Download as pdf or txt
You might also like
- The Dark ManDocument2 pagesThe Dark ManHyemi Mimi100% (1)
- Astm C 423Document12 pagesAstm C 423Abhinav AcharyaNo ratings yet
- Oedemeter Consolidation TestDocument24 pagesOedemeter Consolidation Testyashas sNo ratings yet
- Blood Sorcery Rites of Damnation Spell Casting SummaryDocument3 pagesBlood Sorcery Rites of Damnation Spell Casting SummaryZiggurathNo ratings yet
- The Design and Performance of The Retaining Walls at Newton StationDocument8 pagesThe Design and Performance of The Retaining Walls at Newton StationfreezefreezeNo ratings yet
- Comparison Between 2d and 3d Behaviour of Sheet Piles by Finite Element MethodDocument16 pagesComparison Between 2d and 3d Behaviour of Sheet Piles by Finite Element MethodtavialimNo ratings yet
- Decoding Eurocode 2 and 7 - Design of Concrete Foundations PDFDocument1 pageDecoding Eurocode 2 and 7 - Design of Concrete Foundations PDFcollins unankaNo ratings yet
- Geotechnical Annual Seminar 2012Document356 pagesGeotechnical Annual Seminar 2012Bobby WongNo ratings yet
- CV6311 Shear Strength Lect2 2012Document53 pagesCV6311 Shear Strength Lect2 2012ikanyu79No ratings yet
- CE5113 Lecture 3 - Design of Instrumentation SchemeDocument23 pagesCE5113 Lecture 3 - Design of Instrumentation SchemeandreashendiNo ratings yet
- 1515663254-19th ICSMGE Post Proceedings v2Document306 pages1515663254-19th ICSMGE Post Proceedings v2ThaungMyintNo ratings yet
- CV6311 Shear Strength Lect1 2012Document38 pagesCV6311 Shear Strength Lect1 2012ikanyu79No ratings yet
- Plate GirdersDocument57 pagesPlate GirderskumuthaNo ratings yet
- Lta DC M&W Wen DazhiDocument14 pagesLta DC M&W Wen Dazhijohnkoh99No ratings yet
- Effect of Organic Content On Compaction and Consolidation Characteristics of Lagos Organic ClayDocument11 pagesEffect of Organic Content On Compaction and Consolidation Characteristics of Lagos Organic ClayanjaliNo ratings yet
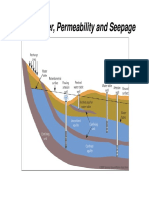
- Groundwater Permeability and Seepage Part 1 (Updated)Document22 pagesGroundwater Permeability and Seepage Part 1 (Updated)Steven KuaNo ratings yet
- ONG Chee Wee-PhD Thesis-2009-Centrifuge Model Study of Tunnel - Soil - Pile Interaction in Soft Clay PDFDocument327 pagesONG Chee Wee-PhD Thesis-2009-Centrifuge Model Study of Tunnel - Soil - Pile Interaction in Soft Clay PDFAnna SuuNo ratings yet
- The Influence of Plugging On DriveabilityDocument12 pagesThe Influence of Plugging On DriveabilityDedy DharmawansyahNo ratings yet
- Malaisie - DID Manual - Volume 6 - Geotechnical Manual, Site Investigation and SurveyDocument513 pagesMalaisie - DID Manual - Volume 6 - Geotechnical Manual, Site Investigation and Surveyscribd_geotec100% (1)
- CE5113 Lecture 2 - Geotechnical Instrumentation For Deep Excavation Works CITI (Color)Document90 pagesCE5113 Lecture 2 - Geotechnical Instrumentation For Deep Excavation Works CITI (Color)Nyan Oo100% (1)
- 2D and 3D Consolidation - Biot Theory (OCT2011)Document42 pages2D and 3D Consolidation - Biot Theory (OCT2011)bsitlerNo ratings yet
- Cid CiuDocument4 pagesCid CiuRazakMaidenNo ratings yet
- Soil Investigation at Land Expressway in Accordance With MS2038:2006Document7 pagesSoil Investigation at Land Expressway in Accordance With MS2038:2006sanusi69No ratings yet
- ELS Sample Questions For 2010 HKPU T3 Top Up Course PDFDocument2 pagesELS Sample Questions For 2010 HKPU T3 Top Up Course PDFYu chung yinNo ratings yet
- Lab Report 2 TotalDocument48 pagesLab Report 2 TotalAshlie Gross75% (4)
- 17 SM II Soil DynamicsDocument43 pages17 SM II Soil DynamicsAhmer MehmoodNo ratings yet
- Week3 Lecture Note Yi YaolinDocument67 pagesWeek3 Lecture Note Yi Yaolinchu yi haoNo ratings yet
- CV3013-Foundation Engineering: Associate Professor E.C. Leong Office: N1-1C-80 Tel: 6790 4774 Email: Cecleong@ntu - Edu.sgDocument52 pagesCV3013-Foundation Engineering: Associate Professor E.C. Leong Office: N1-1C-80 Tel: 6790 4774 Email: Cecleong@ntu - Edu.sgsunilaruna100% (1)
- A Comparison of Dynamic and Static Load Tests On Reinforced Concrete Driven Pile-2004 - 02Document7 pagesA Comparison of Dynamic and Static Load Tests On Reinforced Concrete Driven Pile-2004 - 02Hoo Yen HowNo ratings yet
- Institution of Civil Engineers (1988) Specification For Piling - Contract Documentation and MeasurementDocument35 pagesInstitution of Civil Engineers (1988) Specification For Piling - Contract Documentation and MeasurementBobNo ratings yet
- 041 - Slope - StabilityDocument33 pages041 - Slope - StabilityqaiseriqbalNo ratings yet
- Diaphragm/slurry Wall SpecificationDocument27 pagesDiaphragm/slurry Wall SpecificationRoy PersonalNo ratings yet
- Schmidt Hammer Type N L NR LR ManualDocument21 pagesSchmidt Hammer Type N L NR LR ManualLee Tai100% (1)
- Sustainability in Geotechnical Engineering, 2015 PDFDocument9 pagesSustainability in Geotechnical Engineering, 2015 PDFSergio Andres Martinez CamachoNo ratings yet
- Group 7 - Block B (Up To 28 Floors) Building & Structural ElementDocument3 pagesGroup 7 - Block B (Up To 28 Floors) Building & Structural ElementChung ChanNo ratings yet
- 2D and 3D Consolidation - Biot Theory (OCT2011 Color)Document42 pages2D and 3D Consolidation - Biot Theory (OCT2011 Color)bsitlerNo ratings yet
- Professor David NorburyDocument53 pagesProfessor David NorburylingamkumarNo ratings yet
- Pin ContentDocument20 pagesPin ContentSwetha100% (2)
- 9ARC1991 Vertical Drains Trial at Juru, Malaysia - Performance During Construction, 1991, ThailandDocument6 pages9ARC1991 Vertical Drains Trial at Juru, Malaysia - Performance During Construction, 1991, ThailandfreezefreezeNo ratings yet
- 1 Shear Strength & Slope Stability-IEM Lecture (22feb19) V2notes PDFDocument152 pages1 Shear Strength & Slope Stability-IEM Lecture (22feb19) V2notes PDFJensen Tan100% (2)
- Vertical Drain and SurchargeDocument45 pagesVertical Drain and SurchargeKesvinder SinghNo ratings yet
- UnderpinningDocument6 pagesUnderpinningPraveenkumar ShanmugamNo ratings yet
- Bond Strength Between Interfaces of ConcreteDocument21 pagesBond Strength Between Interfaces of ConcreteBhaskar AlapatiNo ratings yet
- 513 Week8Document58 pages513 Week8matsoul100% (3)
- UGS2011 Application of The Hardening Soil Model in Deep Excavation AnalysisDocument14 pagesUGS2011 Application of The Hardening Soil Model in Deep Excavation AnalysisfreezefreezeNo ratings yet
- 1 Introduction (Compatibility Mode)Document45 pages1 Introduction (Compatibility Mode)Steven KuaNo ratings yet
- Rebound Hammer-RH (Schmidt) TestDocument2 pagesRebound Hammer-RH (Schmidt) TestmandregomesNo ratings yet
- Stability of Earthworks To Eurocode 7Document11 pagesStability of Earthworks To Eurocode 7Almenares Juancanyo100% (1)
- ECS 238 - Chapter 2b (Bending and Shear Stresses and in Symmetrical Beams)Document53 pagesECS 238 - Chapter 2b (Bending and Shear Stresses and in Symmetrical Beams)Izzat JalilNo ratings yet
- 1999-Performance Comparison of Bored and Excavated Piles in The Layered Soils of Bangkok PDFDocument10 pages1999-Performance Comparison of Bored and Excavated Piles in The Layered Soils of Bangkok PDFDavid Aponte RojasNo ratings yet
- Ratio of Undrained Shear Stress To Vertical Effective StressDocument5 pagesRatio of Undrained Shear Stress To Vertical Effective StressCarlos AcostaNo ratings yet
- One Smart Cprofile - (2018 Sept)Document20 pagesOne Smart Cprofile - (2018 Sept)111111No ratings yet
- The California Bearing Ratio Method For The Design On Flexible Roads and Runaways-DavisDocument15 pagesThe California Bearing Ratio Method For The Design On Flexible Roads and Runaways-DavisAnonymous GnfGTwNo ratings yet
- CFA Pile Behaviour in Very Stiff Lodgement TillDocument9 pagesCFA Pile Behaviour in Very Stiff Lodgement TillMohamed KadryNo ratings yet
- Literatur Review On Rebound HammerDocument4 pagesLiteratur Review On Rebound HammerAnshul JainNo ratings yet
- V Compaction: Courtesy of U.S. WICK DRAIN, INCDocument74 pagesV Compaction: Courtesy of U.S. WICK DRAIN, INCramlanNo ratings yet
- 5 - CompactionDocument27 pages5 - Compactionalaa AlobeidyeenNo ratings yet
- Pemadatan (Bahan Kuliah OK)Document104 pagesPemadatan (Bahan Kuliah OK)Bagus Eko NugrohoNo ratings yet
- Soil CompactionDocument18 pagesSoil CompactionLiza SyafitriNo ratings yet
- 8-003ضغظ التربة PDFDocument15 pages8-003ضغظ التربة PDFحسامNo ratings yet
- CompactionDocument28 pagesCompactionsitimarlinnachuNo ratings yet
- Soil CompactionDocument71 pagesSoil CompactionNabin YadavNo ratings yet
- Assessment System: Take Assessment - EWAN Chapter 8 - CCNA Exploration: Accessing The WAN (Version 4.0)Document9 pagesAssessment System: Take Assessment - EWAN Chapter 8 - CCNA Exploration: Accessing The WAN (Version 4.0)asceric4363No ratings yet
- Basion Horizontal CobenDocument3 pagesBasion Horizontal CobenJegan KumarNo ratings yet
- Service Manual - NEC Versa 2700 Series LaptopDocument130 pagesService Manual - NEC Versa 2700 Series LaptopToan NguyenNo ratings yet
- Taylor Swift LyricsDocument2 pagesTaylor Swift LyricsElsie DomeNo ratings yet
- Act 1 Almeyda JTLDocument2 pagesAct 1 Almeyda JTLAltairNo ratings yet
- Teacher: Diana Marie V. Aman Science Teaching Dates/Time: Quarter: SecondDocument6 pagesTeacher: Diana Marie V. Aman Science Teaching Dates/Time: Quarter: SecondDiana Marie Vidallon AmanNo ratings yet
- Zam P BLOCK NW 4Document212 pagesZam P BLOCK NW 4mrrsiddiquiNo ratings yet
- Digital Banking A Case Study of India: Solid State Technology December 2020Document10 pagesDigital Banking A Case Study of India: Solid State Technology December 2020Mohit PacharNo ratings yet
- Biogas ProductionDocument7 pagesBiogas ProductionFagbohungbe MichaelNo ratings yet
- Applications Guide 2021 Covering LettersDocument8 pagesApplications Guide 2021 Covering LettersLALUKISNo ratings yet
- 4 Thematic Analysis TemplateDocument19 pages4 Thematic Analysis Templateapi-591189885No ratings yet
- Inactive Volcanoes in The Philippine SDocument6 pagesInactive Volcanoes in The Philippine SChristian ParadoNo ratings yet
- APA-AP - Activity 3-Emerging Ethical and Policy Issues of STSDocument36 pagesAPA-AP - Activity 3-Emerging Ethical and Policy Issues of STSJOHN MARTIN APA-APNo ratings yet
- 3700 S 24 Rev 0 ENDocument3 pages3700 S 24 Rev 0 ENJoão CorrêaNo ratings yet
- Parent Involvement in Education: Kathleen Cotton and Karen Reed WikelundDocument17 pagesParent Involvement in Education: Kathleen Cotton and Karen Reed WikelundMohsin khaliqNo ratings yet
- Guru ShishyaDocument3 pagesGuru ShishyacktacsNo ratings yet
- Toward The Efficient Impact Frontier: FeaturesDocument6 pagesToward The Efficient Impact Frontier: Featuresguramios chukhrukidzeNo ratings yet
- Biochemistry FinalDocument12 pagesBiochemistry FinalAhmed Hamarneh100% (1)
- Rear Drive Halfshafts: 2016.0 RANGE ROVER (LG), 205-05Document46 pagesRear Drive Halfshafts: 2016.0 RANGE ROVER (LG), 205-05SergeyNo ratings yet
- Chapter 1 3 THESISDocument64 pagesChapter 1 3 THESISLyka Cartagena-Pandili Manalo-CabelloNo ratings yet
- Prolog Programs Are A Collection of FactsDocument23 pagesProlog Programs Are A Collection of FactsAbni booNo ratings yet
- In-Band Full-Duplex Interference For Underwater Acoustic Communication SystemsDocument6 pagesIn-Band Full-Duplex Interference For Underwater Acoustic Communication SystemsHarris TsimenidisNo ratings yet
- Exercises in RussianDocument270 pagesExercises in RussiansuzzixxNo ratings yet
- HMT (U4)Document23 pagesHMT (U4)maniNo ratings yet
- CEA Farms Logistics USA Slide Deck (2023!10!31 10-38-56 UTC)Document18 pagesCEA Farms Logistics USA Slide Deck (2023!10!31 10-38-56 UTC)SiyabongaNo ratings yet
- Empower B2 Unit 10 QuizDocument2 pagesEmpower B2 Unit 10 QuizGuidance Teuku Nyak Arif Fatih Bilingual SchoolNo ratings yet
- EmpiricalBasis GottmanDocument10 pagesEmpiricalBasis GottmanMundoSinViolenciaNo ratings yet