Download as pdf or txt
You might also like
- Control 05Document27 pagesControl 05أحمد تركي كحيوشNo ratings yet
- Quasi-Continuous High-Order Sliding-Mode Controllers: of ToDocument6 pagesQuasi-Continuous High-Order Sliding-Mode Controllers: of ToMartín ReynosoNo ratings yet
- FALLSEM2014-15 CP0380 30-Oct-2014 RM01 IV Stability by LyapunovMethods UploadedDocument14 pagesFALLSEM2014-15 CP0380 30-Oct-2014 RM01 IV Stability by LyapunovMethods UploadedAkshay VijayanNo ratings yet
- Feedback Linearizing ControlDocument59 pagesFeedback Linearizing ControlLê Quốc ViệtNo ratings yet
- IEEE WorkShop Slides LavretskyDocument185 pagesIEEE WorkShop Slides LavretskyTu DuongNo ratings yet
- 2.3 Linear Approximation of Physical SystemsDocument3 pages2.3 Linear Approximation of Physical SystemsramNo ratings yet
- Nonlinear and Adaptive Control: Zhengtao DingDocument116 pagesNonlinear and Adaptive Control: Zhengtao DingAbdul Rehman TariqNo ratings yet
- d200401 501Document8 pagesd200401 501Sunil KumarNo ratings yet
- (12 - 2) Laplace Transform v2Document23 pages(12 - 2) Laplace Transform v2najla harzaNo ratings yet
- Topic 4 Describing Function PDFDocument101 pagesTopic 4 Describing Function PDFMeet VasaniNo ratings yet
- Nonlinear Rescaling of Control Laws With Application To Stabilization in The Presence of Magnitude SaturationDocument32 pagesNonlinear Rescaling of Control Laws With Application To Stabilization in The Presence of Magnitude SaturationMayank SethiNo ratings yet
- Nonlinear Matlab1Document15 pagesNonlinear Matlab1lisztNo ratings yet
- Nonlinear Control Lecture 7: Nonlinear Control System DesignDocument32 pagesNonlinear Control Lecture 7: Nonlinear Control System DesignChernet TugeNo ratings yet
- C025 AsymptoticStabilityFeedbackDelay 6thIEEE MedCCS98 Alghero OCRDocument6 pagesC025 AsymptoticStabilityFeedbackDelay 6thIEEE MedCCS98 Alghero OCRCostanzo ManesNo ratings yet
- System StabilityDocument16 pagesSystem Stabilityeugeni madaNo ratings yet
- Generic Hop F BifurcationDocument25 pagesGeneric Hop F BifurcationFernandoFierroGonzalezNo ratings yet
- The Z-Transform and Its ApplicationsDocument9 pagesThe Z-Transform and Its ApplicationsshakilNo ratings yet
- Nyquist Plot and Stability Criteria - GATE Study Material in PDFDocument7 pagesNyquist Plot and Stability Criteria - GATE Study Material in PDFSHRIVENKATESHANo ratings yet
- Adaptive Nonlinear ControlDocument40 pagesAdaptive Nonlinear Controlhossam majdoubNo ratings yet
- Lab7 1Document5 pagesLab7 1mishudev9No ratings yet
- EMJ37103 EMJ37504 - Digital Control System Part IIDocument12 pagesEMJ37103 EMJ37504 - Digital Control System Part IInewtonmama00No ratings yet
- Dissipative Nonlinear Systems Basic Properties and Stability AnalysisDocument6 pagesDissipative Nonlinear Systems Basic Properties and Stability AnalysisYangNo ratings yet
- CS Mod5@AzDOCUMENTS - inDocument16 pagesCS Mod5@AzDOCUMENTS - insssNo ratings yet
- Describing FunctionsDocument21 pagesDescribing FunctionsHildan Anwar IfaNo ratings yet
- About Robust Control On Nonlinear Chaotic Oscillators: Mihaela ClejuDocument5 pagesAbout Robust Control On Nonlinear Chaotic Oscillators: Mihaela ClejuBodoShowNo ratings yet
- Stability 2004Document4 pagesStability 2004andrestomasNo ratings yet
- One Application of Low-Pass Filter in With PL Action Sliding Mode Control SystemDocument5 pagesOne Application of Low-Pass Filter in With PL Action Sliding Mode Control Systemkarun213No ratings yet
- Esp411 Lecture12Document27 pagesEsp411 Lecture12Racquel Pauline LegaspiNo ratings yet
- Coordinate Descent Algorithms: Stephen J. WrightDocument32 pagesCoordinate Descent Algorithms: Stephen J. WrightAdrian GreenNo ratings yet
- Optimisation and Optimal ControlDocument26 pagesOptimisation and Optimal ControlRadhakrishnan V KNo ratings yet
- Nonlinear Control Systems - A Brief IntroductionDocument9 pagesNonlinear Control Systems - A Brief IntroductionSwapnil KanadeNo ratings yet
- Robust H output-feedback control of systems with time-delay: 夡 V. Suplin, U. ShakedDocument7 pagesRobust H output-feedback control of systems with time-delay: 夡 V. Suplin, U. ShakedRaminptNo ratings yet
- Sliding Mode Control Based On Observers For Uncertain Nonlinear SystemsDocument6 pagesSliding Mode Control Based On Observers For Uncertain Nonlinear SystemsWaj DINo ratings yet
- Nonlinear System Analysis and ControlDocument88 pagesNonlinear System Analysis and ControlElvis TsangNo ratings yet
- Chapter 4 Stability AnalysisDocument35 pagesChapter 4 Stability Analysis7014KANISHKA JAISWALNo ratings yet
- Stabilization of A Cascade-Connected Nonlinear System With An Input ConstraintDocument6 pagesStabilization of A Cascade-Connected Nonlinear System With An Input ConstraintSaeb AmirAhmadi ChomacharNo ratings yet
- Topic 10 Nonlinear Systems and Their LinearizationsDocument20 pagesTopic 10 Nonlinear Systems and Their LinearizationsMuhammad Salman AshrafNo ratings yet
- Control Technology: Department of Engineering TechnologyDocument55 pagesControl Technology: Department of Engineering TechnologyTaha AmerNo ratings yet
- Feedback Linearization and Driftless Systems: Philippe MARTIN Pierre ROUCHON November 1994, To Appear in MCSSDocument22 pagesFeedback Linearization and Driftless Systems: Philippe MARTIN Pierre ROUCHON November 1994, To Appear in MCSSRaúl CortésNo ratings yet
- Astrom ch7 PDFDocument18 pagesAstrom ch7 PDFSandra GilbertNo ratings yet
- Approximate Input-Output Linearization ofDocument6 pagesApproximate Input-Output Linearization ofzamzuri_rashidNo ratings yet
- Electronically Tunable Chaotic Oscillators Using OTA-C Derived From Jerk ModelDocument23 pagesElectronically Tunable Chaotic Oscillators Using OTA-C Derived From Jerk ModelKhunanon KarawanichNo ratings yet
- Z Transform PropertiesDocument12 pagesZ Transform Propertiesdebnathsuman49No ratings yet
- Control system-II: Department of Electrical EngineeringDocument17 pagesControl system-II: Department of Electrical Engineeringpala abishayNo ratings yet
- Investigations OscDocument26 pagesInvestigations Oscbecca3189No ratings yet
- Control Systems U3 (TEL306)Document84 pagesControl Systems U3 (TEL306)Ruvenderan SuburamaniamNo ratings yet
- Control System (Unit-3)Document38 pagesControl System (Unit-3)sravaniNo ratings yet
- Nonlinear Observer Based On Observable Cascade ForDocument10 pagesNonlinear Observer Based On Observable Cascade ForRuan JunNo ratings yet
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnNo ratings yet
- Linear Systems: Prof. Dr. João Edgar Chaves Filho Mestrado em Eng. ElétricaDocument55 pagesLinear Systems: Prof. Dr. João Edgar Chaves Filho Mestrado em Eng. ElétricaAlipio CarvalhoNo ratings yet
- Week 1Document31 pagesWeek 1salim ucarNo ratings yet
- Sufficient Conditions For Invariance ControlDocument6 pagesSufficient Conditions For Invariance Controllenoirstephane42No ratings yet
- STABILITY (Control System) : By-Vaibhav JindalDocument17 pagesSTABILITY (Control System) : By-Vaibhav JindalMunther MohdNo ratings yet
- 2 - Stability of Linear Control SystemsDocument34 pages2 - Stability of Linear Control SystemsHassan El SayedNo ratings yet
- Topic 3-Part 2-Frequency ResponseDocument54 pagesTopic 3-Part 2-Frequency ResponseBautista, Aljhon G.No ratings yet
- 3 Stability AnalysisDocument31 pages3 Stability Analysisanandlm710No ratings yet
- Process Control Matlab Exercise No. 8 Stability Analysis of Dynamic Systems 1. Objective: 2. Intended Learning Outcomes (Ilos)Document28 pagesProcess Control Matlab Exercise No. 8 Stability Analysis of Dynamic Systems 1. Objective: 2. Intended Learning Outcomes (Ilos)Krizzia Anne ShengNo ratings yet
- Transient & Steady State Response AnalysisDocument32 pagesTransient & Steady State Response AnalysisMisbah Sajid ChaudhryNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Undertaking Code of Conduct by StudentsDocument1 pageUndertaking Code of Conduct by StudentsKunalNo ratings yet
- Know All About-CLATDocument36 pagesKnow All About-CLATKunalNo ratings yet
- National Institute of Technology::Silchar 4th Semester B.Tech Mechanical Engg. EXTRA LOAD Tabulation Sheet, MAY 2018Document4 pagesNational Institute of Technology::Silchar 4th Semester B.Tech Mechanical Engg. EXTRA LOAD Tabulation Sheet, MAY 2018KunalNo ratings yet
- Bengaluru To Guwahati Ch42Qn: Indigo 6E-119Document2 pagesBengaluru To Guwahati Ch42Qn: Indigo 6E-119KunalNo ratings yet
- Guwahati To Bengaluru Pk6Umi: Air Asia I5-1983Document2 pagesGuwahati To Bengaluru Pk6Umi: Air Asia I5-1983KunalNo ratings yet
- Ticket 3441358762-1Document2 pagesTicket 3441358762-1KunalNo ratings yet
- Received With Thanks ' 14,115.00 Through Payment Gateway Over The Internet FromDocument1 pageReceived With Thanks ' 14,115.00 Through Payment Gateway Over The Internet FromKunalNo ratings yet
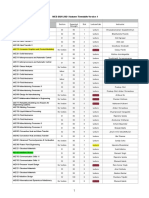
- B. Tech. Course Structure & Syllabus, Electrical Engineering Department, N.I.T. SilcharDocument55 pagesB. Tech. Course Structure & Syllabus, Electrical Engineering Department, N.I.T. SilcharKunalNo ratings yet
- Notice: National Institute of Technology SilcharDocument2 pagesNotice: National Institute of Technology SilcharKunalNo ratings yet
- National Institute of Technology Silchar 8Th Sem B.Tech Civil Engg. End Sem Tabulation Sheet, May-2019 (Provisional)Document6 pagesNational Institute of Technology Silchar 8Th Sem B.Tech Civil Engg. End Sem Tabulation Sheet, May-2019 (Provisional)KunalNo ratings yet
- National Institute of Technology Silchar B.Tech. 2nd Semester Tabulation (ELECTRICAL) 2017 Batch, Extra Load Exam Held in May 2019 (PROVISIONAL)Document1 pageNational Institute of Technology Silchar B.Tech. 2nd Semester Tabulation (ELECTRICAL) 2017 Batch, Extra Load Exam Held in May 2019 (PROVISIONAL)KunalNo ratings yet
- Received With Thanks ' 14,115.00 Through Payment Gateway Over The Internet FromDocument1 pageReceived With Thanks ' 14,115.00 Through Payment Gateway Over The Internet FromKunalNo ratings yet
- Applicant Name Application No. Course Receipt No Date Payment Mode Instrument No Bank SL No Description AmountDocument1 pageApplicant Name Application No. Course Receipt No Date Payment Mode Instrument No Bank SL No Description AmountKunalNo ratings yet
- Assign 3 FullDocument26 pagesAssign 3 FullKunalNo ratings yet
- National Institute of Technology::Silchar 4th Semester B.Tech Electrical Engg. End Sem Tabulation Sheet, May 2019 (Provisional)Document4 pagesNational Institute of Technology::Silchar 4th Semester B.Tech Electrical Engg. End Sem Tabulation Sheet, May 2019 (Provisional)KunalNo ratings yet
- V CurveDocument6 pagesV CurveKunalNo ratings yet
- What Is ConsciousnessDocument1 pageWhat Is ConsciousnessKunalNo ratings yet
- Intelligent Machining - Key TakeawaysDocument3 pagesIntelligent Machining - Key Takeawaysambika1969inNo ratings yet
- Database QuizDocument4 pagesDatabase QuizBlugh BeepNo ratings yet
- Smart Traffic Signal Control System (Documentaion) FinalDocument25 pagesSmart Traffic Signal Control System (Documentaion) FinalMr GAmerNo ratings yet
- Job Sequencing With The DeadlineDocument5 pagesJob Sequencing With The DeadlineAbhiNo ratings yet
- Training Manual For Management in Haramaya University by Admkew HaileDocument54 pagesTraining Manual For Management in Haramaya University by Admkew HaileAnonymous FK0GxUqUDtNo ratings yet
- CHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myDocument65 pagesCHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myhakita86No ratings yet
- EXP NO:07-a Date: Design of Fir Filter by Windowing TechniqueDocument15 pagesEXP NO:07-a Date: Design of Fir Filter by Windowing TechniquePoovarasanNo ratings yet
- Materi Seminar IATF-1Document63 pagesMateri Seminar IATF-1saiful arif nugrohoNo ratings yet
- IT MisDocument1 pageIT MisSh AvyNo ratings yet
- VisiLogic Software Manual-Function BlocksDocument194 pagesVisiLogic Software Manual-Function BlocksCristiano SoderNo ratings yet
- Com It e Expert Os Foody HealthDocument120 pagesCom It e Expert Os Foody HealthedgoitesNo ratings yet
- FMEA TemplateDocument33 pagesFMEA Templatemani01kandanNo ratings yet
- Exp 2 (Air Pressure Process Control)Document16 pagesExp 2 (Air Pressure Process Control)shafiqah wong100% (1)
- Object-Oriented Analysis and Design With UML2 and Rational Software ModelerDocument26 pagesObject-Oriented Analysis and Design With UML2 and Rational Software Modelerpranesh_patelNo ratings yet
- INF2009F Personal NotesDocument14 pagesINF2009F Personal NotesTshembho XivambuNo ratings yet
- Welcome To The Presentation Of: Simatic Pcs 7Document23 pagesWelcome To The Presentation Of: Simatic Pcs 7Patil Mohan100% (1)
- Low-Cost Microcontroller-Based Hover Control Design of A QuadcopterDocument7 pagesLow-Cost Microcontroller-Based Hover Control Design of A QuadcopterDanny AlejandroNo ratings yet
- Complexity - Construction in A New PerspectiveDocument12 pagesComplexity - Construction in A New PerspectiveAzhara Yudha PradiptaNo ratings yet
- R7311006-Process Control InstrumentationDocument4 pagesR7311006-Process Control InstrumentationsivabharathamurthyNo ratings yet
- DIGITAL CONTROL SYSTEMS Sept 2020Document8 pagesDIGITAL CONTROL SYSTEMS Sept 2020Polumuri RamanaNo ratings yet
- 1 - Agile MethodologiesDocument13 pages1 - Agile MethodologiesStar GoldNo ratings yet
- 498 FA2019 Lecture01Document61 pages498 FA2019 Lecture01S MahapatraNo ratings yet
- Inteligenta ArtificialaDocument4 pagesInteligenta ArtificialaBogdan TibrinNo ratings yet
- Data Science ProjectsDocument3 pagesData Science ProjectsHanane GríssetteNo ratings yet
- MED 2020-2021 Autumn Timetable Version 1: CourseDocument3 pagesMED 2020-2021 Autumn Timetable Version 1: CourseSagar ChiraniaNo ratings yet
- Ds 5Document21 pagesDs 5Saransh ShivhareNo ratings yet
- Deep Learning ModelsDocument21 pagesDeep Learning Modelssajid8887570788No ratings yet
- 6012 - Creating UPSC FormsDocument36 pages6012 - Creating UPSC FormsArijit DeyNo ratings yet
- Control System Lab (PC-EE-593/PC-EI 591)Document3 pagesControl System Lab (PC-EE-593/PC-EI 591)kbhowalNo ratings yet