Download as pdf or txt
You might also like
- B2B - Seca - grp9 - Maersk Line B2B Social MediaDocument2 pagesB2B - Seca - grp9 - Maersk Line B2B Social MediaDivyany Pandey100% (1)
- Feynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsFrom EverandFeynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsNo ratings yet
- Saep 11Document35 pagesSaep 11Anonymous 4IpmN7OnNo ratings yet
- Engineering VibrationsDocument43 pagesEngineering VibrationsClayton Roe100% (3)
- Best Ignored: Force Constant "K"Document3 pagesBest Ignored: Force Constant "K"Tuan TranNo ratings yet
- Base ExcitationDocument51 pagesBase ExcitationAjitsingh JagtapNo ratings yet
- Dynamics - Chapter 19 (Beer7)Document32 pagesDynamics - Chapter 19 (Beer7)api-3709496100% (2)
- Introduction To Free Vibration: MXT KXT MXT KXT X XX VDocument7 pagesIntroduction To Free Vibration: MXT KXT MXT KXT X XX VJaffar AliNo ratings yet
- V&N 354 LectureLesing4Document6 pagesV&N 354 LectureLesing4YemukelaniNo ratings yet
- Chap 1 OscillationsDocument53 pagesChap 1 OscillationskhaledstephannNo ratings yet
- Physical Electronics I: Introduction To Quantum MechanicsDocument41 pagesPhysical Electronics I: Introduction To Quantum MechanicsOPIYO ONYANGONo ratings yet
- Response To Harmonic ExcitationDocument51 pagesResponse To Harmonic ExcitationAjitsingh JagtapNo ratings yet
- Oscillation and Stability in A Mass Spring System: June 2018Document7 pagesOscillation and Stability in A Mass Spring System: June 2018Diana ApetreiNo ratings yet
- Formulas in Solid Mechanics - Division of Solid Mechanics PDFDocument26 pagesFormulas in Solid Mechanics - Division of Solid Mechanics PDF陳琮方No ratings yet
- wk4 Lectrure4 23oct2018Document21 pageswk4 Lectrure4 23oct2018هاني احمدNo ratings yet
- Simple Harmonic MotionDocument23 pagesSimple Harmonic MotionAdeeba JunaidiNo ratings yet
- Laws of Motion FrictionDocument4 pagesLaws of Motion Frictionrajputraghav777No ratings yet
- Applications: Sri / Ode / 2 Order / ApplicationsDocument6 pagesApplications: Sri / Ode / 2 Order / ApplicationsnazirulaliNo ratings yet
- Normal Modes of Vibration On A String: X X X T+ X X TDocument3 pagesNormal Modes of Vibration On A String: X X X T+ X X TJESSICA BERENICE SANDOVAL REYESNo ratings yet
- Unit 2 - Basics of Vibration TheoryDocument8 pagesUnit 2 - Basics of Vibration TheoryFroilan NeyNo ratings yet
- 3 Mathematical Models of SystemsDocument35 pages3 Mathematical Models of SystemsDawa PenjorNo ratings yet
- LECT9 6pDocument14 pagesLECT9 6pAbidul IslamNo ratings yet
- 4 SHM - HkbuDocument39 pages4 SHM - HkbuPutri NainggolanNo ratings yet
- Fluid Dynamics: Lecture Notes For MATH 6750Document43 pagesFluid Dynamics: Lecture Notes For MATH 6750Sathish PNo ratings yet
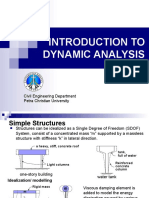
- 3-Introduction To Dynamic AnalysisDocument16 pages3-Introduction To Dynamic Analysiskenny lieNo ratings yet
- Sensor Devices Mechanical SensorsDocument41 pagesSensor Devices Mechanical Sensorsdesaivilas60100% (1)
- Models of Stellar Atmospheres: Department of Astronomy Vienna UniversityDocument46 pagesModels of Stellar Atmospheres: Department of Astronomy Vienna UniversityGloria Evelin Vargas SirpaNo ratings yet
- PHM031 - Modern Mechanics - Lecture 5Document19 pagesPHM031 - Modern Mechanics - Lecture 5Mohammed ZaitounNo ratings yet
- Moment of InertiaDocument27 pagesMoment of InertiaPinca JoshuaNo ratings yet
- University Physics: Waves and Electricity: Dr.-Ing. Erwin SitompulDocument37 pagesUniversity Physics: Waves and Electricity: Dr.-Ing. Erwin SitompulAliNo ratings yet
- Emg 3103 Solid and Structural Mechanics I Stress and StrainDocument36 pagesEmg 3103 Solid and Structural Mechanics I Stress and StrainJosline MuriikiNo ratings yet
- Vibration Analysis and MonitoringDocument33 pagesVibration Analysis and MonitoringSlim ShaddysNo ratings yet
- Simple Harmonic Motion: AnnouncementsDocument14 pagesSimple Harmonic Motion: AnnouncementsAnthony BensonNo ratings yet
- General Physics Ch2.5Document5 pagesGeneral Physics Ch2.5abenezeryalew02No ratings yet
- Fick Second LawDocument9 pagesFick Second LawJohnny WoodsNo ratings yet
- AP1 Simple Harmonic Motion Presenter W AnswersDocument33 pagesAP1 Simple Harmonic Motion Presenter W AnswersDamion Mcdowell100% (1)
- 3 - Unit 2 ME 70 Free Vibration Lecture 1Document22 pages3 - Unit 2 ME 70 Free Vibration Lecture 1KEZIA MAE JALANDONINo ratings yet
- 信號期中大抄Document2 pages信號期中大抄林昱呈No ratings yet
- Chapter 1-Measurements and Uncertainties: Significant FiguresDocument16 pagesChapter 1-Measurements and Uncertainties: Significant FiguresSuraj KumarNo ratings yet
- Autonomous Underwater Vehicles: Equations of Motion: Monique Chyba - November 18, 2015Document17 pagesAutonomous Underwater Vehicles: Equations of Motion: Monique Chyba - November 18, 2015anitapinkyNo ratings yet
- Lecture 2 Theoritical BackgroundDocument7 pagesLecture 2 Theoritical BackgroundBerli Octaviana ManurungNo ratings yet
- Practice Exam #4 Problem 1: Ripplons (35 points) : k hω (k) ≡ (k) = bk k = (2π/L x + (2π/LDocument5 pagesPractice Exam #4 Problem 1: Ripplons (35 points) : k hω (k) ≡ (k) = bk k = (2π/L x + (2π/L*83*22*No ratings yet
- Optics Sec2Document20 pagesOptics Sec2Shahd MuhamedNo ratings yet
- PHYSICS Own NotesDocument4 pagesPHYSICS Own NotesMica BernardoNo ratings yet
- Free and Forced Vibration of A Single Degree of Freedom Mechanical SystemDocument8 pagesFree and Forced Vibration of A Single Degree of Freedom Mechanical SystemburakNo ratings yet
- Unit Impulse Overview - Unit Step - Switches - Unit Impulse - RelationshipsDocument13 pagesUnit Impulse Overview - Unit Step - Switches - Unit Impulse - RelationshipsSonia KanwalNo ratings yet
- Stress-Intensity Factors For Circular Hollow Section V-Joints With A Rack-Plate ChordDocument19 pagesStress-Intensity Factors For Circular Hollow Section V-Joints With A Rack-Plate ChordSai KrishnaNo ratings yet
- Loss of Energy Concentration in Nonlinear Evolution Beam Equations (Journal of Nonlinear Science) (2017)Document39 pagesLoss of Energy Concentration in Nonlinear Evolution Beam Equations (Journal of Nonlinear Science) (2017)rxflexNo ratings yet
- Week 2Document5 pagesWeek 2Anna AfrianNo ratings yet
- Vibration Chapter03 Harmonic Excited VibDocument37 pagesVibration Chapter03 Harmonic Excited Vibmargiyanto108No ratings yet
- ProjetStar Meziane MahaDocument15 pagesProjetStar Meziane MahaMaha MezianeNo ratings yet
- DOM M S D F Harmonical Excited Vibration 1Document90 pagesDOM M S D F Harmonical Excited Vibration 1Prajapati DhavalNo ratings yet
- 6 Lecture 6: Momentum and Variable-Mass ProblemsDocument3 pages6 Lecture 6: Momentum and Variable-Mass ProblemsTiagoNo ratings yet
- Motion Along A Straight Line.: AP Physics C Review Equations For MechanicsDocument4 pagesMotion Along A Straight Line.: AP Physics C Review Equations For MechanicsCyou97No ratings yet
- Continuous Systems: P ChandramouliDocument43 pagesContinuous Systems: P ChandramouliPranav RaveendranNo ratings yet
- Physics G.e.1.1 Unit IIDocument21 pagesPhysics G.e.1.1 Unit IIgyanaranjansahulipu637No ratings yet
- CBSE Class 11 Physics Notes For Properties of Bulk MatterDocument20 pagesCBSE Class 11 Physics Notes For Properties of Bulk MatterAyush Kumar100% (1)
- Physics 111: Mechanics: Dale GaryDocument18 pagesPhysics 111: Mechanics: Dale GaryAsif AliNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Electric Circuits Using SimulinkDocument23 pagesElectric Circuits Using SimulinkYousef SardahiNo ratings yet
- Advanced Control Using Matlab PDFDocument564 pagesAdvanced Control Using Matlab PDFYousef SardahiNo ratings yet
- Chapter 1: Measurement SystemsDocument15 pagesChapter 1: Measurement SystemsYousef SardahiNo ratings yet
- (Asif Mahmood Mughal) Real Time Modeling, Simulati (B-Ok - Xyz)Document199 pages(Asif Mahmood Mughal) Real Time Modeling, Simulati (B-Ok - Xyz)Yousef SardahiNo ratings yet
- Politics, Identification, and SubjectivizationDocument8 pagesPolitics, Identification, and SubjectivizationJuan PérezNo ratings yet
- CFD 06 Kainz ANSYS Instationaere Kopplung Von SchaufelreihenDocument40 pagesCFD 06 Kainz ANSYS Instationaere Kopplung Von SchaufelreihenmohamedezeldinNo ratings yet
- DAO 29-92 IRR Ra6969 PDFDocument39 pagesDAO 29-92 IRR Ra6969 PDFaeronastyNo ratings yet
- Oracle Tca DQMDocument17 pagesOracle Tca DQManand.g7720No ratings yet
- Images!: Best Practices For Adding Images!Document16 pagesImages!: Best Practices For Adding Images!RiajiminNo ratings yet
- Activity Based CostingDocument49 pagesActivity Based CostingkumarmkjNo ratings yet
- An Evaluation of Nine Bowie and Dick Test Products Available in The United Kingdom (Published IDSc J Aug 2012)Document12 pagesAn Evaluation of Nine Bowie and Dick Test Products Available in The United Kingdom (Published IDSc J Aug 2012)rgj9No ratings yet
- I Do Like CFD Vol1 - 2ed - v00Document299 pagesI Do Like CFD Vol1 - 2ed - v00ipixunaNo ratings yet
- Easton College FE Prospectus 2012Document68 pagesEaston College FE Prospectus 2012Easton CollegeNo ratings yet
- Basic Course PHP 11,000: Application FormDocument2 pagesBasic Course PHP 11,000: Application FormMon GuioNo ratings yet
- Drawing and Verbal Answers As WellDocument2 pagesDrawing and Verbal Answers As WellRaeesa SNo ratings yet
- 1 (Ciphers)Document23 pages1 (Ciphers)Anand RajNo ratings yet
- Industry 4.0. German Standardization RoadmapDocument77 pagesIndustry 4.0. German Standardization Roadmapmihai.banicaNo ratings yet
- How To Crack IIT JEEDocument21 pagesHow To Crack IIT JEEeduflix100% (5)
- Iso 14050Document45 pagesIso 14050garejkaNo ratings yet
- Links For Production Planning and ControlDocument4 pagesLinks For Production Planning and ControlmehatajmosiqNo ratings yet
- P-Diagram - Project Marcel Transmission SystemDocument1 pageP-Diagram - Project Marcel Transmission SystemkumarNo ratings yet
- Probabilistic Robotics: Bayes Filter ImplementationsDocument11 pagesProbabilistic Robotics: Bayes Filter ImplementationsRogers SureNo ratings yet
- Kojeve Schmitt ColonialismDocument40 pagesKojeve Schmitt Colonialismgreyanderson7096100% (1)
- Discussion Phrases GuideDocument2 pagesDiscussion Phrases GuideRoderick Balce100% (1)
- Chapter FourDocument75 pagesChapter FourMehretu Abate100% (1)
- 9std Geography Chapter 1. Distributional MapsDocument8 pages9std Geography Chapter 1. Distributional MapsArnav Shinde100% (1)
- PYRAMIDOLOGYDocument92 pagesPYRAMIDOLOGYverdiblue100% (2)
- Mignolo Interview PluriversityDocument38 pagesMignolo Interview PluriversityJamille Pinheiro DiasNo ratings yet
- b28113433 PDFDocument202 pagesb28113433 PDFJuthika GogoiNo ratings yet
- Concrete Hinges in Bridge EngineeringDocument12 pagesConcrete Hinges in Bridge EngineeringDong-Yong KimNo ratings yet
- ITSD Document StandardDocument77 pagesITSD Document StandardhenrykylawNo ratings yet
- RefacDocument5 pagesRefacknight1729No ratings yet