Download as pdf or txt
You might also like
- Driving A Class 158Document4 pagesDriving A Class 158Frank NelsonNo ratings yet
- High Rise Concrete Construction Vs High Rise Steel ConstructionDocument4 pagesHigh Rise Concrete Construction Vs High Rise Steel ConstructionnanamallowNo ratings yet
- Sharing The Planet PYP Planner ScienceDocument4 pagesSharing The Planet PYP Planner ScienceDanielRobertson0% (1)
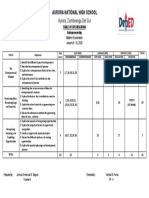
- TOS ENTREPRENEURSHIP Midterm ExamDocument1 pageTOS ENTREPRENEURSHIP Midterm Examjoshua baguio100% (2)
- IncineratorDocument20 pagesIncineratorDanysh ShafeeNo ratings yet
- Audiolab 8000A Owner's Manual PDFDocument10 pagesAudiolab 8000A Owner's Manual PDFRastko ManojlovicNo ratings yet
- Complex Exponential Pseudomodes of LTI Operators Over Finite IntervalsDocument4 pagesComplex Exponential Pseudomodes of LTI Operators Over Finite IntervalsrallabhandiSKNo ratings yet
- Assignment 2 Img PDFDocument7 pagesAssignment 2 Img PDFUtkrisht KashyapNo ratings yet
- Moment-Generating FunctionDocument7 pagesMoment-Generating Functionbrown222No ratings yet
- OEV Poster Gernot A0Document1 pageOEV Poster Gernot A0Michael KollerNo ratings yet
- Introduction To Brukers ScanAsyst and PeakForce Tapping Atomic Force Microscopy Technology - AN133Document12 pagesIntroduction To Brukers ScanAsyst and PeakForce Tapping Atomic Force Microscopy Technology - AN133Fabien CazesNo ratings yet
- Cross CorrelationDocument10 pagesCross Correlationisabella343No ratings yet
- Kfvsexp Final LaviolaDocument8 pagesKfvsexp Final LaviolaMila ApriliyantiNo ratings yet
- 2022 APS April Meeting F01 00048 Qian ChenDocument1 page2022 APS April Meeting F01 00048 Qian ChenGeorge ChenNo ratings yet
- The Relation Between Range Sampling Rate, System Bandwidth, and Variance Reduction in Spectral Averaging For Meteorological RadarDocument7 pagesThe Relation Between Range Sampling Rate, System Bandwidth, and Variance Reduction in Spectral Averaging For Meteorological Radarlpgx1962No ratings yet
- On The Application of The Global Matched Filter toDOA Estimation With Uniform Circular ArraysDocument8 pagesOn The Application of The Global Matched Filter toDOA Estimation With Uniform Circular ArraysMuhammad KhawarNo ratings yet
- Cive302 - Chapter 4 PDFDocument45 pagesCive302 - Chapter 4 PDFAhad NaeemNo ratings yet
- On The Use of Windows For Harmonic AnalysisDocument33 pagesOn The Use of Windows For Harmonic AnalysisDaniel FrancoNo ratings yet
- AutocovarianceDocument3 pagesAutocovarianceisabella343No ratings yet
- Computing Convolutions of Measures - What's NewDocument8 pagesComputing Convolutions of Measures - What's New曹琪勇No ratings yet
- A Practical, Precise Method For Frequency Tracking and Phasor EstimationDocument6 pagesA Practical, Precise Method For Frequency Tracking and Phasor EstimationFabien CallodNo ratings yet
- Velocity Displacement AccelearationDocument14 pagesVelocity Displacement AccelearationNMSYEDNo ratings yet
- LTI SystemsDocument3 pagesLTI SystemsMuhammad Atiq Ur Rehman 22-FET/PHDEE/S19No ratings yet
- Finite Impulse Response Filter: Presentation By: Pravin Kumar SSN College of EngineeringDocument49 pagesFinite Impulse Response Filter: Presentation By: Pravin Kumar SSN College of Engineeringsach jonesNo ratings yet
- Noise in GroverDocument7 pagesNoise in GroverImama RajaNo ratings yet
- A Piloted Adaptive Notch Filter: Yong Ching Lim, Fellow, IEEE, Yue Xian Zou, Member, IEEE, and N. ZhengDocument14 pagesA Piloted Adaptive Notch Filter: Yong Ching Lim, Fellow, IEEE, Yue Xian Zou, Member, IEEE, and N. ZhengsophiaaaNo ratings yet
- Proportionate Normalized Least-Mean-Squares Adaptation in Echo CancelersDocument11 pagesProportionate Normalized Least-Mean-Squares Adaptation in Echo Cancelersc4734168No ratings yet
- Poles, Zeros, and Higher Order FiltersDocument7 pagesPoles, Zeros, and Higher Order FiltersJanNo ratings yet
- Analysis of Very Fast Transient Over Voltages in 150MVA 500KV Transformer by Using Wavelet TransformDocument5 pagesAnalysis of Very Fast Transient Over Voltages in 150MVA 500KV Transformer by Using Wavelet TransformaocalayNo ratings yet
- Multi-Focus Image Fusion Using Discrete Cosine Harmonic Wavelet TransformDocument7 pagesMulti-Focus Image Fusion Using Discrete Cosine Harmonic Wavelet TransformRaad FarhoodNo ratings yet
- Bilinear Transform: Cite References or SourcesDocument6 pagesBilinear Transform: Cite References or SourcessuhmudNo ratings yet
- The Particle Swarm-Explosion, Stability, and Convergence in A Multidimensional Complex SpaceDocument16 pagesThe Particle Swarm-Explosion, Stability, and Convergence in A Multidimensional Complex SpaceAbolfazl AbbasiyanNo ratings yet
- Levinson-DurbinDocument32 pagesLevinson-DurbinSai RangaNo ratings yet
- FinalDocument78 pagesFinalsameera0627No ratings yet
- Eeiol 2006feb04 Ems TaDocument5 pagesEeiol 2006feb04 Ems TaEdsonNo ratings yet
- V Asin (BT) A Abcos (BT) : Conversion Between Displacement, Velocity and AccelerationDocument6 pagesV Asin (BT) A Abcos (BT) : Conversion Between Displacement, Velocity and Accelerationraghu_mnNo ratings yet
- 6.730 Physics For Solid State Applications: Lecture 32: Introduction To Boltzmann TransportDocument12 pages6.730 Physics For Solid State Applications: Lecture 32: Introduction To Boltzmann TransportHùng NguyễnNo ratings yet
- Seismic Data Processing and InterpretationDocument15 pagesSeismic Data Processing and InterpretationmustafaNo ratings yet
- Chapter 9: Applications of The DFT: Impulse Response or Impulse Response FunctionDocument2 pagesChapter 9: Applications of The DFT: Impulse Response or Impulse Response FunctionPremanand SubramaniNo ratings yet
- Indirect Fourier TransformationDocument2 pagesIndirect Fourier Transformationvolly666No ratings yet
- A Comparitive Study of Kalman Filter Extended Kalman Filter and UnscentedDocument9 pagesA Comparitive Study of Kalman Filter Extended Kalman Filter and Unscentedthe man with a brainNo ratings yet
- Sagha, Hossein Ledwich, Gerard Ghosh, Arindam Nourbakhsh, GhavameddinDocument7 pagesSagha, Hossein Ledwich, Gerard Ghosh, Arindam Nourbakhsh, GhavameddinEdsonNo ratings yet
- p38 PDFDocument8 pagesp38 PDFsamandondonNo ratings yet
- Mass Unbalance Analysis FFT An Lissajous DiagramDocument6 pagesMass Unbalance Analysis FFT An Lissajous DiagramJuan Angel Martinez RamirezNo ratings yet
- Tac 2008 927682Document6 pagesTac 2008 927682Ranjit SinghNo ratings yet
- Faksasfi Fanasf FaDocument6 pagesFaksasfi Fanasf FaPedro ErniasNo ratings yet
- Industrial Robotics R16 - Unit-4Document17 pagesIndustrial Robotics R16 - Unit-4shairpally saitejaNo ratings yet
- Priority Queueing Systems: From Probability Generating Functions To Tail ProbabilitiesDocument23 pagesPriority Queueing Systems: From Probability Generating Functions To Tail ProbabilitiesSadasada SadasadasadaNo ratings yet
- Unit - 1.2-15.07.2020-EC8533 - DTSP-Basics of DFTDocument13 pagesUnit - 1.2-15.07.2020-EC8533 - DTSP-Basics of DFTmakNo ratings yet
- Correlation Example: How DATS For Windows Can Be Used To Analyse CorrelationDocument3 pagesCorrelation Example: How DATS For Windows Can Be Used To Analyse CorrelationV.RamachandranNo ratings yet
- Continuous Wave Let Mat LabDocument21 pagesContinuous Wave Let Mat LabDuvan ValenciaNo ratings yet
- Study of Velocity Potential Function and Stream Function - Final PresentationDocument39 pagesStudy of Velocity Potential Function and Stream Function - Final PresentationFarooq ShahNo ratings yet
- Stationary Process: ConttsDocument4 pagesStationary Process: ConttsAhmed AlzaidiNo ratings yet
- 4) Time-Frequency and Time-Scale Analysis: An AlternativeDocument1 page4) Time-Frequency and Time-Scale Analysis: An AlternativePablo Loste RamosNo ratings yet
- DSPDocument6 pagesDSPSibasish Singh SamantaNo ratings yet
- What Is Response Spectrum AnalysisDocument43 pagesWhat Is Response Spectrum AnalysisEJOUMALENo ratings yet
- 'S Method) Is Used In: TustinDocument9 pages'S Method) Is Used In: TustinTom JerryNo ratings yet
- Dynamic CorrectionDocument18 pagesDynamic CorrectionMajid AliNo ratings yet
- 5 - Convolution and Filtering - Week 6Document64 pages5 - Convolution and Filtering - Week 6renatto.guiusseppe.peraltaNo ratings yet
- Secant MethodDocument4 pagesSecant MethodRavinder SinghNo ratings yet
- The Particle Swarm - Explosion Stability and Convergence in A Multidimensional Complex SpaceDocument16 pagesThe Particle Swarm - Explosion Stability and Convergence in A Multidimensional Complex SpaceCarlos AdrianoNo ratings yet
- Lec 01 Random Variables and FiltersDocument30 pagesLec 01 Random Variables and FiltersEng Adel khaledNo ratings yet
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Motion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledFrom EverandMotion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- Mini Baja TemplateDocument5 pagesMini Baja TemplateVinícius CôrtesNo ratings yet
- Analysis of Automobile SuspensionDocument13 pagesAnalysis of Automobile SuspensionAfeez AzizNo ratings yet
- Full Text 01Document92 pagesFull Text 01Vinícius CôrtesNo ratings yet
- Full Text 01Document92 pagesFull Text 01Vinícius CôrtesNo ratings yet
- VocabularyDocument1 pageVocabularyVinícius CôrtesNo ratings yet
- Stability ChecksDocument5 pagesStability Checksshobhit mohtaNo ratings yet
- ME8595-Thermal Engineering-II PDFDocument19 pagesME8595-Thermal Engineering-II PDFVikram mNo ratings yet
- p5sd2-fm SDocument68 pagesp5sd2-fm SDavid Rueda LejarragaNo ratings yet
- Goulds 3316 BulletinDocument12 pagesGoulds 3316 BulletinKEOPSS03No ratings yet
- Class 10 Economics PDFDocument104 pagesClass 10 Economics PDFanirudhNo ratings yet
- Basic PULSE Labshop TutorialDocument52 pagesBasic PULSE Labshop TutorialSufyan AzamNo ratings yet
- Kami Export - Jaden Mills - Angle VocabularyDocument3 pagesKami Export - Jaden Mills - Angle VocabularyJaden MillsNo ratings yet
- Google Algorithm UpdatesDocument8 pagesGoogle Algorithm UpdatesMalik RayyanNo ratings yet
- DRR Wlas Week 8Document14 pagesDRR Wlas Week 8Propsero Luke Godfrey CaberteNo ratings yet
- Unit 3 - Examples Dynamic Magnification FactorDocument4 pagesUnit 3 - Examples Dynamic Magnification FactorJohn Linard AninggaNo ratings yet
- amiTwins1271872EN Wallet Valentine - Pdfresponse Content Disposition &AWSAccessKDocument9 pagesamiTwins1271872EN Wallet Valentine - Pdfresponse Content Disposition &AWSAccessKAndreana RinaNo ratings yet
- Plastic Methods For Steel and Concrete StructuresDocument118 pagesPlastic Methods For Steel and Concrete Structurescall1986100% (1)
- Skills Test 3 & 4 Skills Test 12Document3 pagesSkills Test 3 & 4 Skills Test 12Candelaria LuqueNo ratings yet
- Real Dating Format PDFDocument1 pageReal Dating Format PDFadejareadekunle191No ratings yet
- Jsa Removal Fixing InsulationDocument2 pagesJsa Removal Fixing InsulationAprilia Rizki Ardila63% (8)
- Study Material: Free Master Class SeriesDocument21 pagesStudy Material: Free Master Class SeriesTinku SinglaNo ratings yet
- 2nd Physics Short Ans + MCQDocument23 pages2nd Physics Short Ans + MCQAsif Rasheed Rajput83% (63)
- Network Analysis of Chaotic Dynamics inDocument5 pagesNetwork Analysis of Chaotic Dynamics inansam.moh2016No ratings yet
- RFP For Strategic Planning Advisory Service To OCSSCO 2nd.Document4 pagesRFP For Strategic Planning Advisory Service To OCSSCO 2nd.Tamene DeresaNo ratings yet
- 5 - Workforce DiversityDocument19 pages5 - Workforce DiversityValorant SmurfNo ratings yet
- Smart Code FullDocument490 pagesSmart Code FullAnonymous Dm7FwOJXUNo ratings yet
- Sultan Al Baqami Est. For TradingDocument7 pagesSultan Al Baqami Est. For Tradingsalman KhanNo ratings yet