
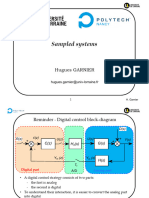
The Pulse Transfer Function: Convolution Summation
The Pulse Transfer Function: Convolution Summation
You might also like
- Physical LimnologyDocument173 pagesPhysical LimnologyJuan Pablo Ramirez MonsalveNo ratings yet
- Control 2 Lec4Document13 pagesControl 2 Lec4Ahmed YounisNo ratings yet
- 2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHDocument4 pages2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHYassine DjillaliNo ratings yet
- EP 5511 - Lecture 09Document23 pagesEP 5511 - Lecture 09Solomon Tadesse AthlawNo ratings yet
- Reconstruction PDFDocument13 pagesReconstruction PDFRamaDinakaranNo ratings yet
- Lecture 2Document12 pagesLecture 2Lucas SantosNo ratings yet
- Preface: Euler-Lagrange EquationDocument10 pagesPreface: Euler-Lagrange Equationadambose1990No ratings yet
- Transfer FunctionsDocument14 pagesTransfer FunctionsMagNo ratings yet
- Updated Module 4Document117 pagesUpdated Module 4zapzahtNo ratings yet
- D-Sampled SystemsDocument16 pagesD-Sampled Systemsbbb bbbNo ratings yet
- 6 Signals Systems (2021-2022)Document25 pages6 Signals Systems (2021-2022)Ehmed BazNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument38 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Linear System Theory: Dr. Vali UddinDocument27 pagesLinear System Theory: Dr. Vali UddinMuhammad HassanNo ratings yet
- Discrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazaDocument27 pagesDiscrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazadeepthiNo ratings yet
- Sigsys Lec 3 CH 3aDocument27 pagesSigsys Lec 3 CH 3aRutu ThakkarNo ratings yet
- 13 - Digital Controller DesignDocument22 pages13 - Digital Controller DesignEverton CollingNo ratings yet
- System Representation: - Where The Input Signal Is of Z-TransformDocument36 pagesSystem Representation: - Where The Input Signal Is of Z-TransformPallavi NalawadeNo ratings yet
- Z Plane AnalizDocument47 pagesZ Plane Analizysm111No ratings yet
- Dynamical SystemsDocument18 pagesDynamical Systemshung kungNo ratings yet
- M475 - c2 - L4 - Z TransformDocument8 pagesM475 - c2 - L4 - Z TransformAli AlmakhmariNo ratings yet
- Transfer Functions: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument14 pagesTransfer Functions: Dept. of Electrical and Computer Engineering The University of Texas at Austinrahul rocksNo ratings yet
- T Du T CX T y T Bu T Ax T X: Mathematical Representation of Linear SystemsDocument25 pagesT Du T CX T y T Bu T Ax T X: Mathematical Representation of Linear SystemsderalikerNo ratings yet
- Discrete and Hybrid Systems: 3.1: Laplace Transform of Ideal SamplerDocument25 pagesDiscrete and Hybrid Systems: 3.1: Laplace Transform of Ideal SamplerOmnia TaalabNo ratings yet
- Unit1 PDFDocument72 pagesUnit1 PDFRiddhijit ChattopadhyayNo ratings yet
- MHS11 Z TransformDocument16 pagesMHS11 Z TransformHassan El-kholyNo ratings yet
- Dupire Functional ItoDocument43 pagesDupire Functional ItoRayan RayanNo ratings yet
- Partial Differential Equations (Pde)Document84 pagesPartial Differential Equations (Pde)潘詠潤No ratings yet
- Convolution and CorrelationDocument11 pagesConvolution and CorrelationShameer KhanNo ratings yet
- 77287Document22 pages77287Barani DharanNo ratings yet
- M475 - c2 - L3 - Digital Control SystemsDocument8 pagesM475 - c2 - L3 - Digital Control SystemsAli AlmakhmariNo ratings yet
- EEE223 Signals & Systems Fall 2010Document12 pagesEEE223 Signals & Systems Fall 2010Muhammad Usman GhaniNo ratings yet
- Transmission 4Document13 pagesTransmission 4Wael YoussefNo ratings yet
- Wavelets and Multi-Resolution ProcessingDocument31 pagesWavelets and Multi-Resolution ProcessingsrichitsNo ratings yet
- (Non-Periodic Signals) : Fourier TransformDocument33 pages(Non-Periodic Signals) : Fourier TransformPragya ChakshooNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω t1MV20EE016 BHUVAN PMNo ratings yet
- 2 2.transfer FunctionDocument60 pages2 2.transfer FunctionEngenheiro TeslandoNo ratings yet
- Lec5 Wavelets and Multiresolution AnalysisDocument55 pagesLec5 Wavelets and Multiresolution AnalysisRitunjay GuptaNo ratings yet
- sns 2021 기말 (온라인)Document2 pagessns 2021 기말 (온라인)juyeons0204No ratings yet
- Markov Processes and Birth-Death Processes: J. M. AkinpeluDocument37 pagesMarkov Processes and Birth-Death Processes: J. M. AkinpeluvasudevanyNo ratings yet
- Hilbert TransformDocument12 pagesHilbert TransformSaid samimullah NooriNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω tarashixNo ratings yet
- Tema - 8 - Sistemas - Primer y Segundo Orden (English)Document42 pagesTema - 8 - Sistemas - Primer y Segundo Orden (English)Kevin Eduardo MartinezNo ratings yet
- Lecture 3 Modeling (Ii) - State Space ApproachDocument19 pagesLecture 3 Modeling (Ii) - State Space ApproachAum4Eng HelpNo ratings yet
- EE402 Lecture 2Document10 pagesEE402 Lecture 2sdfgNo ratings yet
- CH 07Document51 pagesCH 07陳浚維No ratings yet
- Discrete-Time Systems: Discretization, Models and Their PropertiesDocument66 pagesDiscrete-Time Systems: Discretization, Models and Their PropertiesbalkyderNo ratings yet
- Retenedor de Orden CeroDocument21 pagesRetenedor de Orden CeroLuis Miguel BarrenoNo ratings yet
- Final S23 Sol v2Document10 pagesFinal S23 Sol v2joshuaNo ratings yet
- Signal SpaceDocument3 pagesSignal SpaceAbhishek_SafuiNo ratings yet
- Random Processes: IntroductionDocument54 pagesRandom Processes: IntroductionAnesia AlferdoNo ratings yet
- Convolution and Correlation - TutorialspointDocument12 pagesConvolution and Correlation - TutorialspointSavita BhosleNo ratings yet
- Problem Set 1 SolutionDocument8 pagesProblem Set 1 SolutionChahat NegiNo ratings yet
- Modeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelDocument5 pagesModeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelYassine DjillaliNo ratings yet
- Integrals of Vector Fields Over Lines/curves and Surfaces - Prac:ce With Stokes (Green), GaussDocument44 pagesIntegrals of Vector Fields Over Lines/curves and Surfaces - Prac:ce With Stokes (Green), GausssFDfdsNo ratings yet
- Chapter 5Document64 pagesChapter 5HaniNo ratings yet
- ECEG 5352 - Lecture - 4 PDFDocument23 pagesECEG 5352 - Lecture - 4 PDFmulukenNo ratings yet
- Assignment#2Document2 pagesAssignment#2vaishnaviNo ratings yet
- HW - 2 Solutions (Draft)Document6 pagesHW - 2 Solutions (Draft)Hamid RasulNo ratings yet
- Dissimilar PDFDocument3 pagesDissimilar PDFJavi FumanalNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- EXPERIMENT 11: Uni-Junction Transistor (UJT) CHARACTERISTICSDocument4 pagesEXPERIMENT 11: Uni-Junction Transistor (UJT) CHARACTERISTICSdilawar sumraNo ratings yet
- Pe NotesDocument196 pagesPe Notesdilawar sumraNo ratings yet
- CLT (150073110016)Document11 pagesCLT (150073110016)dilawar sumraNo ratings yet
- π/4 -Quadrature Phase Shift Keying: Presentation by: DILAWAR SUMRA (150073110023)Document12 pagesπ/4 -Quadrature Phase Shift Keying: Presentation by: DILAWAR SUMRA (150073110023)dilawar sumraNo ratings yet
- Gujarat Technological University: InstructionsDocument26 pagesGujarat Technological University: Instructionsdilawar sumraNo ratings yet
- Probability & Cumulative Distribution Functions: Yatin VasavaDocument39 pagesProbability & Cumulative Distribution Functions: Yatin Vasavadilawar sumraNo ratings yet
- Gujarat Technological University: InstructionsDocument26 pagesGujarat Technological University: Instructionsdilawar sumraNo ratings yet
- Science Form One - Introduction To ScienceDocument10 pagesScience Form One - Introduction To Scienceamyryuzaini100% (1)
- Compass and MagnetismDocument127 pagesCompass and MagnetismReynante P. Consul60% (5)
- Wax Pouring MachineDocument14 pagesWax Pouring MachineHarshul BrahmbhattNo ratings yet
- 01 Particle Sizing by Laser Difraction PDFDocument145 pages01 Particle Sizing by Laser Difraction PDFrohan satwaraNo ratings yet
- Grid Code Frequency Response Working Group System Inertia: Antony Johnson, System Technical PerformanceDocument17 pagesGrid Code Frequency Response Working Group System Inertia: Antony Johnson, System Technical PerformanceSajid AkhterNo ratings yet
- Mel 715: Gas Dynamics: A Passion of Doing Adventures Lead To A Hi-Fi Science and Technology!!!Document17 pagesMel 715: Gas Dynamics: A Passion of Doing Adventures Lead To A Hi-Fi Science and Technology!!!Arul SankaranNo ratings yet
- QIAamp DNA Mini Kit and QIAamp DNA Blood Mini Kit HandbookDocument68 pagesQIAamp DNA Mini Kit and QIAamp DNA Blood Mini Kit HandbookRodrigo CarmoNo ratings yet
- Sap 2 PerfDocument3 pagesSap 2 PerfPancho FigueroaNo ratings yet
- AvogadroDocument2 pagesAvogadroFerds SalvatierraNo ratings yet
- Post Tensioning DesignDocument4 pagesPost Tensioning DesignFrancisFengNo ratings yet
- BS Fall 2019 1st Semester-1 PDFDocument9 pagesBS Fall 2019 1st Semester-1 PDFAhmad BilalNo ratings yet
- Tension and Compression Testing of Fibre Reinforced Polymer (FRP) PDFDocument8 pagesTension and Compression Testing of Fibre Reinforced Polymer (FRP) PDFbladdeeNo ratings yet
- Grounding Design AnalysisDocument118 pagesGrounding Design Analysisreply2amit1986100% (4)
- Itee ReportDocument15 pagesItee ReportSarah SrhNo ratings yet
- Chapter 7Document30 pagesChapter 7Marcus NatividadesNo ratings yet
- DIANA Elements Spring 2010 PDFDocument9 pagesDIANA Elements Spring 2010 PDFAlessandroAleottiNo ratings yet
- Último DeberDocument9 pagesÚltimo DeberAndiko Villacis Navas100% (1)
- Unit 4 Governing Equations of Heat Conduction: StructureDocument45 pagesUnit 4 Governing Equations of Heat Conduction: StructurevmuthubharathNo ratings yet
- Paramatic Study PDFDocument359 pagesParamatic Study PDFSai KrishnaNo ratings yet
- Icf MD Spec 252 Cast Steel Side Buffer ArrgtDocument17 pagesIcf MD Spec 252 Cast Steel Side Buffer ArrgtDipak Kumar ChatterjeeNo ratings yet
- Chapter 03 Two Dimensional Problems in Elasticity - Ugural, FensterDocument50 pagesChapter 03 Two Dimensional Problems in Elasticity - Ugural, Fensteracanerk100% (6)
- Design of Raceway Ponds For Producing MicroalgaeDocument12 pagesDesign of Raceway Ponds For Producing MicroalgaeHafiz Anus AhmedNo ratings yet
- Zhang2016 PDFDocument14 pagesZhang2016 PDFHéctor Jorge Bravo PastorNo ratings yet
- Lecture 7 - Friction - NptelDocument18 pagesLecture 7 - Friction - Nptels_murugan02No ratings yet
- Basics of Seismic Wave TheoryDocument154 pagesBasics of Seismic Wave TheoryYinfeng Dong0% (1)
- Practice Test 8 Electric Forces Fields Gausss Law PotentialDocument20 pagesPractice Test 8 Electric Forces Fields Gausss Law PotentialLynn Hollenbeck BreindelNo ratings yet
- Modern Approach To Earthing System Design and Its AnalysisDocument7 pagesModern Approach To Earthing System Design and Its AnalysisDoly DamanikNo ratings yet
- Stabilization of CL and CI Soil Using Sugarcane Bagasse Ash and Quarry DustDocument5 pagesStabilization of CL and CI Soil Using Sugarcane Bagasse Ash and Quarry DustInternational Journal of Innovative Science and Research TechnologyNo ratings yet





























































































Download as pdf or txt
You might also like
- Physical LimnologyDocument173 pagesPhysical LimnologyJuan Pablo Ramirez MonsalveNo ratings yet
- Control 2 Lec4Document13 pagesControl 2 Lec4Ahmed YounisNo ratings yet
- 2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHDocument4 pages2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHYassine DjillaliNo ratings yet
- EP 5511 - Lecture 09Document23 pagesEP 5511 - Lecture 09Solomon Tadesse AthlawNo ratings yet
- Reconstruction PDFDocument13 pagesReconstruction PDFRamaDinakaranNo ratings yet
- Lecture 2Document12 pagesLecture 2Lucas SantosNo ratings yet
- Preface: Euler-Lagrange EquationDocument10 pagesPreface: Euler-Lagrange Equationadambose1990No ratings yet
- Transfer FunctionsDocument14 pagesTransfer FunctionsMagNo ratings yet
- Updated Module 4Document117 pagesUpdated Module 4zapzahtNo ratings yet
- D-Sampled SystemsDocument16 pagesD-Sampled Systemsbbb bbbNo ratings yet
- 6 Signals Systems (2021-2022)Document25 pages6 Signals Systems (2021-2022)Ehmed BazNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument38 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Linear System Theory: Dr. Vali UddinDocument27 pagesLinear System Theory: Dr. Vali UddinMuhammad HassanNo ratings yet
- Discrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazaDocument27 pagesDiscrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazadeepthiNo ratings yet
- Sigsys Lec 3 CH 3aDocument27 pagesSigsys Lec 3 CH 3aRutu ThakkarNo ratings yet
- 13 - Digital Controller DesignDocument22 pages13 - Digital Controller DesignEverton CollingNo ratings yet
- System Representation: - Where The Input Signal Is of Z-TransformDocument36 pagesSystem Representation: - Where The Input Signal Is of Z-TransformPallavi NalawadeNo ratings yet
- Z Plane AnalizDocument47 pagesZ Plane Analizysm111No ratings yet
- Dynamical SystemsDocument18 pagesDynamical Systemshung kungNo ratings yet
- M475 - c2 - L4 - Z TransformDocument8 pagesM475 - c2 - L4 - Z TransformAli AlmakhmariNo ratings yet
- Transfer Functions: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument14 pagesTransfer Functions: Dept. of Electrical and Computer Engineering The University of Texas at Austinrahul rocksNo ratings yet
- T Du T CX T y T Bu T Ax T X: Mathematical Representation of Linear SystemsDocument25 pagesT Du T CX T y T Bu T Ax T X: Mathematical Representation of Linear SystemsderalikerNo ratings yet
- Discrete and Hybrid Systems: 3.1: Laplace Transform of Ideal SamplerDocument25 pagesDiscrete and Hybrid Systems: 3.1: Laplace Transform of Ideal SamplerOmnia TaalabNo ratings yet
- Unit1 PDFDocument72 pagesUnit1 PDFRiddhijit ChattopadhyayNo ratings yet
- MHS11 Z TransformDocument16 pagesMHS11 Z TransformHassan El-kholyNo ratings yet
- Dupire Functional ItoDocument43 pagesDupire Functional ItoRayan RayanNo ratings yet
- Partial Differential Equations (Pde)Document84 pagesPartial Differential Equations (Pde)潘詠潤No ratings yet
- Convolution and CorrelationDocument11 pagesConvolution and CorrelationShameer KhanNo ratings yet
- 77287Document22 pages77287Barani DharanNo ratings yet
- M475 - c2 - L3 - Digital Control SystemsDocument8 pagesM475 - c2 - L3 - Digital Control SystemsAli AlmakhmariNo ratings yet
- EEE223 Signals & Systems Fall 2010Document12 pagesEEE223 Signals & Systems Fall 2010Muhammad Usman GhaniNo ratings yet
- Transmission 4Document13 pagesTransmission 4Wael YoussefNo ratings yet
- Wavelets and Multi-Resolution ProcessingDocument31 pagesWavelets and Multi-Resolution ProcessingsrichitsNo ratings yet
- (Non-Periodic Signals) : Fourier TransformDocument33 pages(Non-Periodic Signals) : Fourier TransformPragya ChakshooNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω t1MV20EE016 BHUVAN PMNo ratings yet
- 2 2.transfer FunctionDocument60 pages2 2.transfer FunctionEngenheiro TeslandoNo ratings yet
- Lec5 Wavelets and Multiresolution AnalysisDocument55 pagesLec5 Wavelets and Multiresolution AnalysisRitunjay GuptaNo ratings yet
- sns 2021 기말 (온라인)Document2 pagessns 2021 기말 (온라인)juyeons0204No ratings yet
- Markov Processes and Birth-Death Processes: J. M. AkinpeluDocument37 pagesMarkov Processes and Birth-Death Processes: J. M. AkinpeluvasudevanyNo ratings yet
- Hilbert TransformDocument12 pagesHilbert TransformSaid samimullah NooriNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω tarashixNo ratings yet
- Tema - 8 - Sistemas - Primer y Segundo Orden (English)Document42 pagesTema - 8 - Sistemas - Primer y Segundo Orden (English)Kevin Eduardo MartinezNo ratings yet
- Lecture 3 Modeling (Ii) - State Space ApproachDocument19 pagesLecture 3 Modeling (Ii) - State Space ApproachAum4Eng HelpNo ratings yet
- EE402 Lecture 2Document10 pagesEE402 Lecture 2sdfgNo ratings yet
- CH 07Document51 pagesCH 07陳浚維No ratings yet
- Discrete-Time Systems: Discretization, Models and Their PropertiesDocument66 pagesDiscrete-Time Systems: Discretization, Models and Their PropertiesbalkyderNo ratings yet
- Retenedor de Orden CeroDocument21 pagesRetenedor de Orden CeroLuis Miguel BarrenoNo ratings yet
- Final S23 Sol v2Document10 pagesFinal S23 Sol v2joshuaNo ratings yet
- Signal SpaceDocument3 pagesSignal SpaceAbhishek_SafuiNo ratings yet
- Random Processes: IntroductionDocument54 pagesRandom Processes: IntroductionAnesia AlferdoNo ratings yet
- Convolution and Correlation - TutorialspointDocument12 pagesConvolution and Correlation - TutorialspointSavita BhosleNo ratings yet
- Problem Set 1 SolutionDocument8 pagesProblem Set 1 SolutionChahat NegiNo ratings yet
- Modeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelDocument5 pagesModeling of Sampled-Data Control Systems: 1 Ideal Sampling and The ADC ModelYassine DjillaliNo ratings yet
- Integrals of Vector Fields Over Lines/curves and Surfaces - Prac:ce With Stokes (Green), GaussDocument44 pagesIntegrals of Vector Fields Over Lines/curves and Surfaces - Prac:ce With Stokes (Green), GausssFDfdsNo ratings yet
- Chapter 5Document64 pagesChapter 5HaniNo ratings yet
- ECEG 5352 - Lecture - 4 PDFDocument23 pagesECEG 5352 - Lecture - 4 PDFmulukenNo ratings yet
- Assignment#2Document2 pagesAssignment#2vaishnaviNo ratings yet
- HW - 2 Solutions (Draft)Document6 pagesHW - 2 Solutions (Draft)Hamid RasulNo ratings yet
- Dissimilar PDFDocument3 pagesDissimilar PDFJavi FumanalNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- EXPERIMENT 11: Uni-Junction Transistor (UJT) CHARACTERISTICSDocument4 pagesEXPERIMENT 11: Uni-Junction Transistor (UJT) CHARACTERISTICSdilawar sumraNo ratings yet
- Pe NotesDocument196 pagesPe Notesdilawar sumraNo ratings yet
- CLT (150073110016)Document11 pagesCLT (150073110016)dilawar sumraNo ratings yet
- π/4 -Quadrature Phase Shift Keying: Presentation by: DILAWAR SUMRA (150073110023)Document12 pagesπ/4 -Quadrature Phase Shift Keying: Presentation by: DILAWAR SUMRA (150073110023)dilawar sumraNo ratings yet
- Gujarat Technological University: InstructionsDocument26 pagesGujarat Technological University: Instructionsdilawar sumraNo ratings yet
- Probability & Cumulative Distribution Functions: Yatin VasavaDocument39 pagesProbability & Cumulative Distribution Functions: Yatin Vasavadilawar sumraNo ratings yet
- Gujarat Technological University: InstructionsDocument26 pagesGujarat Technological University: Instructionsdilawar sumraNo ratings yet
- Science Form One - Introduction To ScienceDocument10 pagesScience Form One - Introduction To Scienceamyryuzaini100% (1)
- Compass and MagnetismDocument127 pagesCompass and MagnetismReynante P. Consul60% (5)
- Wax Pouring MachineDocument14 pagesWax Pouring MachineHarshul BrahmbhattNo ratings yet
- 01 Particle Sizing by Laser Difraction PDFDocument145 pages01 Particle Sizing by Laser Difraction PDFrohan satwaraNo ratings yet
- Grid Code Frequency Response Working Group System Inertia: Antony Johnson, System Technical PerformanceDocument17 pagesGrid Code Frequency Response Working Group System Inertia: Antony Johnson, System Technical PerformanceSajid AkhterNo ratings yet
- Mel 715: Gas Dynamics: A Passion of Doing Adventures Lead To A Hi-Fi Science and Technology!!!Document17 pagesMel 715: Gas Dynamics: A Passion of Doing Adventures Lead To A Hi-Fi Science and Technology!!!Arul SankaranNo ratings yet
- QIAamp DNA Mini Kit and QIAamp DNA Blood Mini Kit HandbookDocument68 pagesQIAamp DNA Mini Kit and QIAamp DNA Blood Mini Kit HandbookRodrigo CarmoNo ratings yet
- Sap 2 PerfDocument3 pagesSap 2 PerfPancho FigueroaNo ratings yet
- AvogadroDocument2 pagesAvogadroFerds SalvatierraNo ratings yet
- Post Tensioning DesignDocument4 pagesPost Tensioning DesignFrancisFengNo ratings yet
- BS Fall 2019 1st Semester-1 PDFDocument9 pagesBS Fall 2019 1st Semester-1 PDFAhmad BilalNo ratings yet
- Tension and Compression Testing of Fibre Reinforced Polymer (FRP) PDFDocument8 pagesTension and Compression Testing of Fibre Reinforced Polymer (FRP) PDFbladdeeNo ratings yet
- Grounding Design AnalysisDocument118 pagesGrounding Design Analysisreply2amit1986100% (4)
- Itee ReportDocument15 pagesItee ReportSarah SrhNo ratings yet
- Chapter 7Document30 pagesChapter 7Marcus NatividadesNo ratings yet
- DIANA Elements Spring 2010 PDFDocument9 pagesDIANA Elements Spring 2010 PDFAlessandroAleottiNo ratings yet
- Último DeberDocument9 pagesÚltimo DeberAndiko Villacis Navas100% (1)
- Unit 4 Governing Equations of Heat Conduction: StructureDocument45 pagesUnit 4 Governing Equations of Heat Conduction: StructurevmuthubharathNo ratings yet
- Paramatic Study PDFDocument359 pagesParamatic Study PDFSai KrishnaNo ratings yet
- Icf MD Spec 252 Cast Steel Side Buffer ArrgtDocument17 pagesIcf MD Spec 252 Cast Steel Side Buffer ArrgtDipak Kumar ChatterjeeNo ratings yet
- Chapter 03 Two Dimensional Problems in Elasticity - Ugural, FensterDocument50 pagesChapter 03 Two Dimensional Problems in Elasticity - Ugural, Fensteracanerk100% (6)
- Design of Raceway Ponds For Producing MicroalgaeDocument12 pagesDesign of Raceway Ponds For Producing MicroalgaeHafiz Anus AhmedNo ratings yet
- Zhang2016 PDFDocument14 pagesZhang2016 PDFHéctor Jorge Bravo PastorNo ratings yet
- Lecture 7 - Friction - NptelDocument18 pagesLecture 7 - Friction - Nptels_murugan02No ratings yet
- Basics of Seismic Wave TheoryDocument154 pagesBasics of Seismic Wave TheoryYinfeng Dong0% (1)
- Practice Test 8 Electric Forces Fields Gausss Law PotentialDocument20 pagesPractice Test 8 Electric Forces Fields Gausss Law PotentialLynn Hollenbeck BreindelNo ratings yet
- Modern Approach To Earthing System Design and Its AnalysisDocument7 pagesModern Approach To Earthing System Design and Its AnalysisDoly DamanikNo ratings yet
- Stabilization of CL and CI Soil Using Sugarcane Bagasse Ash and Quarry DustDocument5 pagesStabilization of CL and CI Soil Using Sugarcane Bagasse Ash and Quarry DustInternational Journal of Innovative Science and Research TechnologyNo ratings yet