
Ntrol Induction Motors by AC Voltage Controllers: N Nmo R o L L
Ntrol Induction Motors by AC Voltage Controllers: N Nmo R o L L
You might also like
- Electrical Drive - LAB-ManualDocument31 pagesElectrical Drive - LAB-Manualanil patelNo ratings yet
- P. C. Sen - Principles of Electric Machines 2edDocument634 pagesP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- ED LAB ManualDocument31 pagesED LAB Manualmanoj kumar100% (1)
- Ups 3Document32 pagesUps 3abdulkadhir100% (1)
- ASTM 6365 - 99 - Spark TestDocument4 pagesASTM 6365 - 99 - Spark Testjudith_ayala_10No ratings yet
- 25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesDocument16 pages25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesATULYA ALOK 17BEE0065No ratings yet
- Single Phase Semi ConverterDocument18 pagesSingle Phase Semi Convertermohamed enanyNo ratings yet
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- IEC Exam 2023Document15 pagesIEC Exam 2023Phyo KoNo ratings yet
- Power Electronics Book Part 2 PDFDocument379 pagesPower Electronics Book Part 2 PDFHorch Mohamed50% (2)
- Chapter 07Document38 pagesChapter 07Umair Hassan100% (2)
- EE 410 Lab1 Fall10-1305411901Document27 pagesEE 410 Lab1 Fall10-1305411901Mohamad SyazwanNo ratings yet
- Power Electronics Lab Experiment-No. 6 Single-Phase Full and Half Wave Controlled SCR Rectifier Aim: To Study and Analyze The Properties and The Characteristics of A Single-PhaseDocument6 pagesPower Electronics Lab Experiment-No. 6 Single-Phase Full and Half Wave Controlled SCR Rectifier Aim: To Study and Analyze The Properties and The Characteristics of A Single-Phaseحسن علي جاسمNo ratings yet
- EECE370 Q2 F11 Key PostDocument7 pagesEECE370 Q2 F11 Key PosttelNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- EXPERIMENT Induction MotorDocument10 pagesEXPERIMENT Induction MotorMohamed Meeran100% (1)
- Machines Dcmotors 2 April 14Document20 pagesMachines Dcmotors 2 April 14Pola RismaNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- Exp3 Three Phase RectifierDocument3 pagesExp3 Three Phase RectifierNayanaKumarNo ratings yet
- Matlab/Simulink Models For Typical Soft Starting Means For A DC MotorDocument6 pagesMatlab/Simulink Models For Typical Soft Starting Means For A DC MotorkensesanNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- No Load and Block Rotor Test: Premier Trading CorporationDocument11 pagesNo Load and Block Rotor Test: Premier Trading CorporationKsr Akhil100% (1)
- Unit 2 - ED - 2ND PARTDocument21 pagesUnit 2 - ED - 2ND PARTMohit L.E. 008No ratings yet
- No Load and Block Rotor Test 3 PH Ind Motor DolDocument14 pagesNo Load and Block Rotor Test 3 PH Ind Motor DolalexNo ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FDheeraj KumarNo ratings yet
- AGN071 - Load Sharing With Quadrature LoopDocument5 pagesAGN071 - Load Sharing With Quadrature LoopQuang PhamNo ratings yet
- High Power CycloconverterDocument7 pagesHigh Power Cycloconverternapster26No ratings yet
- Machine Lab Sheet 01Document10 pagesMachine Lab Sheet 01RafsanNo ratings yet
- DC & AC DrivesDocument12 pagesDC & AC DrivesPKNo ratings yet
- 5.0 DC Machines: Basic Electrical Engineering ELE 290Document20 pages5.0 DC Machines: Basic Electrical Engineering ELE 290Harizx SaufixNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- Gas Turbine Generator: Chapter-7Document6 pagesGas Turbine Generator: Chapter-7GAGANNo ratings yet
- Controlled RectifiersDocument19 pagesControlled Rectifiersbalaji1986No ratings yet
- PS-II Lab ManualDocument69 pagesPS-II Lab ManualChilla DivyaNo ratings yet
- D Unit 3Document11 pagesD Unit 3Abhishek ShyamalNo ratings yet
- Three Phase DC To Ac InverterDocument44 pagesThree Phase DC To Ac Inverternoor deen100% (1)
- 3 Line ConverterDocument10 pages3 Line ConverterJay Romar PabianiaNo ratings yet
- Synchmachine 1Document28 pagesSynchmachine 1krn260026No ratings yet
- The Simplified Circle DiagramDocument5 pagesThe Simplified Circle DiagramPradeep RajasekeranNo ratings yet
- Experiment 1 (The Three Phase Alternator)Document11 pagesExperiment 1 (The Three Phase Alternator)Onofre Algara Jr.100% (4)
- Manual Ee ViDocument68 pagesManual Ee ViAkhilesh Kumar MishraNo ratings yet
- EECE 370 Problems From Similar/Previous ExamsDocument4 pagesEECE 370 Problems From Similar/Previous ExamsKent Martin D. CartagenaNo ratings yet
- 2.2 Conventional Methods of Speed Control: Unit-Ii DC DrivesDocument47 pages2.2 Conventional Methods of Speed Control: Unit-Ii DC DrivesrajeshNo ratings yet
- Bahan Bacaan Minggu 5 Dan 6 Dan 7 Dari Hal 19-30Document12 pagesBahan Bacaan Minggu 5 Dan 6 Dan 7 Dari Hal 19-30ilvinirma35No ratings yet
- Synchronous Generator TrainerDocument6 pagesSynchronous Generator TrainerBabyNo ratings yet
- SBO240 Product BulletinDocument8 pagesSBO240 Product BulletinMarianoNo ratings yet
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- A Single Phase To Three Phase Power Converter For Motor Drive ApDocument8 pagesA Single Phase To Three Phase Power Converter For Motor Drive Apmd naufallNo ratings yet
- Expt. 9 Single Phase Bridge Inverter: Aim of The ExperimentDocument8 pagesExpt. 9 Single Phase Bridge Inverter: Aim of The ExperimentUtpanna HotaNo ratings yet
- The Dynamic Response of A Linear Brushless D.C. S. MoghaniDocument4 pagesThe Dynamic Response of A Linear Brushless D.C. S. Moghaniflorin91No ratings yet
- Electrical Machines II LAB MANUALDocument45 pagesElectrical Machines II LAB MANUALram kumarNo ratings yet
- Chapter Three - Review of DC-AC InvertersDocument93 pagesChapter Three - Review of DC-AC Inverterskhadarf420No ratings yet
- Em Lab-II ManualDocument45 pagesEm Lab-II Manualrkadiraj701160% (5)
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Acute Rheumatic Fever - Clinical Manifestations and Diagnosis - UpToDateDocument15 pagesAcute Rheumatic Fever - Clinical Manifestations and Diagnosis - UpToDateDannyGutierrezNo ratings yet
- Coitus ReservatusDocument4 pagesCoitus ReservatusTrà Thanh NguyễnNo ratings yet
- Spot LightDocument216 pagesSpot LightCristopherZartaNo ratings yet
- Communication and Ethics in Pharmacy Practice: What Is To BeDocument23 pagesCommunication and Ethics in Pharmacy Practice: What Is To BeMuhammad RezaNo ratings yet
- Peugeot 607 Owners Manual 2005Document206 pagesPeugeot 607 Owners Manual 2005AndreiNo ratings yet
- ISC BiotechnologyDocument6 pagesISC BiotechnologySamikshaNo ratings yet
- Alm, Car BaselDocument4 pagesAlm, Car BaselAayush RawatNo ratings yet
- Bosch ManualDocument56 pagesBosch Manualjhon manuel de jesus100% (1)
- Layering With Colored PencilsDocument2 pagesLayering With Colored PencilsfrankcarabanoNo ratings yet
- Pentavitin - DSMDocument3 pagesPentavitin - DSMRnD Roi SuryaNo ratings yet
- Quiet Healing Center Auroville PDFDocument7 pagesQuiet Healing Center Auroville PDFananya k sNo ratings yet
- How To Find Inner PeaceDocument5 pagesHow To Find Inner Peacedivya shindeNo ratings yet
- Azeem, Et Al ('21) - Tea Leaves Biochar As A Carrier of Bacillus Cereus Improves The Soil Function And.. (ASE)Document13 pagesAzeem, Et Al ('21) - Tea Leaves Biochar As A Carrier of Bacillus Cereus Improves The Soil Function And.. (ASE)aida-69No ratings yet
- Supreme Court Case Analysis - Vishaka and Ors v. State of Rajasthan and Ors by - Kavisha Gupta - Latest LawsDocument2 pagesSupreme Court Case Analysis - Vishaka and Ors v. State of Rajasthan and Ors by - Kavisha Gupta - Latest LawsAdv Akshay KshirsagarNo ratings yet
- Domestic ViolenceDocument17 pagesDomestic ViolenceKhairul IdzwanNo ratings yet
- Thermostats,: Type KPDocument12 pagesThermostats,: Type KPEvandro Jva compressoresNo ratings yet
- Ethics in Healthcare Setting (Therapy)Document10 pagesEthics in Healthcare Setting (Therapy)Milcah ShabanjiNo ratings yet
- Olea Europaea A Phyto-Pharmacological ReviewDocument5 pagesOlea Europaea A Phyto-Pharmacological ReviewyigalbyNo ratings yet
- Anxiety DisordersDocument10 pagesAnxiety DisordersAhmed AntarNo ratings yet
- Family Life Group 9Document32 pagesFamily Life Group 9Quỳnh AngNo ratings yet
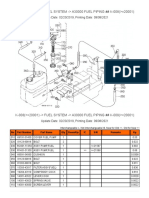
- K-008 ( 20001) - Fuel System - A30000 Fuel Piping ## K-008 ( 20001)Document2 pagesK-008 ( 20001) - Fuel System - A30000 Fuel Piping ## K-008 ( 20001)Martin LindbergNo ratings yet
- Aboriginal Cultural Competence 2008Document58 pagesAboriginal Cultural Competence 2008noddyNo ratings yet
- What Are The Expected Tasks You Have Successfully AccomplishedDocument1 pageWhat Are The Expected Tasks You Have Successfully AccomplishedImmortality Realm67% (18)
- Adverse Effects of Gadgets On KidsDocument1 pageAdverse Effects of Gadgets On Kidsnicole bejasaNo ratings yet
- Analette Manual Service Rev. D 2-6-08Document149 pagesAnalette Manual Service Rev. D 2-6-08RosanaCriolloNo ratings yet
- International StandardDocument8 pagesInternational Standardnazrul islamNo ratings yet
- Supply Chain Risk Management - A Literature Review (Final)Document55 pagesSupply Chain Risk Management - A Literature Review (Final)Rizki Agam SyahputraNo ratings yet
- TP. 2 REVISION PTE SIMPLE - Grammar ExcercisesDocument3 pagesTP. 2 REVISION PTE SIMPLE - Grammar ExcercisesgabyNo ratings yet
























































































Download as pdf or txt
You might also like
- Electrical Drive - LAB-ManualDocument31 pagesElectrical Drive - LAB-Manualanil patelNo ratings yet
- P. C. Sen - Principles of Electric Machines 2edDocument634 pagesP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- ED LAB ManualDocument31 pagesED LAB Manualmanoj kumar100% (1)
- Ups 3Document32 pagesUps 3abdulkadhir100% (1)
- ASTM 6365 - 99 - Spark TestDocument4 pagesASTM 6365 - 99 - Spark Testjudith_ayala_10No ratings yet
- 25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesDocument16 pages25-Feb-2020 11B Converter Fed and Chopper Fed DC DrivesATULYA ALOK 17BEE0065No ratings yet
- Single Phase Semi ConverterDocument18 pagesSingle Phase Semi Convertermohamed enanyNo ratings yet
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- IEC Exam 2023Document15 pagesIEC Exam 2023Phyo KoNo ratings yet
- Power Electronics Book Part 2 PDFDocument379 pagesPower Electronics Book Part 2 PDFHorch Mohamed50% (2)
- Chapter 07Document38 pagesChapter 07Umair Hassan100% (2)
- EE 410 Lab1 Fall10-1305411901Document27 pagesEE 410 Lab1 Fall10-1305411901Mohamad SyazwanNo ratings yet
- Power Electronics Lab Experiment-No. 6 Single-Phase Full and Half Wave Controlled SCR Rectifier Aim: To Study and Analyze The Properties and The Characteristics of A Single-PhaseDocument6 pagesPower Electronics Lab Experiment-No. 6 Single-Phase Full and Half Wave Controlled SCR Rectifier Aim: To Study and Analyze The Properties and The Characteristics of A Single-Phaseحسن علي جاسمNo ratings yet
- EECE370 Q2 F11 Key PostDocument7 pagesEECE370 Q2 F11 Key PosttelNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- EXPERIMENT Induction MotorDocument10 pagesEXPERIMENT Induction MotorMohamed Meeran100% (1)
- Machines Dcmotors 2 April 14Document20 pagesMachines Dcmotors 2 April 14Pola RismaNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- Exp3 Three Phase RectifierDocument3 pagesExp3 Three Phase RectifierNayanaKumarNo ratings yet
- Matlab/Simulink Models For Typical Soft Starting Means For A DC MotorDocument6 pagesMatlab/Simulink Models For Typical Soft Starting Means For A DC MotorkensesanNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- No Load and Block Rotor Test: Premier Trading CorporationDocument11 pagesNo Load and Block Rotor Test: Premier Trading CorporationKsr Akhil100% (1)
- Unit 2 - ED - 2ND PARTDocument21 pagesUnit 2 - ED - 2ND PARTMohit L.E. 008No ratings yet
- No Load and Block Rotor Test 3 PH Ind Motor DolDocument14 pagesNo Load and Block Rotor Test 3 PH Ind Motor DolalexNo ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FDheeraj KumarNo ratings yet
- AGN071 - Load Sharing With Quadrature LoopDocument5 pagesAGN071 - Load Sharing With Quadrature LoopQuang PhamNo ratings yet
- High Power CycloconverterDocument7 pagesHigh Power Cycloconverternapster26No ratings yet
- Machine Lab Sheet 01Document10 pagesMachine Lab Sheet 01RafsanNo ratings yet
- DC & AC DrivesDocument12 pagesDC & AC DrivesPKNo ratings yet
- 5.0 DC Machines: Basic Electrical Engineering ELE 290Document20 pages5.0 DC Machines: Basic Electrical Engineering ELE 290Harizx SaufixNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- Gas Turbine Generator: Chapter-7Document6 pagesGas Turbine Generator: Chapter-7GAGANNo ratings yet
- Controlled RectifiersDocument19 pagesControlled Rectifiersbalaji1986No ratings yet
- PS-II Lab ManualDocument69 pagesPS-II Lab ManualChilla DivyaNo ratings yet
- D Unit 3Document11 pagesD Unit 3Abhishek ShyamalNo ratings yet
- Three Phase DC To Ac InverterDocument44 pagesThree Phase DC To Ac Inverternoor deen100% (1)
- 3 Line ConverterDocument10 pages3 Line ConverterJay Romar PabianiaNo ratings yet
- Synchmachine 1Document28 pagesSynchmachine 1krn260026No ratings yet
- The Simplified Circle DiagramDocument5 pagesThe Simplified Circle DiagramPradeep RajasekeranNo ratings yet
- Experiment 1 (The Three Phase Alternator)Document11 pagesExperiment 1 (The Three Phase Alternator)Onofre Algara Jr.100% (4)
- Manual Ee ViDocument68 pagesManual Ee ViAkhilesh Kumar MishraNo ratings yet
- EECE 370 Problems From Similar/Previous ExamsDocument4 pagesEECE 370 Problems From Similar/Previous ExamsKent Martin D. CartagenaNo ratings yet
- 2.2 Conventional Methods of Speed Control: Unit-Ii DC DrivesDocument47 pages2.2 Conventional Methods of Speed Control: Unit-Ii DC DrivesrajeshNo ratings yet
- Bahan Bacaan Minggu 5 Dan 6 Dan 7 Dari Hal 19-30Document12 pagesBahan Bacaan Minggu 5 Dan 6 Dan 7 Dari Hal 19-30ilvinirma35No ratings yet
- Synchronous Generator TrainerDocument6 pagesSynchronous Generator TrainerBabyNo ratings yet
- SBO240 Product BulletinDocument8 pagesSBO240 Product BulletinMarianoNo ratings yet
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- A Single Phase To Three Phase Power Converter For Motor Drive ApDocument8 pagesA Single Phase To Three Phase Power Converter For Motor Drive Apmd naufallNo ratings yet
- Expt. 9 Single Phase Bridge Inverter: Aim of The ExperimentDocument8 pagesExpt. 9 Single Phase Bridge Inverter: Aim of The ExperimentUtpanna HotaNo ratings yet
- The Dynamic Response of A Linear Brushless D.C. S. MoghaniDocument4 pagesThe Dynamic Response of A Linear Brushless D.C. S. Moghaniflorin91No ratings yet
- Electrical Machines II LAB MANUALDocument45 pagesElectrical Machines II LAB MANUALram kumarNo ratings yet
- Chapter Three - Review of DC-AC InvertersDocument93 pagesChapter Three - Review of DC-AC Inverterskhadarf420No ratings yet
- Em Lab-II ManualDocument45 pagesEm Lab-II Manualrkadiraj701160% (5)
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Acute Rheumatic Fever - Clinical Manifestations and Diagnosis - UpToDateDocument15 pagesAcute Rheumatic Fever - Clinical Manifestations and Diagnosis - UpToDateDannyGutierrezNo ratings yet
- Coitus ReservatusDocument4 pagesCoitus ReservatusTrà Thanh NguyễnNo ratings yet
- Spot LightDocument216 pagesSpot LightCristopherZartaNo ratings yet
- Communication and Ethics in Pharmacy Practice: What Is To BeDocument23 pagesCommunication and Ethics in Pharmacy Practice: What Is To BeMuhammad RezaNo ratings yet
- Peugeot 607 Owners Manual 2005Document206 pagesPeugeot 607 Owners Manual 2005AndreiNo ratings yet
- ISC BiotechnologyDocument6 pagesISC BiotechnologySamikshaNo ratings yet
- Alm, Car BaselDocument4 pagesAlm, Car BaselAayush RawatNo ratings yet
- Bosch ManualDocument56 pagesBosch Manualjhon manuel de jesus100% (1)
- Layering With Colored PencilsDocument2 pagesLayering With Colored PencilsfrankcarabanoNo ratings yet
- Pentavitin - DSMDocument3 pagesPentavitin - DSMRnD Roi SuryaNo ratings yet
- Quiet Healing Center Auroville PDFDocument7 pagesQuiet Healing Center Auroville PDFananya k sNo ratings yet
- How To Find Inner PeaceDocument5 pagesHow To Find Inner Peacedivya shindeNo ratings yet
- Azeem, Et Al ('21) - Tea Leaves Biochar As A Carrier of Bacillus Cereus Improves The Soil Function And.. (ASE)Document13 pagesAzeem, Et Al ('21) - Tea Leaves Biochar As A Carrier of Bacillus Cereus Improves The Soil Function And.. (ASE)aida-69No ratings yet
- Supreme Court Case Analysis - Vishaka and Ors v. State of Rajasthan and Ors by - Kavisha Gupta - Latest LawsDocument2 pagesSupreme Court Case Analysis - Vishaka and Ors v. State of Rajasthan and Ors by - Kavisha Gupta - Latest LawsAdv Akshay KshirsagarNo ratings yet
- Domestic ViolenceDocument17 pagesDomestic ViolenceKhairul IdzwanNo ratings yet
- Thermostats,: Type KPDocument12 pagesThermostats,: Type KPEvandro Jva compressoresNo ratings yet
- Ethics in Healthcare Setting (Therapy)Document10 pagesEthics in Healthcare Setting (Therapy)Milcah ShabanjiNo ratings yet
- Olea Europaea A Phyto-Pharmacological ReviewDocument5 pagesOlea Europaea A Phyto-Pharmacological ReviewyigalbyNo ratings yet
- Anxiety DisordersDocument10 pagesAnxiety DisordersAhmed AntarNo ratings yet
- Family Life Group 9Document32 pagesFamily Life Group 9Quỳnh AngNo ratings yet
- K-008 ( 20001) - Fuel System - A30000 Fuel Piping ## K-008 ( 20001)Document2 pagesK-008 ( 20001) - Fuel System - A30000 Fuel Piping ## K-008 ( 20001)Martin LindbergNo ratings yet
- Aboriginal Cultural Competence 2008Document58 pagesAboriginal Cultural Competence 2008noddyNo ratings yet
- What Are The Expected Tasks You Have Successfully AccomplishedDocument1 pageWhat Are The Expected Tasks You Have Successfully AccomplishedImmortality Realm67% (18)
- Adverse Effects of Gadgets On KidsDocument1 pageAdverse Effects of Gadgets On Kidsnicole bejasaNo ratings yet
- Analette Manual Service Rev. D 2-6-08Document149 pagesAnalette Manual Service Rev. D 2-6-08RosanaCriolloNo ratings yet
- International StandardDocument8 pagesInternational Standardnazrul islamNo ratings yet
- Supply Chain Risk Management - A Literature Review (Final)Document55 pagesSupply Chain Risk Management - A Literature Review (Final)Rizki Agam SyahputraNo ratings yet
- TP. 2 REVISION PTE SIMPLE - Grammar ExcercisesDocument3 pagesTP. 2 REVISION PTE SIMPLE - Grammar ExcercisesgabyNo ratings yet