
Vonellenrieder - Open Water Tow Tan.2010.SYMP
Vonellenrieder - Open Water Tow Tan.2010.SYMP
You might also like
- ABD Exam Prep PDFDocument45 pagesABD Exam Prep PDFBruno TelesNo ratings yet
- Testing and Commissioning of A Low-Speed (Incompressible), Subsonic, Transonic, andDocument7 pagesTesting and Commissioning of A Low-Speed (Incompressible), Subsonic, Transonic, andMj Santos100% (1)
- GrgtrhytjyjyDocument2 pagesGrgtrhytjyjyKushanNo ratings yet
- General Disclaimer One or More of The Following Statements May Affect This DocumentDocument14 pagesGeneral Disclaimer One or More of The Following Statements May Affect This DocumentUmair MunirNo ratings yet
- Experimental Investigation of Propeller Wake Velocity Field To Determine The Major Factors Affecting Propeller Wake WashDocument15 pagesExperimental Investigation of Propeller Wake Velocity Field To Determine The Major Factors Affecting Propeller Wake WashetqrgasdfgNo ratings yet
- Felli - Experimental Ana.2006.SYMPDocument8 pagesFelli - Experimental Ana.2006.SYMPIgnacio SantanaNo ratings yet
- Propeller in Vortex RingDocument16 pagesPropeller in Vortex Ringmondy.egNo ratings yet
- 15th Numerical Towing Tank Symposium PDFDocument223 pages15th Numerical Towing Tank Symposium PDFAnonymous mv84nhzNo ratings yet
- CFD WaterjetDocument8 pagesCFD WaterjettafocanNo ratings yet
- Asymmetric Behavior of Propeller-Rudder SystemDocument13 pagesAsymmetric Behavior of Propeller-Rudder Systemsumardiono10No ratings yet
- Hydrodynamic Performance of A Surfboard FinDocument4 pagesHydrodynamic Performance of A Surfboard FinWesley FernandesNo ratings yet
- Renewable Energy: Keum Soo Jeon, Jun Ik Jeong, Jae-Kyung Pan, Ki-Wahn RyuDocument10 pagesRenewable Energy: Keum Soo Jeon, Jun Ik Jeong, Jae-Kyung Pan, Ki-Wahn Ryuhasybi abiNo ratings yet
- Hossein+Nouroozi+i+1+in. PMRes 2020 1Document12 pagesHossein+Nouroozi+i+1+in. PMRes 2020 1Thibault HugNo ratings yet
- A Numerical Method For The Design and Analysis of Counter Rotating PropellorsDocument8 pagesA Numerical Method For The Design and Analysis of Counter Rotating PropellorsmarkNo ratings yet
- Nantes, 4 Cohort 2014: Experimental Ship Hydrodynamics ExamDocument2 pagesNantes, 4 Cohort 2014: Experimental Ship Hydrodynamics Exammicsanche60No ratings yet
- Experimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface ConditionsDocument12 pagesExperimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface Conditionsnoor muhammadNo ratings yet
- White Paper o P 2014 Efficient PropellerDocument12 pagesWhite Paper o P 2014 Efficient PropellerdavalgonzalezNo ratings yet
- Design and Performance of Bow Thrusters-Beveridge-1971Document48 pagesDesign and Performance of Bow Thrusters-Beveridge-1971Ron Chan100% (2)
- Shouichiro IioDocument5 pagesShouichiro IiorendiNo ratings yet
- Maximizing The Efficiency of A Flexible Propulsor Using Experimental OptimizationDocument19 pagesMaximizing The Efficiency of A Flexible Propulsor Using Experimental OptimizationhaizhouNo ratings yet
- Developments in The Design of Ship PropeDocument8 pagesDevelopments in The Design of Ship Prope장영훈No ratings yet
- Cavitation Characteristics and Infinite Aspect Ration Characteristics of A Hydrofoil SectionDocument31 pagesCavitation Characteristics and Infinite Aspect Ration Characteristics of A Hydrofoil SectionMuadz MuhammadNo ratings yet
- Aerospace Science and Technology: David Serrano, Max Ren, Ahmed Jawad Qureshi, Sina GhaemiDocument14 pagesAerospace Science and Technology: David Serrano, Max Ren, Ahmed Jawad Qureshi, Sina GhaemiImportant Not importantNo ratings yet
- Experimental and Numerical Investigation On Drag Reduction of Non-Smooth Bionic Jet Surface - 1-S2.0-S0029801814000535-MainDocument8 pagesExperimental and Numerical Investigation On Drag Reduction of Non-Smooth Bionic Jet Surface - 1-S2.0-S0029801814000535-MainShanthan GuduruNo ratings yet
- Transonic Investigation of Two-Dimensional Nozzles Designed For Supersonic CruiseDocument24 pagesTransonic Investigation of Two-Dimensional Nozzles Designed For Supersonic CruiseMitraNo ratings yet
- Large-Scale Laboratory Experiment On Erosion of Sand Beds by Moving Circular Vertical JetsDocument8 pagesLarge-Scale Laboratory Experiment On Erosion of Sand Beds by Moving Circular Vertical Jetswsc9921leNo ratings yet
- .0 .0 GAP - AXIAL.1-s2.0-S1000936117302200-mainDocument13 pages.0 .0 GAP - AXIAL.1-s2.0-S1000936117302200-mainRabei RomulusNo ratings yet
- Experimental Free Boundary LayerDocument33 pagesExperimental Free Boundary LayerRafael CuaicalNo ratings yet
- National Advisory Commi'I.I'Ee For Aeronautics: Afm:CDocument24 pagesNational Advisory Commi'I.I'Ee For Aeronautics: Afm:CdrumingeekNo ratings yet
- Yilmaz Etal smp17 An Investigation Into Computational Modelling of CavitationDocument8 pagesYilmaz Etal smp17 An Investigation Into Computational Modelling of Cavitationbenedetto di paoloNo ratings yet
- Calculation of Coefficients of Contraction, Velocity, and Discharge of A Circular Orifice Using A Hydraulic BenchDocument4 pagesCalculation of Coefficients of Contraction, Velocity, and Discharge of A Circular Orifice Using A Hydraulic BenchFran CarnaceNo ratings yet
- Numerical Investigation of A Stepped Planing Hull in Calm WaterDocument8 pagesNumerical Investigation of A Stepped Planing Hull in Calm WaterMarsel GabrielNo ratings yet
- A P,.Chief: DelliDocument19 pagesA P,.Chief: DelliThibault HugNo ratings yet
- Variations in Clear Water Scour Geometry at Piers of Di Erent e Ective WidthsDocument15 pagesVariations in Clear Water Scour Geometry at Piers of Di Erent e Ective Widthsfernando salimNo ratings yet
- Fans Design and Operation of Centrifugal, Axial-Flow, and Cross-Flow FansDocument11 pagesFans Design and Operation of Centrifugal, Axial-Flow, and Cross-Flow FansHüseyin Atakan BaytaşNo ratings yet
- Flow Simulation Over CylinderDocument22 pagesFlow Simulation Over CylinderJayesh MahajanNo ratings yet
- On The Development of A New-Series Propeller For High-Speed CraftsDocument9 pagesOn The Development of A New-Series Propeller For High-Speed CraftsChien Manh NguyenNo ratings yet
- Aic 10857 PDFDocument10 pagesAic 10857 PDFSoufiane El AoumarieNo ratings yet
- Analysis+of+Non Symmetrical+Flapping+AirfoilsDocument18 pagesAnalysis+of+Non Symmetrical+Flapping+AirfoilsAsif HameedNo ratings yet
- Spillway Pre2Document34 pagesSpillway Pre2Vikram SinghNo ratings yet
- Development of A Four Bladed SurfaceDocument34 pagesDevelopment of A Four Bladed SurfaceTihomir MarkovicNo ratings yet
- Savitsky 1Document56 pagesSavitsky 1Mark Evan SalutinNo ratings yet
- Numerical Simulation of A Marine Propeller in A Cross Flow: Seth D. Schroeder, Charles M. DaiDocument17 pagesNumerical Simulation of A Marine Propeller in A Cross Flow: Seth D. Schroeder, Charles M. DaiAnonymous gxAd4liNo ratings yet
- Quasi-Efficiency PropulsionDocument31 pagesQuasi-Efficiency PropulsionWafaà WafaNo ratings yet
- Real-Time Velocity Prediction Program For Wind Tunnel Testing of Sailing YachtsDocument9 pagesReal-Time Velocity Prediction Program For Wind Tunnel Testing of Sailing Yachtssososo4619No ratings yet
- Propeller Rudder InteractionDocument66 pagesPropeller Rudder InteractionLavesh KhandelwalNo ratings yet
- Experimental Thermal and Fluid ScienceDocument9 pagesExperimental Thermal and Fluid SciencesathycimNo ratings yet
- SPE-16083 Transprte de Cutting en DireccionalDocument11 pagesSPE-16083 Transprte de Cutting en DireccionalCamila PalaciosNo ratings yet
- IJETR022947Document5 pagesIJETR022947erpublicationNo ratings yet
- B3-1.FAST2011.Davis Et Al PDFDocument8 pagesB3-1.FAST2011.Davis Et Al PDFtoshugoNo ratings yet
- Bilel Et Al.Document10 pagesBilel Et Al.بلال بن عميرهNo ratings yet
- Vortex Transport and Blade Interactions in High Pressure TurbinesDocument11 pagesVortex Transport and Blade Interactions in High Pressure Turbinesapi-19772009100% (1)
- TA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANDocument11 pagesTA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANhemsladyvsky9164No ratings yet
- Wind Tunnel Techniques: Dr. Venugopal MMDocument15 pagesWind Tunnel Techniques: Dr. Venugopal MMVenugopal M MNo ratings yet
- The Internal Flow Investigation of A Centrifugal PumpDocument8 pagesThe Internal Flow Investigation of A Centrifugal Pumppreetham108No ratings yet
- Effect of Flow Parameters On An Obliquely Impinging Jet in A Cross Flow R.E. Jones, R.M. Kelso and B.B. DallyDocument4 pagesEffect of Flow Parameters On An Obliquely Impinging Jet in A Cross Flow R.E. Jones, R.M. Kelso and B.B. DallyYuneskyNo ratings yet
- Rsu Drilling Mooring Riser ProposalDocument9 pagesRsu Drilling Mooring Riser ProposalCROSSFIELD ENGINEERING ENERGYNo ratings yet
- Idei Principale Articole Si TezeDocument4 pagesIdei Principale Articole Si TezeRazvan RomanNo ratings yet
- Measurements of Hydrodynamic Forces - Surface Pressure - and Wake For Obliquely Towed Tanker Model and Uncertainty Analysis For CFD ValidationDocument11 pagesMeasurements of Hydrodynamic Forces - Surface Pressure - and Wake For Obliquely Towed Tanker Model and Uncertainty Analysis For CFD ValidationelmasykurNo ratings yet
- AIAA-1999-3402 Riblets On Airfoils and Wings-A ReviewDocument20 pagesAIAA-1999-3402 Riblets On Airfoils and Wings-A Reviewsseale_79157309No ratings yet
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964From EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNo ratings yet
- Turbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsFrom EverandTurbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsNo ratings yet
- Nittel M F.numerically Controll - jul.1989.MTDocument8 pagesNittel M F.numerically Controll - jul.1989.MTldigasNo ratings yet
- UntitledDocument176 pagesUntitledldigasNo ratings yet
- Developed Blade Area Drawings For Raked PDFDocument7 pagesDeveloped Blade Area Drawings For Raked PDFldigasNo ratings yet
- WAGENINGEN Propeller C - and D-Series JIPDocument1 pageWAGENINGEN Propeller C - and D-Series JIPldigasNo ratings yet
- End Plate PropellersDocument3 pagesEnd Plate PropellersldigasNo ratings yet
- Design of Propeller Tunnels PDFDocument14 pagesDesign of Propeller Tunnels PDFldigasNo ratings yet
- Surface Piercing PropellersDocument32 pagesSurface Piercing PropellersldigasNo ratings yet
- 6 PDFDocument62 pages6 PDFldigas100% (1)
- 3559Document24 pages3559ldigasNo ratings yet
- Marine Insurance Claims in ShippingDocument10 pagesMarine Insurance Claims in ShippingldigasNo ratings yet
- DangJ-final Version PDFDocument19 pagesDangJ-final Version PDFldigasNo ratings yet
- 4851 Technical SpecificationsDocument1 page4851 Technical SpecificationsldigasNo ratings yet
- Chapter IV PLANING CRAFT - Daniel SavitskyDocument29 pagesChapter IV PLANING CRAFT - Daniel Savitskyldigas100% (1)
- Typhoon - Insulated SOLAS Abandonment SuitDocument1 pageTyphoon - Insulated SOLAS Abandonment SuitldigasNo ratings yet
- Belzona 1341 (Supermetalglide) - Instructions For UseDocument2 pagesBelzona 1341 (Supermetalglide) - Instructions For Usevangeliskyriakos8998No ratings yet
- SPC & MSA PresentationDocument84 pagesSPC & MSA PresentationRaajha Munibathiran100% (3)
- NMR-1 BasicDocument52 pagesNMR-1 Basicamit086No ratings yet
- Basics of Computer Science Tutorial PDFDocument28 pagesBasics of Computer Science Tutorial PDFceesamNo ratings yet
- Lecture 16Document36 pagesLecture 16Elsayed ElazazyNo ratings yet
- DE+MPLAB AssignmentDocument8 pagesDE+MPLAB AssignmentBeena ShettyNo ratings yet
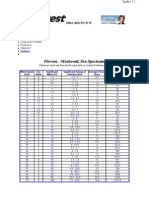
- Pierson MoskovitzDocument2 pagesPierson Moskovitzmavi1979No ratings yet
- Consumer Search: An Extended Framework: Peter H. Bloch Daniel L. Sherrell Nancy M. RidgwayDocument9 pagesConsumer Search: An Extended Framework: Peter H. Bloch Daniel L. Sherrell Nancy M. RidgwayMinebNo ratings yet
- A Woodstove Compendium 1981Document377 pagesA Woodstove Compendium 1981shukisheinmanNo ratings yet
- Anna University Mechanical Engineering - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsDocument224 pagesAnna University Mechanical Engineering - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsM.V. TVNo ratings yet
- Java and SQL Sample Code Example PDFDocument8 pagesJava and SQL Sample Code Example PDFJose A Aparicio FernandezNo ratings yet
- Statistics-Exercise 3Document4 pagesStatistics-Exercise 3Phanna MongNo ratings yet
- DocumentDocument533 pagesDocumentNancyNo ratings yet
- Game Catalog-Casillas LeilaniDocument7 pagesGame Catalog-Casillas LeilaniLeilani CasillasNo ratings yet
- How To Create A Text Portrait Effect in Photoshop PDFDocument13 pagesHow To Create A Text Portrait Effect in Photoshop PDFkimberlyNo ratings yet
- Project in Industrial ElectronicsDocument50 pagesProject in Industrial ElectronicsShiela100% (1)
- BlowerDocument7 pagesBlowerghanshyam29998987100% (2)
- Transformer Oil AnalysisDocument1 pageTransformer Oil Analysisalvin meNo ratings yet
- Speedcrunch ManualDocument27 pagesSpeedcrunch ManualAghil VinayakNo ratings yet
- Vol 3. ExamplesDocument60 pagesVol 3. ExamplesRJNo ratings yet
- Face-Recoginition Using MLDocument25 pagesFace-Recoginition Using MLANMOL KUMARNo ratings yet
- Sicor Geared 10 Feb20Document8 pagesSicor Geared 10 Feb20Pritesh NaikNo ratings yet
- Topic 6 Optimal Dispatch of GenerationDocument136 pagesTopic 6 Optimal Dispatch of GenerationEng. Ali Al SaedNo ratings yet
- Final 2020 SolutionDocument12 pagesFinal 2020 SolutionShokhrud SafarovNo ratings yet
- Dbms TutorialDocument13 pagesDbms TutorialJonnalyn CañadaNo ratings yet
- Maximabook 19 Sept 2004Document155 pagesMaximabook 19 Sept 2004sudoNo ratings yet
- HUSO2019 AAaa 1141780-38Document152 pagesHUSO2019 AAaa 1141780-38Luis RolaNo ratings yet
- PHYS 3616E Chap91Document15 pagesPHYS 3616E Chap91johnNo ratings yet






































































































Download as pdf or txt
You might also like
- ABD Exam Prep PDFDocument45 pagesABD Exam Prep PDFBruno TelesNo ratings yet
- Testing and Commissioning of A Low-Speed (Incompressible), Subsonic, Transonic, andDocument7 pagesTesting and Commissioning of A Low-Speed (Incompressible), Subsonic, Transonic, andMj Santos100% (1)
- GrgtrhytjyjyDocument2 pagesGrgtrhytjyjyKushanNo ratings yet
- General Disclaimer One or More of The Following Statements May Affect This DocumentDocument14 pagesGeneral Disclaimer One or More of The Following Statements May Affect This DocumentUmair MunirNo ratings yet
- Experimental Investigation of Propeller Wake Velocity Field To Determine The Major Factors Affecting Propeller Wake WashDocument15 pagesExperimental Investigation of Propeller Wake Velocity Field To Determine The Major Factors Affecting Propeller Wake WashetqrgasdfgNo ratings yet
- Felli - Experimental Ana.2006.SYMPDocument8 pagesFelli - Experimental Ana.2006.SYMPIgnacio SantanaNo ratings yet
- Propeller in Vortex RingDocument16 pagesPropeller in Vortex Ringmondy.egNo ratings yet
- 15th Numerical Towing Tank Symposium PDFDocument223 pages15th Numerical Towing Tank Symposium PDFAnonymous mv84nhzNo ratings yet
- CFD WaterjetDocument8 pagesCFD WaterjettafocanNo ratings yet
- Asymmetric Behavior of Propeller-Rudder SystemDocument13 pagesAsymmetric Behavior of Propeller-Rudder Systemsumardiono10No ratings yet
- Hydrodynamic Performance of A Surfboard FinDocument4 pagesHydrodynamic Performance of A Surfboard FinWesley FernandesNo ratings yet
- Renewable Energy: Keum Soo Jeon, Jun Ik Jeong, Jae-Kyung Pan, Ki-Wahn RyuDocument10 pagesRenewable Energy: Keum Soo Jeon, Jun Ik Jeong, Jae-Kyung Pan, Ki-Wahn Ryuhasybi abiNo ratings yet
- Hossein+Nouroozi+i+1+in. PMRes 2020 1Document12 pagesHossein+Nouroozi+i+1+in. PMRes 2020 1Thibault HugNo ratings yet
- A Numerical Method For The Design and Analysis of Counter Rotating PropellorsDocument8 pagesA Numerical Method For The Design and Analysis of Counter Rotating PropellorsmarkNo ratings yet
- Nantes, 4 Cohort 2014: Experimental Ship Hydrodynamics ExamDocument2 pagesNantes, 4 Cohort 2014: Experimental Ship Hydrodynamics Exammicsanche60No ratings yet
- Experimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface ConditionsDocument12 pagesExperimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface Conditionsnoor muhammadNo ratings yet
- White Paper o P 2014 Efficient PropellerDocument12 pagesWhite Paper o P 2014 Efficient PropellerdavalgonzalezNo ratings yet
- Design and Performance of Bow Thrusters-Beveridge-1971Document48 pagesDesign and Performance of Bow Thrusters-Beveridge-1971Ron Chan100% (2)
- Shouichiro IioDocument5 pagesShouichiro IiorendiNo ratings yet
- Maximizing The Efficiency of A Flexible Propulsor Using Experimental OptimizationDocument19 pagesMaximizing The Efficiency of A Flexible Propulsor Using Experimental OptimizationhaizhouNo ratings yet
- Developments in The Design of Ship PropeDocument8 pagesDevelopments in The Design of Ship Prope장영훈No ratings yet
- Cavitation Characteristics and Infinite Aspect Ration Characteristics of A Hydrofoil SectionDocument31 pagesCavitation Characteristics and Infinite Aspect Ration Characteristics of A Hydrofoil SectionMuadz MuhammadNo ratings yet
- Aerospace Science and Technology: David Serrano, Max Ren, Ahmed Jawad Qureshi, Sina GhaemiDocument14 pagesAerospace Science and Technology: David Serrano, Max Ren, Ahmed Jawad Qureshi, Sina GhaemiImportant Not importantNo ratings yet
- Experimental and Numerical Investigation On Drag Reduction of Non-Smooth Bionic Jet Surface - 1-S2.0-S0029801814000535-MainDocument8 pagesExperimental and Numerical Investigation On Drag Reduction of Non-Smooth Bionic Jet Surface - 1-S2.0-S0029801814000535-MainShanthan GuduruNo ratings yet
- Transonic Investigation of Two-Dimensional Nozzles Designed For Supersonic CruiseDocument24 pagesTransonic Investigation of Two-Dimensional Nozzles Designed For Supersonic CruiseMitraNo ratings yet
- Large-Scale Laboratory Experiment On Erosion of Sand Beds by Moving Circular Vertical JetsDocument8 pagesLarge-Scale Laboratory Experiment On Erosion of Sand Beds by Moving Circular Vertical Jetswsc9921leNo ratings yet
- .0 .0 GAP - AXIAL.1-s2.0-S1000936117302200-mainDocument13 pages.0 .0 GAP - AXIAL.1-s2.0-S1000936117302200-mainRabei RomulusNo ratings yet
- Experimental Free Boundary LayerDocument33 pagesExperimental Free Boundary LayerRafael CuaicalNo ratings yet
- National Advisory Commi'I.I'Ee For Aeronautics: Afm:CDocument24 pagesNational Advisory Commi'I.I'Ee For Aeronautics: Afm:CdrumingeekNo ratings yet
- Yilmaz Etal smp17 An Investigation Into Computational Modelling of CavitationDocument8 pagesYilmaz Etal smp17 An Investigation Into Computational Modelling of Cavitationbenedetto di paoloNo ratings yet
- Calculation of Coefficients of Contraction, Velocity, and Discharge of A Circular Orifice Using A Hydraulic BenchDocument4 pagesCalculation of Coefficients of Contraction, Velocity, and Discharge of A Circular Orifice Using A Hydraulic BenchFran CarnaceNo ratings yet
- Numerical Investigation of A Stepped Planing Hull in Calm WaterDocument8 pagesNumerical Investigation of A Stepped Planing Hull in Calm WaterMarsel GabrielNo ratings yet
- A P,.Chief: DelliDocument19 pagesA P,.Chief: DelliThibault HugNo ratings yet
- Variations in Clear Water Scour Geometry at Piers of Di Erent e Ective WidthsDocument15 pagesVariations in Clear Water Scour Geometry at Piers of Di Erent e Ective Widthsfernando salimNo ratings yet
- Fans Design and Operation of Centrifugal, Axial-Flow, and Cross-Flow FansDocument11 pagesFans Design and Operation of Centrifugal, Axial-Flow, and Cross-Flow FansHüseyin Atakan BaytaşNo ratings yet
- Flow Simulation Over CylinderDocument22 pagesFlow Simulation Over CylinderJayesh MahajanNo ratings yet
- On The Development of A New-Series Propeller For High-Speed CraftsDocument9 pagesOn The Development of A New-Series Propeller For High-Speed CraftsChien Manh NguyenNo ratings yet
- Aic 10857 PDFDocument10 pagesAic 10857 PDFSoufiane El AoumarieNo ratings yet
- Analysis+of+Non Symmetrical+Flapping+AirfoilsDocument18 pagesAnalysis+of+Non Symmetrical+Flapping+AirfoilsAsif HameedNo ratings yet
- Spillway Pre2Document34 pagesSpillway Pre2Vikram SinghNo ratings yet
- Development of A Four Bladed SurfaceDocument34 pagesDevelopment of A Four Bladed SurfaceTihomir MarkovicNo ratings yet
- Savitsky 1Document56 pagesSavitsky 1Mark Evan SalutinNo ratings yet
- Numerical Simulation of A Marine Propeller in A Cross Flow: Seth D. Schroeder, Charles M. DaiDocument17 pagesNumerical Simulation of A Marine Propeller in A Cross Flow: Seth D. Schroeder, Charles M. DaiAnonymous gxAd4liNo ratings yet
- Quasi-Efficiency PropulsionDocument31 pagesQuasi-Efficiency PropulsionWafaà WafaNo ratings yet
- Real-Time Velocity Prediction Program For Wind Tunnel Testing of Sailing YachtsDocument9 pagesReal-Time Velocity Prediction Program For Wind Tunnel Testing of Sailing Yachtssososo4619No ratings yet
- Propeller Rudder InteractionDocument66 pagesPropeller Rudder InteractionLavesh KhandelwalNo ratings yet
- Experimental Thermal and Fluid ScienceDocument9 pagesExperimental Thermal and Fluid SciencesathycimNo ratings yet
- SPE-16083 Transprte de Cutting en DireccionalDocument11 pagesSPE-16083 Transprte de Cutting en DireccionalCamila PalaciosNo ratings yet
- IJETR022947Document5 pagesIJETR022947erpublicationNo ratings yet
- B3-1.FAST2011.Davis Et Al PDFDocument8 pagesB3-1.FAST2011.Davis Et Al PDFtoshugoNo ratings yet
- Bilel Et Al.Document10 pagesBilel Et Al.بلال بن عميرهNo ratings yet
- Vortex Transport and Blade Interactions in High Pressure TurbinesDocument11 pagesVortex Transport and Blade Interactions in High Pressure Turbinesapi-19772009100% (1)
- TA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANDocument11 pagesTA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANhemsladyvsky9164No ratings yet
- Wind Tunnel Techniques: Dr. Venugopal MMDocument15 pagesWind Tunnel Techniques: Dr. Venugopal MMVenugopal M MNo ratings yet
- The Internal Flow Investigation of A Centrifugal PumpDocument8 pagesThe Internal Flow Investigation of A Centrifugal Pumppreetham108No ratings yet
- Effect of Flow Parameters On An Obliquely Impinging Jet in A Cross Flow R.E. Jones, R.M. Kelso and B.B. DallyDocument4 pagesEffect of Flow Parameters On An Obliquely Impinging Jet in A Cross Flow R.E. Jones, R.M. Kelso and B.B. DallyYuneskyNo ratings yet
- Rsu Drilling Mooring Riser ProposalDocument9 pagesRsu Drilling Mooring Riser ProposalCROSSFIELD ENGINEERING ENERGYNo ratings yet
- Idei Principale Articole Si TezeDocument4 pagesIdei Principale Articole Si TezeRazvan RomanNo ratings yet
- Measurements of Hydrodynamic Forces - Surface Pressure - and Wake For Obliquely Towed Tanker Model and Uncertainty Analysis For CFD ValidationDocument11 pagesMeasurements of Hydrodynamic Forces - Surface Pressure - and Wake For Obliquely Towed Tanker Model and Uncertainty Analysis For CFD ValidationelmasykurNo ratings yet
- AIAA-1999-3402 Riblets On Airfoils and Wings-A ReviewDocument20 pagesAIAA-1999-3402 Riblets On Airfoils and Wings-A Reviewsseale_79157309No ratings yet
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964From EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNo ratings yet
- Turbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsFrom EverandTurbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsNo ratings yet
- Nittel M F.numerically Controll - jul.1989.MTDocument8 pagesNittel M F.numerically Controll - jul.1989.MTldigasNo ratings yet
- UntitledDocument176 pagesUntitledldigasNo ratings yet
- Developed Blade Area Drawings For Raked PDFDocument7 pagesDeveloped Blade Area Drawings For Raked PDFldigasNo ratings yet
- WAGENINGEN Propeller C - and D-Series JIPDocument1 pageWAGENINGEN Propeller C - and D-Series JIPldigasNo ratings yet
- End Plate PropellersDocument3 pagesEnd Plate PropellersldigasNo ratings yet
- Design of Propeller Tunnels PDFDocument14 pagesDesign of Propeller Tunnels PDFldigasNo ratings yet
- Surface Piercing PropellersDocument32 pagesSurface Piercing PropellersldigasNo ratings yet
- 6 PDFDocument62 pages6 PDFldigas100% (1)
- 3559Document24 pages3559ldigasNo ratings yet
- Marine Insurance Claims in ShippingDocument10 pagesMarine Insurance Claims in ShippingldigasNo ratings yet
- DangJ-final Version PDFDocument19 pagesDangJ-final Version PDFldigasNo ratings yet
- 4851 Technical SpecificationsDocument1 page4851 Technical SpecificationsldigasNo ratings yet
- Chapter IV PLANING CRAFT - Daniel SavitskyDocument29 pagesChapter IV PLANING CRAFT - Daniel Savitskyldigas100% (1)
- Typhoon - Insulated SOLAS Abandonment SuitDocument1 pageTyphoon - Insulated SOLAS Abandonment SuitldigasNo ratings yet
- Belzona 1341 (Supermetalglide) - Instructions For UseDocument2 pagesBelzona 1341 (Supermetalglide) - Instructions For Usevangeliskyriakos8998No ratings yet
- SPC & MSA PresentationDocument84 pagesSPC & MSA PresentationRaajha Munibathiran100% (3)
- NMR-1 BasicDocument52 pagesNMR-1 Basicamit086No ratings yet
- Basics of Computer Science Tutorial PDFDocument28 pagesBasics of Computer Science Tutorial PDFceesamNo ratings yet
- Lecture 16Document36 pagesLecture 16Elsayed ElazazyNo ratings yet
- DE+MPLAB AssignmentDocument8 pagesDE+MPLAB AssignmentBeena ShettyNo ratings yet
- Pierson MoskovitzDocument2 pagesPierson Moskovitzmavi1979No ratings yet
- Consumer Search: An Extended Framework: Peter H. Bloch Daniel L. Sherrell Nancy M. RidgwayDocument9 pagesConsumer Search: An Extended Framework: Peter H. Bloch Daniel L. Sherrell Nancy M. RidgwayMinebNo ratings yet
- A Woodstove Compendium 1981Document377 pagesA Woodstove Compendium 1981shukisheinmanNo ratings yet
- Anna University Mechanical Engineering - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsDocument224 pagesAnna University Mechanical Engineering - All Year, Semester Syllabus Ordered Lecture Notes and Study Material For College StudentsM.V. TVNo ratings yet
- Java and SQL Sample Code Example PDFDocument8 pagesJava and SQL Sample Code Example PDFJose A Aparicio FernandezNo ratings yet
- Statistics-Exercise 3Document4 pagesStatistics-Exercise 3Phanna MongNo ratings yet
- DocumentDocument533 pagesDocumentNancyNo ratings yet
- Game Catalog-Casillas LeilaniDocument7 pagesGame Catalog-Casillas LeilaniLeilani CasillasNo ratings yet
- How To Create A Text Portrait Effect in Photoshop PDFDocument13 pagesHow To Create A Text Portrait Effect in Photoshop PDFkimberlyNo ratings yet
- Project in Industrial ElectronicsDocument50 pagesProject in Industrial ElectronicsShiela100% (1)
- BlowerDocument7 pagesBlowerghanshyam29998987100% (2)
- Transformer Oil AnalysisDocument1 pageTransformer Oil Analysisalvin meNo ratings yet
- Speedcrunch ManualDocument27 pagesSpeedcrunch ManualAghil VinayakNo ratings yet
- Vol 3. ExamplesDocument60 pagesVol 3. ExamplesRJNo ratings yet
- Face-Recoginition Using MLDocument25 pagesFace-Recoginition Using MLANMOL KUMARNo ratings yet
- Sicor Geared 10 Feb20Document8 pagesSicor Geared 10 Feb20Pritesh NaikNo ratings yet
- Topic 6 Optimal Dispatch of GenerationDocument136 pagesTopic 6 Optimal Dispatch of GenerationEng. Ali Al SaedNo ratings yet
- Final 2020 SolutionDocument12 pagesFinal 2020 SolutionShokhrud SafarovNo ratings yet
- Dbms TutorialDocument13 pagesDbms TutorialJonnalyn CañadaNo ratings yet
- Maximabook 19 Sept 2004Document155 pagesMaximabook 19 Sept 2004sudoNo ratings yet
- HUSO2019 AAaa 1141780-38Document152 pagesHUSO2019 AAaa 1141780-38Luis RolaNo ratings yet
- PHYS 3616E Chap91Document15 pagesPHYS 3616E Chap91johnNo ratings yet