Download as pdf or txt
You might also like
- THM 200 4RDocument96 pagesTHM 200 4Rerick alexander hernandez100% (1)
- Fault Current CalculatorDocument6 pagesFault Current CalculatorVũDuyTânNo ratings yet
- V. Analysis Ω A. QuestionsDocument2 pagesV. Analysis Ω A. QuestionsjhasminNo ratings yet
- Smart Parking System Using Iot: Elakyar, Juhi Seth, Pola Ashritha, R NamithDocument5 pagesSmart Parking System Using Iot: Elakyar, Juhi Seth, Pola Ashritha, R NamithAkNo ratings yet
- Process Description DmeDocument3 pagesProcess Description DmeFirdaus YahyaNo ratings yet
- Serial Dilution MethodDocument3 pagesSerial Dilution Methoddraneesh80% (5)
- LAPL0083Document7 pagesLAPL0083MOLI_RABI_DIYANo ratings yet
- AC MachinesDocument8 pagesAC Machinesprince ian cruzNo ratings yet
- Application of Nems and MemsDocument63 pagesApplication of Nems and MemsAk InventerNo ratings yet
- Cable Sizing WorksheetDocument12 pagesCable Sizing WorksheetMarvellous100% (2)
- Physics Laboratory Manual Applied Science Short Procedure (Physics)Document19 pagesPhysics Laboratory Manual Applied Science Short Procedure (Physics)Sukhee SakthivelNo ratings yet
- Angle Design AISC - CantileverDocument5 pagesAngle Design AISC - CantileverRajveer SinghNo ratings yet
- Bab 10-11 Gaya Internal - Diagram Momen Rev1Document20 pagesBab 10-11 Gaya Internal - Diagram Momen Rev1Ilham ZulitaNo ratings yet
- Bab 10-11 Gaya Internal - Diagram Momen Rev1Document20 pagesBab 10-11 Gaya Internal - Diagram Momen Rev1Ilham ZulitaNo ratings yet
- Voltage Drop and Cable Sizing CalculationDocument4 pagesVoltage Drop and Cable Sizing Calculationptbbs engineeringNo ratings yet
- EE247 Lecture 20Document30 pagesEE247 Lecture 20maqadarNo ratings yet
- Ders 03 Ac Circuits and 3phase PDFDocument11 pagesDers 03 Ac Circuits and 3phase PDFBUĞRA UYĞURNo ratings yet
- Influence LinesDocument100 pagesInfluence LinesAshish OjhaNo ratings yet
- Checking of Steel Members in FlexureDocument24 pagesChecking of Steel Members in FlexureLemuel GultianoNo ratings yet
- Ta3 Is456 enDocument11 pagesTa3 Is456 enkyle IRSYADNo ratings yet
- EE143 - Fall 2016 Microfabrication Technologies Lecture 14: MEMS ProcessDocument8 pagesEE143 - Fall 2016 Microfabrication Technologies Lecture 14: MEMS Processkareem hamedNo ratings yet
- Technical Physics II Lecture Notes L2Document4 pagesTechnical Physics II Lecture Notes L2Wanjiru randolphNo ratings yet
- 1 DataDocument12 pages1 Datayumna khanNo ratings yet
- B23CS1044 (Neeraj Kumar) Lab 10Document7 pagesB23CS1044 (Neeraj Kumar) Lab 10b23cs1044No ratings yet
- Zadatak 6Document11 pagesZadatak 6Marko AntićNo ratings yet
- 1 Fundamentals PV Energy ConversionDocument22 pages1 Fundamentals PV Energy Conversionbảo trầnNo ratings yet
- Topic 6. AC Theory: ASE1202 Electrical DevicesDocument64 pagesTopic 6. AC Theory: ASE1202 Electrical DevicesSmurf TanNo ratings yet
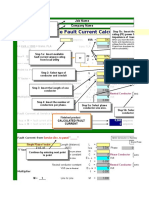
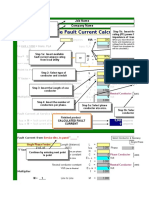
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument6 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLAkrator666No ratings yet
- CBSE Class-12 Physics Quick Revision Notes Chapter-07: Alternating CurrentDocument4 pagesCBSE Class-12 Physics Quick Revision Notes Chapter-07: Alternating CurrentprithiksNo ratings yet
- ESTTTDocument13 pagesESTTTChristian Paul PanlaqueNo ratings yet
- Final Formula Sheet PDFDocument42 pagesFinal Formula Sheet PDFjocker's informationsNo ratings yet
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument6 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLAMeghavahinaNo ratings yet
- Centroid Work Done in Stretching A Spring: y - Axis X y RDocument3 pagesCentroid Work Done in Stretching A Spring: y - Axis X y RMarche Sebastian100% (1)
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument7 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLARobert R. TiinNo ratings yet
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument7 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLARobert R. TiinNo ratings yet
- 006 Lec. 6 Stress Analysis (ME 276)Document42 pages006 Lec. 6 Stress Analysis (ME 276)IslamNo ratings yet
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument6 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLARaf IrtNo ratings yet
- Fault Current Calculator 2014Document6 pagesFault Current Calculator 2014Wong Chiun LiangNo ratings yet
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument6 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLAHari OM Mishra0% (1)
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument7 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLAAbhishek JoshiNo ratings yet
- Fault Current Calculation V7 1Document6 pagesFault Current Calculation V7 1Abdul Majeed SurmawalaNo ratings yet
- Ass 3Document3 pagesAss 3DevashishSinghNo ratings yet
- Beams Shear & Moment DiagramsDocument24 pagesBeams Shear & Moment DiagramsSiaquil Vucane SitoeNo ratings yet
- Hill YardDocument41 pagesHill YardSatish NairNo ratings yet
- 發電機Document18 pages發電機LEON, CHING-YAO TANGNo ratings yet
- Fault Current CalculationDocument8 pagesFault Current CalculationCarlos TedescoNo ratings yet
- Summary of Last Lecture: Classical Mechanics & Properties of GasesDocument7 pagesSummary of Last Lecture: Classical Mechanics & Properties of Gasesroxy8marie8chanNo ratings yet
- Smart Materials: D.S.S.Sudhakar FR - Conceicao Rodrigues College of Engineering BANDRA (W), MUMBAI-40050Document65 pagesSmart Materials: D.S.S.Sudhakar FR - Conceicao Rodrigues College of Engineering BANDRA (W), MUMBAI-40050DIPAK VINAYAK SHIRBHATENo ratings yet
- Mosfet Review and Short Channel Effects in Fets: OutlineDocument39 pagesMosfet Review and Short Channel Effects in Fets: OutlineamitcrathodNo ratings yet
- Ac KeyDocument10 pagesAc Keypinnaacleclasses salemNo ratings yet
- Available Fault Current Calculation: 0 I kVA X 1000 Trans. FLADocument11 pagesAvailable Fault Current Calculation: 0 I kVA X 1000 Trans. FLARick SmithNo ratings yet
- AP Physics1 Student Workbook AppendixDocument11 pagesAP Physics1 Student Workbook AppendixcarlosNo ratings yet
- Fault Current Calculation V7 1Document8 pagesFault Current Calculation V7 1enghassanain6486No ratings yet
- Fault Current Calculation V7 1Document6 pagesFault Current Calculation V7 1Pedro ComodoroNo ratings yet
- EE 221 Circuits Laboratory II Laboratory Report: Reactance, Magnitude and PhaseDocument6 pagesEE 221 Circuits Laboratory II Laboratory Report: Reactance, Magnitude and PhaseEric Doctore KrageNo ratings yet
- IECEP Problem SolvingsDocument30 pagesIECEP Problem SolvingsAJay LevantinoNo ratings yet
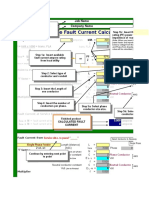
- Available Fault Current Calculation: E X 1.732 I kVA X 1000 Trans. FLADocument5 pagesAvailable Fault Current Calculation: E X 1.732 I kVA X 1000 Trans. FLAankit jainNo ratings yet
- Available Fault Current Calculation: E X 1.732 I kVA X 1000 Trans. FLADocument5 pagesAvailable Fault Current Calculation: E X 1.732 I kVA X 1000 Trans. FLAankit jainNo ratings yet
- Available Fault Current Calculation: E X 1.732 I kVA X 1000 Trans. FLADocument5 pagesAvailable Fault Current Calculation: E X 1.732 I kVA X 1000 Trans. FLAankit jainNo ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- 2G Kpi IntroductionDocument3 pages2G Kpi IntroductionImtiaz Ahmed100% (1)
- Imtiaz Ahmed Master TranscriptDocument3 pagesImtiaz Ahmed Master TranscriptImtiaz AhmedNo ratings yet
- DBM To WattDocument2 pagesDBM To WattImtiaz AhmedNo ratings yet
- Sahibzada Ali MahmudDocument9 pagesSahibzada Ali MahmudImtiaz AhmedNo ratings yet
- Dr. Wazir Mohammad Assistant Professor KTHDocument40 pagesDr. Wazir Mohammad Assistant Professor KTHImtiaz AhmedNo ratings yet
- Hypotonic Hypertonic Isotonic Solutions UsesDocument9 pagesHypotonic Hypertonic Isotonic Solutions UsesImtiaz AhmedNo ratings yet
- Solar Design EngineerDocument2 pagesSolar Design EngineerImtiaz AhmedNo ratings yet
- The Diabetic Foot: (Physician'S Overview)Document43 pagesThe Diabetic Foot: (Physician'S Overview)Imtiaz AhmedNo ratings yet
- Khoni Haram by Aatir ShaheenDocument19 pagesKhoni Haram by Aatir ShaheenImtiaz AhmedNo ratings yet
- Re Joining LetterDocument2 pagesRe Joining LetterImtiaz Ahmed100% (1)
- Iss Matti Ka Qarz by Asia Mazhar PDFDocument16 pagesIss Matti Ka Qarz by Asia Mazhar PDFImtiaz AhmedNo ratings yet
- Tum Meri Ho by Asia Razaqi PDFDocument41 pagesTum Meri Ho by Asia Razaqi PDFImtiaz Ahmed100% (1)
- Case Study 2Document10 pagesCase Study 2Mary Joy AquinoNo ratings yet
- Shutdown Solenoids CatalogueDocument10 pagesShutdown Solenoids CataloguepevareNo ratings yet
- Prachi Uniqueness of Human BeingDocument19 pagesPrachi Uniqueness of Human BeingasifanisNo ratings yet
- A Cognitive Experimental Approach To Understanding and Reducing Food CravingsDocument5 pagesA Cognitive Experimental Approach To Understanding and Reducing Food CravingsyodoidNo ratings yet
- Project Muse 42646 PDFDocument27 pagesProject Muse 42646 PDFKaustav RoyNo ratings yet
- Final Test Intermediate IIDocument2 pagesFinal Test Intermediate IIHolly PadillaNo ratings yet
- CFD Modeling of Spontaneous Heating in A Large-Scale Coal ChamberDocument8 pagesCFD Modeling of Spontaneous Heating in A Large-Scale Coal ChamberdenichezNo ratings yet
- 10 1108 - Bij 03 2023 0131Document19 pages10 1108 - Bij 03 2023 0131Teguh SetiawanNo ratings yet
- Book Launch StrategyDocument1 pageBook Launch StrategyNurain KhalilullahNo ratings yet
- Booklet N219 REV JAN 2018 PDFDocument10 pagesBooklet N219 REV JAN 2018 PDFGuntara WigunaNo ratings yet
- 1970 (198p) Light and Electromagnetism Project Physics Text and Handbook 4 1970Document198 pages1970 (198p) Light and Electromagnetism Project Physics Text and Handbook 4 1970jgf31No ratings yet
- Engaging Generation ZDocument9 pagesEngaging Generation Zghoster33No ratings yet
- Is 40 The New 60? - Hacker NewsDocument21 pagesIs 40 The New 60? - Hacker NewsabcNo ratings yet
- Ngec5 ModuleDocument133 pagesNgec5 ModuleTheodore GrandeNo ratings yet
- Test PaperDocument8 pagesTest PaperGim SiewNo ratings yet
- Solution Manual For Computer Accounting With Quickbooks 2018 18th Edition Donna Kay 2Document12 pagesSolution Manual For Computer Accounting With Quickbooks 2018 18th Edition Donna Kay 2guadaluperomerojz6s100% (21)
- Stani Memorial College of Engineering & Technology: B.Tech. Programme Under RTU, KotaDocument2 pagesStani Memorial College of Engineering & Technology: B.Tech. Programme Under RTU, KotaSourabh GuptaNo ratings yet
- HdvoiceDocument9 pagesHdvoicesanjay3544No ratings yet
- HVAC Value EngineeringDocument2 pagesHVAC Value EngineeringamarandmoazNo ratings yet
- Resume Jurnal GeolistrikDocument6 pagesResume Jurnal GeolistrikbidaraaaNo ratings yet
- Excel Lab 3: Euler's MethodDocument12 pagesExcel Lab 3: Euler's Methodkrishanu1aNo ratings yet
- Cover LetterDocument1 pageCover Letterdamjad583No ratings yet
- Onyxworks NFN GW PC PDFDocument28 pagesOnyxworks NFN GW PC PDFNguyen Thai SonNo ratings yet
- MOC PresentationDocument12 pagesMOC PresentationaxlpceNo ratings yet
- Fujitsu LifeBook S7110 - S7111 Rev03 Schematic DiagramDocument91 pagesFujitsu LifeBook S7110 - S7111 Rev03 Schematic DiagramWell Well WellNo ratings yet
- Control Towers: What Every Executive Needs To Know AboutDocument8 pagesControl Towers: What Every Executive Needs To Know AboutAlberto VasquezNo ratings yet