Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Boonton Micro Wattmeters Models 42 B, BD, C, CD IEEE-488 InterfaceDocument2 pagesBoonton Micro Wattmeters Models 42 B, BD, C, CD IEEE-488 Interface240GL guyNo ratings yet
- FSK ModulationDocument16 pagesFSK ModulationKavitha Mohan100% (2)
- Chapter 4 - Data UnitDocument35 pagesChapter 4 - Data UnitPrahvin MuruganNo ratings yet
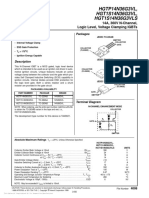
- Hgtp14N36G3Vl, Hgt1S14N36G3Vl, Hgt1S14N36G3Vls: 14A, 360V N-Channel, Logic Level, Voltage Clamping IgbtsDocument6 pagesHgtp14N36G3Vl, Hgt1S14N36G3Vl, Hgt1S14N36G3Vls: 14A, 360V N-Channel, Logic Level, Voltage Clamping IgbtsDeiry Katherine Marquez RamirezNo ratings yet
- Astable CircuitsDocument9 pagesAstable CircuitsRavindranath ShrivastavaNo ratings yet
- APS Product Datasheet - YC500 2.20.15Document2 pagesAPS Product Datasheet - YC500 2.20.15Iram Ramírez VergaraNo ratings yet
- TSM1206 040Document49 pagesTSM1206 040Isos CellNo ratings yet
- Manual de Usuario STM32F334Document69 pagesManual de Usuario STM32F334Juancho jimenez LopezNo ratings yet
- Fire and Gas Detection Systems Product Catalogue Morley-IAS V2.1Document230 pagesFire and Gas Detection Systems Product Catalogue Morley-IAS V2.1mgkvprNo ratings yet
- Etsi en 300 330 V2.1.1 (2016-11)Document77 pagesEtsi en 300 330 V2.1.1 (2016-11)michaelyoeNo ratings yet
- Understanding Bandwidth ConceptsDocument1 pageUnderstanding Bandwidth ConceptsEdsel Alfred OtaoNo ratings yet
- 87 10249 RevE DT4032E 00 DigTransceiverDocument2 pages87 10249 RevE DT4032E 00 DigTransceiverĐặng ĐứcNo ratings yet
- Apparatus:: AIM: Acquire The Knowledge of Output Devices Like CRO and DSO For Observing OutputDocument5 pagesApparatus:: AIM: Acquire The Knowledge of Output Devices Like CRO and DSO For Observing OutputAdwait BorikarNo ratings yet
- Multifunction Digital: Clamp MeterDocument9 pagesMultifunction Digital: Clamp MeterAgung DuemilanoveNo ratings yet
- 1mrk505265-Ben - en Product Guide Busbar Protection Reb650 Iec PDFDocument61 pages1mrk505265-Ben - en Product Guide Busbar Protection Reb650 Iec PDFaashish bissaNo ratings yet
- STR Se501Document48 pagesSTR Se501ironmike615646No ratings yet
- Cell Phone Detector Literature ReviewDocument7 pagesCell Phone Detector Literature Reviewmwjhkmrif100% (1)
- Guid StatsDocument16 pagesGuid StatsSkija Se StieNo ratings yet
- ADocument12 pagesAPs Negativ100% (1)
- Dos and Bios InterruptsDocument5 pagesDos and Bios InterruptsRaj KumarNo ratings yet
- ST50 Series Plasma: 2012 VieraDocument2 pagesST50 Series Plasma: 2012 VieraIBJSC.comNo ratings yet
- Maximum Power Transfer TheoremDocument15 pagesMaximum Power Transfer TheoremAnthony Jay CombateNo ratings yet
- EVlink Smart Wallbox - 7.4-22 KW - T2 - RFIDDocument2 pagesEVlink Smart Wallbox - 7.4-22 KW - T2 - RFIDfoxNo ratings yet
- HP Workstation xw6200: Service and Technical Reference GuideDocument209 pagesHP Workstation xw6200: Service and Technical Reference GuideAlessandro IppolitoNo ratings yet
- AONR21357 ReemplazoDocument6 pagesAONR21357 ReemplazoDavid Enrique Rivero CahuichNo ratings yet
- Manual TTI TCB-770 ENGDocument16 pagesManual TTI TCB-770 ENGyuriikyzymaNo ratings yet
- Protection Relay REX 521: Operator's ManualDocument32 pagesProtection Relay REX 521: Operator's Manualmohammed youisf100% (1)
- Qrs14 0 GyroscopeDocument8 pagesQrs14 0 GyroscopeJavier MiramontesNo ratings yet
- Electronics Final ExamDocument5 pagesElectronics Final ExamGood Guy100% (3)
- Commercial Integrated Receiver/TranscoderDocument2 pagesCommercial Integrated Receiver/TranscoderIrving MartinNo ratings yet