Download as pdf or txt
You might also like
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- QRP Classics - The Best QRP Projects From QST and The ARRL HandbookDocument282 pagesQRP Classics - The Best QRP Projects From QST and The ARRL Handbookverd leonard100% (9)
- Icom Mic Pinouts PDFDocument15 pagesIcom Mic Pinouts PDFucnopNo ratings yet
- Inspection of The Wing To Fuselage Fairings and Belly Fairing Access Panels For Missing FastenersDocument33 pagesInspection of The Wing To Fuselage Fairings and Belly Fairing Access Panels For Missing FastenersKshitiz RastogiNo ratings yet
- Manual de Servicio LTM1070 Parte 2 GruaDocument192 pagesManual de Servicio LTM1070 Parte 2 GruaYorland92% (12)
- 9859 SMS Manual en V4 2018 OfficialDocument182 pages9859 SMS Manual en V4 2018 OfficialHans Hernandez100% (3)
- Airbus Balancescorecard PPT 130923225913 Phpapp01Document50 pagesAirbus Balancescorecard PPT 130923225913 Phpapp01dj_han85No ratings yet
- Chapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1Document18 pagesChapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1ravifireblade8402No ratings yet
- The Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning卫星时群延迟和频间差码偏差校正对多gnss组合定位的影响Document21 pagesThe Impact of Satellite Time Group Delay and Inter-Frequency Differential Code Bias Corrections on Multi-GNSS Combined Positioning卫星时群延迟和频间差码偏差校正对多gnss组合定位的影响dong wangNo ratings yet
- Comparing Long Baseline Results From GPS and GPS/GLONASSDocument10 pagesComparing Long Baseline Results From GPS and GPS/GLONASSDayallini WinxNo ratings yet
- Development and Test Results of A Cost Effective Inverse DGPS SystemDocument9 pagesDevelopment and Test Results of A Cost Effective Inverse DGPS SystemArindam ChakrabortyNo ratings yet
- Differential Global Positioning System: Marri Laxman Reddy Institute of Technology and ManagementDocument11 pagesDifferential Global Positioning System: Marri Laxman Reddy Institute of Technology and ManagementSanjana PulapaNo ratings yet
- 2007jan - GPS Receiver CalibrationDocument8 pages2007jan - GPS Receiver Calibrationnileshdesai857No ratings yet
- Overview of Gnss Signal Degradation PhenomenaDocument14 pagesOverview of Gnss Signal Degradation Phenomenaاحمد نديم اسماعيلNo ratings yet
- Using Handheld GPS Receivers For Precise Positioni PDFDocument17 pagesUsing Handheld GPS Receivers For Precise Positioni PDFTopo Lucho ArttNo ratings yet
- GNSS Key Aug 2022Document20 pagesGNSS Key Aug 2022srinivas kanakalaNo ratings yet
- Feasibility of Using An S-Band GNSS Carrier by Comparing With L and C BandsDocument13 pagesFeasibility of Using An S-Band GNSS Carrier by Comparing With L and C Bandsاحمد نديم اسماعيلNo ratings yet
- Using Handheld GPS Receivers For Precise Positioning: Volker SCHWIEGER, GermanyDocument16 pagesUsing Handheld GPS Receivers For Precise Positioning: Volker SCHWIEGER, GermanyandysupaNo ratings yet
- Evaluation of RTKLIB's Positioning Accuracy Using Low-Cost GNSS Receiver and ASG-EUPOS PDFDocument7 pagesEvaluation of RTKLIB's Positioning Accuracy Using Low-Cost GNSS Receiver and ASG-EUPOS PDFSudung SitumorangNo ratings yet
- GNSS Master Clock and ReferenceDocument5 pagesGNSS Master Clock and Referencejohn BronsonNo ratings yet
- A Data Quality Assessment Approach For High-PrecisDocument22 pagesA Data Quality Assessment Approach For High-Preciskyambadde hudsonNo ratings yet
- Chen 2017Document24 pagesChen 2017wn1529.20000No ratings yet
- Starlink StructureDocument14 pagesStarlink StructureZoran ConstantinescuNo ratings yet
- Starlink StructureDocument14 pagesStarlink Structurestephanus andyNo ratings yet
- High Accuracy GPS and Antijam Protection Using A P (Y) Code Digital Beamsteering ReceiverDocument10 pagesHigh Accuracy GPS and Antijam Protection Using A P (Y) Code Digital Beamsteering ReceiverGyana SahooNo ratings yet
- Leica AR25 White PaperDocument10 pagesLeica AR25 White PaperSergiy PogoryelovNo ratings yet
- On The Location Accuracy of The Multi-AntennaDocument5 pagesOn The Location Accuracy of The Multi-Antennaاحمد نديم اسماعيلNo ratings yet
- Integrating INS and GNSS Sensors To Provide Reliable Surface PositioningDocument12 pagesIntegrating INS and GNSS Sensors To Provide Reliable Surface PositioningXa MauNo ratings yet
- Amt 7 3801 2014Document11 pagesAmt 7 3801 2014satsatsatsatNo ratings yet
- What Is RTK (Real-Time Kinematic) ?Document9 pagesWhat Is RTK (Real-Time Kinematic) ?Renz Janfort Junsay GraganzaNo ratings yet
- Satellite Based SurveyingDocument8 pagesSatellite Based SurveyingMusiime AlvinNo ratings yet
- Tutorial GPS Receiver Architectures - Front-End and Baseband Signal ProcessingDocument18 pagesTutorial GPS Receiver Architectures - Front-End and Baseband Signal Processinggaurav kumar100% (1)
- A Subspace-Based Spatial and Temporal Multipath Mitigation For Multi-Antenna GPS ReceiverDocument11 pagesA Subspace-Based Spatial and Temporal Multipath Mitigation For Multi-Antenna GPS Receiverاحمد نديم اسماعيلNo ratings yet
- 6 Trimble HD-GNSS White PaperDocument13 pages6 Trimble HD-GNSS White PaperpuputrahsetyoNo ratings yet
- DME Modell Preprint PDFDocument17 pagesDME Modell Preprint PDFAnonymous 3ORE6hNo ratings yet
- Comparison Between GPS and Galileo Satellite Availability in The Presence of CW InterferenceDocument15 pagesComparison Between GPS and Galileo Satellite Availability in The Presence of CW Interference廣廣No ratings yet
- A Subspace Based Code Tracking Loop Design For GPS Multi Antenna Receiver in Multipath EnvironmentDocument17 pagesA Subspace Based Code Tracking Loop Design For GPS Multi Antenna Receiver in Multipath Environmentاحمد نديم اسماعيلNo ratings yet
- Differential Global Positioning SystemDocument16 pagesDifferential Global Positioning SystemhimanshusabooNo ratings yet
- 05GNSS Nicholson EtalDocument12 pages05GNSS Nicholson EtalzohreNo ratings yet
- DCB Estimation and Analysis Using The Single Receiver GPS G - 2023 - Advances inDocument13 pagesDCB Estimation and Analysis Using The Single Receiver GPS G - 2023 - Advances inabdelmoamen nosirNo ratings yet
- Dual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsDocument4 pagesDual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsСергей ТатарченкоNo ratings yet
- Satrack Full Report New2Document17 pagesSatrack Full Report New2ammayi9845_930467904No ratings yet
- Intro To GNSS DPS Range (132/232/4D/5D) GNSS+INS (4D/5D Performance) Recommendations DPO DGNSS Check ListDocument47 pagesIntro To GNSS DPS Range (132/232/4D/5D) GNSS+INS (4D/5D Performance) Recommendations DPO DGNSS Check ListDouglas BemficaNo ratings yet
- Analysis of Navigation Satellite System Based On The Ground Control Points (GCP) at Universiti Kebangsaan MalaysiaDocument11 pagesAnalysis of Navigation Satellite System Based On The Ground Control Points (GCP) at Universiti Kebangsaan Malaysiamansang.mc62No ratings yet
- Sensors 23 08835Document16 pagesSensors 23 08835Ahmad ZezoNo ratings yet
- Notes GpsDocument17 pagesNotes Gpsbooks babuNo ratings yet
- Publi 7237Document6 pagesPubli 7237Bojan SubasicNo ratings yet
- ModellingDME PreprintDocument11 pagesModellingDME Preprintmhemnhaidar90No ratings yet
- Gps Receiver ThesisDocument4 pagesGps Receiver Thesisafbtkukvd100% (2)
- A Preliminary Implementation Study of TDMA-based Positioning System Utilizing USRP and GNU RadioDocument10 pagesA Preliminary Implementation Study of TDMA-based Positioning System Utilizing USRP and GNU Radio18021155 Lê Tất ThắngNo ratings yet
- Tao 2021Document13 pagesTao 2021Mohamed RIZKINo ratings yet
- Detailed Analysis of The Impact of The Code Doppler OnDocument13 pagesDetailed Analysis of The Impact of The Code Doppler OnSai BabaNo ratings yet
- Performance of Low-Cost GNSS Receiver For Landslides Monitoring Test and ResultsDocument19 pagesPerformance of Low-Cost GNSS Receiver For Landslides Monitoring Test and Resultsעִמָּנוּאֵל פרחNo ratings yet
- Navigation With GNSS and IMUDocument4 pagesNavigation With GNSS and IMUTuğrul YazganNo ratings yet
- Lec11 TLT5606 SDocument53 pagesLec11 TLT5606 SelhocineNo ratings yet
- Working Under Canopy RTK Survey PDFDocument3 pagesWorking Under Canopy RTK Survey PDFdeepfutelaNo ratings yet
- Flight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS ProfileDocument5 pagesFlight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS ProfileRR886No ratings yet
- Development and Assessment of A Medium-Range RealDocument7 pagesDevelopment and Assessment of A Medium-Range RealEduardo AdNo ratings yet
- Interference Mitigation Approaches For The Global Positioning SystemDocument14 pagesInterference Mitigation Approaches For The Global Positioning SystemChadiNo ratings yet
- Carrier Phase DGPSDocument3 pagesCarrier Phase DGPSparareceberspamsNo ratings yet
- Applsci 12 05193 v4Document21 pagesApplsci 12 05193 v4BENNANI MUSTAPHA1No ratings yet
- An Introduction To The Global PositioninDocument28 pagesAn Introduction To The Global PositioninhenrytulyamulebaNo ratings yet
- On the Short-term Temporal Variations of GNSS Receiver Differential Phase BiasesGNSS接收机差分相位偏差的短时变化Document32 pagesOn the Short-term Temporal Variations of GNSS Receiver Differential Phase BiasesGNSS接收机差分相位偏差的短时变化dong wangNo ratings yet
- Optimal Post-Detection Integration Technique For The Reacquisition of Weak GNSS SignalsDocument18 pagesOptimal Post-Detection Integration Technique For The Reacquisition of Weak GNSS SignalsNelarapuMaheshNo ratings yet
- Kinematic Positioning With An Integrated GPS/Pseudolite/INS: Hung Kyu Lee, Jinling Wang, Chris RizosDocument12 pagesKinematic Positioning With An Integrated GPS/Pseudolite/INS: Hung Kyu Lee, Jinling Wang, Chris RizosTeguh OktaprimaNo ratings yet
- MD380tools VM Installation 3.08 PDFDocument22 pagesMD380tools VM Installation 3.08 PDFucnopNo ratings yet
- MD-390 GPS Operation PDFDocument2 pagesMD-390 GPS Operation PDFucnopNo ratings yet
- TYT MD380 Power Change PDFDocument1 pageTYT MD380 Power Change PDFucnopNo ratings yet
- Setup A MMDVM Hotspot 20161204 PDFDocument12 pagesSetup A MMDVM Hotspot 20161204 PDFucnopNo ratings yet
- MD380 User Guide PDFDocument10 pagesMD380 User Guide PDFucnopNo ratings yet
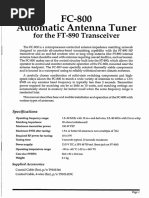
- FC800 Service PDFDocument16 pagesFC800 Service PDFucnopNo ratings yet
- MMDVM C4FM and Motorola GM350 PDFDocument10 pagesMMDVM C4FM and Motorola GM350 PDFucnopNo ratings yet
- ZumSpot Pistar CONF PDFDocument8 pagesZumSpot Pistar CONF PDFucnopNo ratings yet
- FT-4700 RH Manual and Schematic PDFDocument30 pagesFT-4700 RH Manual and Schematic PDFucnopNo ratings yet
- 2m Pa 4cx250 PDFDocument29 pages2m Pa 4cx250 PDFucnopNo ratings yet
- Antenna Manuscript v.01 PDFDocument295 pagesAntenna Manuscript v.01 PDFucnopNo ratings yet
- fc800 Manual PDFDocument16 pagesfc800 Manual PDFucnopNo ratings yet
- MC MicroDocument23 pagesMC Microelectro232No ratings yet
- aNTENNA x200.003 PDFDocument2 pagesaNTENNA x200.003 PDFucnopNo ratings yet
- All Alinco Modification From Mods DK in One File PDFDocument136 pagesAll Alinco Modification From Mods DK in One File PDFucnopNo ratings yet
- 4CX250M PDFDocument3 pages4CX250M PDFucnopNo ratings yet
- Drag CoefficientDocument7 pagesDrag CoefficientAdrian John Soe Myint100% (1)
- معجم مصطلحات عسكرية انكليزي عربيDocument495 pagesمعجم مصطلحات عسكرية انكليزي عربيjawad9990100% (1)
- Space Exploration A Waste of MoneyDocument3 pagesSpace Exploration A Waste of MoneySiddharth JainNo ratings yet
- 1965 Beech A23 II Musketeer: Ownership HistoryDocument5 pages1965 Beech A23 II Musketeer: Ownership HistoryFred FubarskiNo ratings yet
- Far 121Document342 pagesFar 121snipshot7No ratings yet
- List of Approved DOADocument58 pagesList of Approved DOAMartin FisherNo ratings yet
- FM 3e SM Chap06Document96 pagesFM 3e SM Chap06raees ahmadNo ratings yet
- B Oeing 747-281F: Aircraft Data Weight and FuelDocument9 pagesB Oeing 747-281F: Aircraft Data Weight and FuelLilianaVargasNo ratings yet
- CS-23 Amdt 3 PDFDocument405 pagesCS-23 Amdt 3 PDFGiovanni PerisiNo ratings yet
- Seventy-Five Years of Inflight Refueling Highlights, 1923-1998Document90 pagesSeventy-Five Years of Inflight Refueling Highlights, 1923-1998Bob AndrepontNo ratings yet
- On Plinth DesignDocument20 pagesOn Plinth DesignHunny VermaNo ratings yet
- Aircraft Fueling BAA HEATHROW Operational Safety InstructionDocument6 pagesAircraft Fueling BAA HEATHROW Operational Safety Instructionsinglebiker77No ratings yet
- Tower A DesignDocument254 pagesTower A DesignAnderson Quispe VilcaNo ratings yet
- Wing Design ParametersDocument5 pagesWing Design ParametersMakam VenkateshNo ratings yet
- Ardu CopterDocument111 pagesArdu Copteranh_comdrNo ratings yet
- Types Ground Based Airport Amphibious AirportDocument19 pagesTypes Ground Based Airport Amphibious AirportSuhail AhmedNo ratings yet
- Hydraulic Basics PDFDocument5 pagesHydraulic Basics PDFHashem Mohamed HashemNo ratings yet
- A Theoretical Method For The Design of Marine Tandem PropellersDocument6 pagesA Theoretical Method For The Design of Marine Tandem PropellersMH BappyNo ratings yet
- Check Yourself: CockpitDocument3 pagesCheck Yourself: CockpitPanos GiannakopoulosNo ratings yet
- Composite Materials 2marksDocument46 pagesComposite Materials 2marksHemaprasanthNo ratings yet
- Course Schedule PR 201718 1Document58 pagesCourse Schedule PR 201718 1kumar singhNo ratings yet
- Large Kaplan Units - Case Study XayaburiDocument17 pagesLarge Kaplan Units - Case Study XayaburislamienkaNo ratings yet
- 010 090eng - v3Document245 pages010 090eng - v3ayushNo ratings yet
- A320 Dual Engine Failure ChecklistDocument2 pagesA320 Dual Engine Failure ChecklistLee NichollNo ratings yet
- Drone 360. Vol.2, Issue 5 (2017) PDFDocument92 pagesDrone 360. Vol.2, Issue 5 (2017) PDFRAJNo ratings yet