System Based On Piezo-Electric SensorsAlamelurajasree SNo ratings yet
- Parking Availability Indication System UDocument4 pagesParking Availability Indication System UEzzedine ShlibkNo ratings yet
- Iot Based Bridge Health Smart Monitoring System IJERTCONV8IS11025Document3 pagesIot Based Bridge Health Smart Monitoring System IJERTCONV8IS11025Saurav SagarNo ratings yet
- VR Based Tele-Presence Robot Using Raspberry PiDocument6 pagesVR Based Tele-Presence Robot Using Raspberry PiIJRASETPublicationsNo ratings yet
- Automatic Solar Grass CutterDocument4 pagesAutomatic Solar Grass CutterLoveable Ajith0% (1)
- IOT Based Flood Monitoring and Alerting SystemDocument9 pagesIOT Based Flood Monitoring and Alerting SystemIJRASETPublicationsNo ratings yet
- Vehicle Parking by IotDocument42 pagesVehicle Parking by IotSangita vaddepalliNo ratings yet
- Final Year Project PDFDocument26 pagesFinal Year Project PDFNilayan SamantaNo ratings yet
- MiniprojectDocument15 pagesMiniprojectrohith gombeNo ratings yet
- Smart Dustbin With IOTDocument10 pagesSmart Dustbin With IOTIJRASETPublicationsNo ratings yet
- Smart Car Parking System Using IR SensorDocument5 pagesSmart Car Parking System Using IR SensorIJRASETPublicationsNo ratings yet
- Density Based Traffic Light Control Using IR Sensors and ArduinoDocument9 pagesDensity Based Traffic Light Control Using IR Sensors and ArduinoIJRASETPublicationsNo ratings yet
- Solar Operated Metal Detector Robot Based On GSMDocument4 pagesSolar Operated Metal Detector Robot Based On GSMIJIRSTNo ratings yet
- Automatic Speed Control Based On IotDocument5 pagesAutomatic Speed Control Based On IotDhruva CasNo ratings yet
- Cloud Based Smart Dustbin For Metro Stations: A Technical Seminar Report OnDocument17 pagesCloud Based Smart Dustbin For Metro Stations: A Technical Seminar Report OnAj NethaNo ratings yet
- Final Year Project Proposal-1Document10 pagesFinal Year Project Proposal-1monaNo ratings yet
- Microcontroller Based Automatic GateDocument12 pagesMicrocontroller Based Automatic GateAndyNo ratings yet
- Obstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoDocument5 pagesObstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoRichard Kaven SerquinaNo ratings yet
- Underground Cable Fault Detection Using Iot IJERTV11IS060285Document4 pagesUnderground Cable Fault Detection Using Iot IJERTV11IS060285Rathod ArjunNo ratings yet
- IoT Based Antenna Positioning SystemDocument9 pagesIoT Based Antenna Positioning SystemIJRASETPublicationsNo ratings yet
- Length Calculator Using Ultrasonic Sensor and Raspberry Pi With Android AppDocument4 pagesLength Calculator Using Ultrasonic Sensor and Raspberry Pi With Android AppGayuh W.NNo ratings yet
- REPORTphase 1Document17 pagesREPORTphase 1Suchitha Vijay kumarNo ratings yet
- Modern IoT Based Gardening SystemDocument7 pagesModern IoT Based Gardening SystemIJRASETPublicationsNo ratings yet
- A On Iot Based Smart Parking System Electronics and Communication EngineeringDocument8 pagesA On Iot Based Smart Parking System Electronics and Communication Engineeringrahul psitNo ratings yet
- E-Smart Bin Technology & Waste Segregation SystemDocument4 pagesE-Smart Bin Technology & Waste Segregation Systemvenkata sai gireesh pNo ratings yet
- CNC Machine Based On Laser Engraver Using Arduino UNODocument4 pagesCNC Machine Based On Laser Engraver Using Arduino UNOIJSTE100% (1)
- ContinueDocument10 pagesContinueNouman KhalidNo ratings yet
- Car Parking Sensor Using 8051 MicrocontrDocument3 pagesCar Parking Sensor Using 8051 MicrocontrKollu TharunkumarNo ratings yet
- A Car Parking Guard Circuit Using InfrarDocument12 pagesA Car Parking Guard Circuit Using InfrarAliNo ratings yet
- Advanced Automatic Self Car Parking Using ArduinoDocument5 pagesAdvanced Automatic Self Car Parking Using Arduinoعمل الخيرNo ratings yet
- Remote Area Monitoring RobotDocument5 pagesRemote Area Monitoring RobotIJSTENo ratings yet
- Iarjset 2021 8714Document4 pagesIarjset 2021 8714Amit KumarNo ratings yet
- LIS 2022 New 1-195-201Document7 pagesLIS 2022 New 1-195-201Lppm Politeknik JambiNo ratings yet
- GSM Based Smart Energy Meter Using Raspberry PIDocument6 pagesGSM Based Smart Energy Meter Using Raspberry PIIJRASETPublicationsNo ratings yet
- Low Cost Iot Based Mini Inverter: (Peer-Reviewed, Open Access, Fully Refereed International Journal)Document9 pagesLow Cost Iot Based Mini Inverter: (Peer-Reviewed, Open Access, Fully Refereed International Journal)georgeNo ratings yet
- 2-1 MergedDocument23 pages2-1 Mergedvishalpawar050No ratings yet
- Arduino Based Automatic Car Parking Empty Slots Detection: - Volume 9, Issue 8, August 2020Document5 pagesArduino Based Automatic Car Parking Empty Slots Detection: - Volume 9, Issue 8, August 2020عمل الخيرNo ratings yet
- IOT Based Electrical Energy Monitoring in A Domestic AppliancesDocument6 pagesIOT Based Electrical Energy Monitoring in A Domestic AppliancesIJRASETPublicationsNo ratings yet
- Smart Garbage Management System IJERTV4IS031175Document4 pagesSmart Garbage Management System IJERTV4IS031175LuckyDon 1999No ratings yet
- An IoT Based Obstacle Avoidance Robot Using UltrasDocument7 pagesAn IoT Based Obstacle Avoidance Robot Using UltrasaarekelaNo ratings yet
- Reverse Parking Sensor: IarjsetDocument3 pagesReverse Parking Sensor: Iarjsetعمل الخيرNo ratings yet
- Batch4 InternalDocument25 pagesBatch4 InternalEssu KandulaNo ratings yet
- E11870275S19Document7 pagesE11870275S19dhanu suriyaNo ratings yet
- Wireless Flex Sensor Based RobotDocument4 pagesWireless Flex Sensor Based RobotIJSTENo ratings yet
- Solar Monitoring Using Iot: Karpagam College of Engineering, CoimbatoreDocument4 pagesSolar Monitoring Using Iot: Karpagam College of Engineering, Coimbatoreali alasdyNo ratings yet
- Report DKDocument40 pagesReport DKsp9488366No ratings yet
- BCIPECH-2022 Paper 7075Document3 pagesBCIPECH-2022 Paper 7075AaNo ratings yet
- Smart Car Parking System Using Arduino UNODocument8 pagesSmart Car Parking System Using Arduino UNOIJRASETPublicationsNo ratings yet
- Iotbasedtransmissionlinefault PDFDocument5 pagesIotbasedtransmissionlinefault PDFsanjay ANo ratings yet
- Density Based Traffic Light ControlDocument6 pagesDensity Based Traffic Light ControlVIVA-TECH IJRINo ratings yet
- Frictionless Bearing TSDocument16 pagesFrictionless Bearing TS4MH18CS086 Rakesh Mallika SNo ratings yet
- Mini Project SrihariDocument14 pagesMini Project SrihariAshik GRNo ratings yet
- Smart Dustbin Using ArdunioDocument9 pagesSmart Dustbin Using ArdunioIJRASETPublicationsNo ratings yet
- Parking Management For College CampusDocument4 pagesParking Management For College CampusIJSTENo ratings yet
- Smart Parking Solution For Smart Cities Using ArduinoDocument9 pagesSmart Parking Solution For Smart Cities Using ArduinoIJRASETPublicationsNo ratings yet
- Car Parking System Using Iot and A IDocument8 pagesCar Parking System Using Iot and A Ishubhamnalawade2019No ratings yet
- Smart Fuel and Vehicle Theft Identification by Using IoTDocument4 pagesSmart Fuel and Vehicle Theft Identification by Using IoTInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Three Dimensional System Integration: IC Stacking Process and DesignFrom EverandThree Dimensional System Integration: IC Stacking Process and DesignNo ratings yet
- Partial Replacement of Fine Aggregate With Iron Ore Tailings and Glass PowderDocument7 pagesPartial Replacement of Fine Aggregate With Iron Ore Tailings and Glass PowderIJSTENo ratings yet
- Design and Analysis of Magneto Repulsive Wind TurbineDocument7 pagesDesign and Analysis of Magneto Repulsive Wind TurbineIJSTENo ratings yet
- Effect of RIB Orientation in Isogrid Structures: Aerospace ApplicationsDocument9 pagesEffect of RIB Orientation in Isogrid Structures: Aerospace ApplicationsIJSTENo ratings yet
- Development of Relationship Between Saturation Flow and Capacity of Mid Block Section of Urban Road - A Case Study of Ahmedabad CityDocument6 pagesDevelopment of Relationship Between Saturation Flow and Capacity of Mid Block Section of Urban Road - A Case Study of Ahmedabad CityIJSTENo ratings yet
- A Mixture of Experts Model For ExtubationDocument4 pagesA Mixture of Experts Model For ExtubationIJSTENo ratings yet
- An Implementation and Design A Customized Advanced Image Editor Using Image Processing in MatlabDocument5 pagesAn Implementation and Design A Customized Advanced Image Editor Using Image Processing in MatlabIJSTENo ratings yet
- An Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemDocument5 pagesAn Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemIJSTENo ratings yet
- Onerider The Bike TaxiDocument3 pagesOnerider The Bike TaxiIJSTENo ratings yet
- Using The Touch-Screen Images For Password-Based Authentication of IlliteratesDocument6 pagesUsing The Touch-Screen Images For Password-Based Authentication of IlliteratesIJSTENo ratings yet
- Wireless Information Process and Power Transfer in Single-User OFDM SystemDocument6 pagesWireless Information Process and Power Transfer in Single-User OFDM SystemIJSTENo ratings yet
- Technology Advancement For Abled PersonDocument9 pagesTechnology Advancement For Abled PersonIJSTENo ratings yet
- Duplicate Detection Using AlgorithmsDocument3 pagesDuplicate Detection Using AlgorithmsIJSTENo ratings yet
- Research On Storage Privacy Via Black Box and Sanitizable SignatureDocument6 pagesResearch On Storage Privacy Via Black Box and Sanitizable SignatureIJSTENo ratings yet
- An Implementation of Matlab Based Platform For The Evaluation of Modulation Techniques Using Multiuser MIMO-OFDM For Visible Light Communications Using MatlabDocument5 pagesAn Implementation of Matlab Based Platform For The Evaluation of Modulation Techniques Using Multiuser MIMO-OFDM For Visible Light Communications Using MatlabIJSTENo ratings yet
- Study On The Properties of Aerated Concrete Incorporating Fly Ash and Rubber PowderDocument6 pagesStudy On The Properties of Aerated Concrete Incorporating Fly Ash and Rubber PowderIJSTENo ratings yet
- Privacy Preserving: Slicer Based SchemeDocument3 pagesPrivacy Preserving: Slicer Based SchemeIJSTENo ratings yet
- Coupled Shear Wall: A ReviewDocument2 pagesCoupled Shear Wall: A ReviewIJSTE100% (1)
- Brochure Network Optix nx1 004Document4 pagesBrochure Network Optix nx1 004Mihai PavelescuNo ratings yet
- Orcad Capture and PspiceDocument25 pagesOrcad Capture and PspiceabhinandNo ratings yet
- User Interface and User Experience For Virtual Reality Using Biopotential: A Virtual Reality System With Cross Platform and Plug-and-Play CapabilityDocument5 pagesUser Interface and User Experience For Virtual Reality Using Biopotential: A Virtual Reality System With Cross Platform and Plug-and-Play CapabilityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ARO 666250 XXX C 2 Inch Metallic Diaphragm Pump ManualDocument8 pagesARO 666250 XXX C 2 Inch Metallic Diaphragm Pump Manualroyert80No ratings yet
- Manual P49G V1Document45 pagesManual P49G V1Natália Rocha100% (1)
- User Manual FOR Download ManagerDocument18 pagesUser Manual FOR Download ManagerSava RadoNo ratings yet
- Grundfosliterature 6153682Document16 pagesGrundfosliterature 6153682f.molinarisNo ratings yet
- STUdENT RefgistationDocument19 pagesSTUdENT RefgistationAnkit KomarNo ratings yet
- Brochure Bizhub 420Document8 pagesBrochure Bizhub 420Vlad Carolina NicoletaNo ratings yet
- Bachmann Campaign Grand Jury SubpoenaDocument12 pagesBachmann Campaign Grand Jury SubpoenaShabbosgoyNo ratings yet
- Report On Practical Attachment in Computer Science by Tigistu WogayehuDocument32 pagesReport On Practical Attachment in Computer Science by Tigistu Wogayehutigistu wogayehu tigeNo ratings yet
- AR9281 WirelessCardBulletinDocument2 pagesAR9281 WirelessCardBulletintrebz36No ratings yet
- Advanced Troubleshooting of The ASR1k and ISR (Including SDWAN Edge) Made EasyDocument237 pagesAdvanced Troubleshooting of The ASR1k and ISR (Including SDWAN Edge) Made EasyvsvsvdvdNo ratings yet
- Session 10 - AMBA-busDocument35 pagesSession 10 - AMBA-busSai Mohnish MuralidharanNo ratings yet
- VOLTAGE DROP Testing Overview and Lab SheetDocument6 pagesVOLTAGE DROP Testing Overview and Lab SheetSabastian Edwards100% (1)
- Final ReportDocument19 pagesFinal ReportBasit KhanNo ratings yet
- BROSUR TERBARU KLIK WEB: WWW - Madyacomputer.co - IdDocument2 pagesBROSUR TERBARU KLIK WEB: WWW - Madyacomputer.co - IdFazal Akwan AtaNo ratings yet
- Chef For Absolute BeginnersDocument7 pagesChef For Absolute BeginnersKarthik ReddyNo ratings yet
- Keyboard/Display Controller - Intel 8279Document16 pagesKeyboard/Display Controller - Intel 8279Anamika singhNo ratings yet
- Hydrins2 0510ukDocument4 pagesHydrins2 0510uklwarlocklNo ratings yet
- Daikin Si50-203Document51 pagesDaikin Si50-203Aliey AliNo ratings yet
- Mikrotik Router SetupDocument14 pagesMikrotik Router SetupAlisya GunawanNo ratings yet
- Placa de Baza Athlon m7mkbDocument79 pagesPlaca de Baza Athlon m7mkbgilmeanualexmihaiNo ratings yet
- Eng CD T Fit 2 12x AlDocument27 pagesEng CD T Fit 2 12x Alkkpatel87No ratings yet
- T-Flex CadDocument33 pagesT-Flex CadWilhelm ThorleyNo ratings yet
- RVGL Changelog PDFDocument43 pagesRVGL Changelog PDFyiditNo ratings yet
- Challenges in Grid ComputingDocument4 pagesChallenges in Grid ComputingijsretNo ratings yet